


MAT 247 Engineering Mathematics
Hakkı Ula¸s ¨
Unal
Dept. of Electrical-Electronics Eng.
Anadolu University, Turkey
September 26, 2018
MAT 247 Eng. Math. September 26, 2018 1 / 12














Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
A portion of lecture notes from a university course on engineering mathematics (mat 247) taught by hakkı ulaş unal at anadolu university in turkey. The notes cover the topic of vectors, including their definition, representation using components in a cartesian coordinate frame, vector equality, vector summation and subtraction, scalar multiplication, and the dot or inner product. The document also discusses the geometric interpretation of inner products and the vector cross product.
Typology: Lecture notes
1 / 31

This page cannot be seen from the preview
Don't miss anything!
Hakkı Ula¸s Unal¨ Dept. of Electrical-Electronics Eng. Anadolu University, Turkey
September 26, 2018
Today
(^1) Vector Algebra
Vectors
Physical quantities are often specified by one number or magnitude. The physical quantities, such a mass, time, temperature, speed are fully specified by one number, which we call scalar. However, they don’t provide us more information. For instance, speed of a car does not say anything about its direction.
Vectors
Physical quantities are often specified by one number or magnitude. The physical quantities, such a mass, time, temperature, speed are fully specified by one number, which we call scalar. However, they don’t provide us more information. For instance, speed of a car does not say anything about its direction. There exists some quantities, such as force, velocity, which require more than one number to describe them. A vector is a quantity that has both magnitude and direction. We can say that a vector is an arrow or a directed line segment.
Component of vectors
Dimension of a vector corresponds to number of its elements. A method of representing a vector is to list its elements in a sufficient number of different directions, which define a coordinate frame.
Component of vectors
Dimension of a vector corresponds to number of its elements. A method of representing a vector is to list its elements in a sufficient number of different directions, which define a coordinate frame. In this course, we will focus on Cartesian coordinate frame
Vector Equality
A vector a is equal to a vector b means, they have same magnitude (or length) and a direction. This means a = [a 1 , a 2 , a 3 ] and b = [b 1 , b 2 , b 3 ] in a Cartesian coordinate frame are equal to each other iff a 1 = b 1 a 2 = b 2 a 3 = b 3
Vector Equality
A vector a is equal to a vector b means, they have same magnitude (or length) and a direction. This means a = [a 1 , a 2 , a 3 ] and b = [b 1 , b 2 , b 3 ] in a Cartesian coordinate frame are equal to each other iff a 1 = b 1 a 2 = b 2 a 3 = b 3 Magnitude of a vector a is
a = |a| =
a^21 + a^22 + a^23.
Vector Summation and Substraction
Let a = [a 1 , a 2 , a 3 ] and b = [b 1 , b 2 , b 3 ]. Then,
a + b = [a 1 + b 1 , a 2 + b 2 , a 3 + b 3 ,
and a − b = a + (−b) = [a 1 − b 1 , a 2 − b 2 , a 3 − b 3 ,
Vector Summation and Substraction
Let a = [a 1 , a 2 , a 3 ] and b = [b 1 , b 2 , b 3 ]. Then,
a + b = [a 1 + b 1 , a 2 + b 2 , a 3 + b 3 ,
and a − b = a + (−b) = [a 1 − b 1 , a 2 − b 2 , a 3 − b 3 , Properties of vector summation: I (^) a + b = b + a I (^) (a + b) + c = a + (b + c) = a + b + c I (^) a + 0 = a I (^) a + (−a) = 0
Scalar Multiplication of Vector
Multiplication of a vector a by a scalar c (c is real number) can be defined as ca = [ca 1 , ca 2 , ca 3 ]. Scalar multiplication keeps the direction of the vector a if c > 0, otherwise, the direction is reversed unless c = 0.
Scalar Multiplication of Vector
Multiplication of a vector a by a scalar c (c is real number) can be defined as ca = [ca 1 , ca 2 , ca 3 ]. Scalar multiplication keeps the direction of the vector a if c > 0, otherwise, the direction is reversed unless c = 0. Properties of scalar multiplication: I (^) c(a + b) = ca + cb I (^) c(ka) = (ck)a I (^1) a = a
Dot or Inner Product
Inner product of two vectors a = [a 1 , a 2 , a 3 ] and b = [b 1 , b 2 , b 3 ] is defined as: a·b = a 1 b 1 + a 2 b 2 + a 3 b 3 ] Properties of inner product: a·b = b · a a · (b + c) = a · b + a · c (ka) · b = k(a · b)
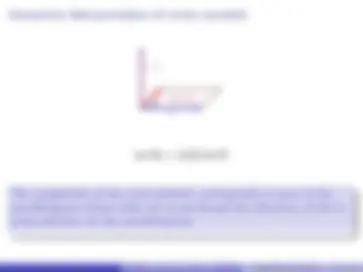
Geometric Interpretation of Inner Product
a
c b
θ
c^2 = a^2 + b^2 − 2 ab cos θ
|a − b|^2 = (a − b) · (a − b) |a − b|^2 = a · a + b · b − 2(a · b) |a − b|^2 = a^2 + b^2 − 2(a · b)