Download Keyframing and Rotation Interpolation in Animation and more Study notes Fundamentals of Design in PDF only on Docsity!
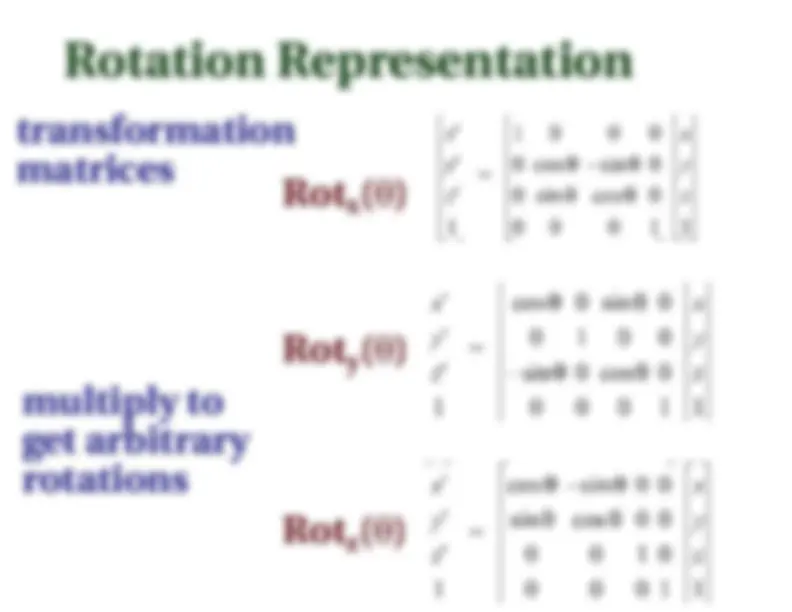
Keyframingbased on hand animation techniquessave time for the animatorforce explicit thought about timing
animator −> inbetweener −> inkerSnow White:$100/week −> $35/week −> $25/week[vs. straightahead animation] simple interpolation !=intelligence/judgment of inbetweener
Keyframing ugly motion (as Alan showed!)F/m = a = d
2 x(t)/dt
2 => C
2 continuous
x(t) position of ballSplines for interpolation
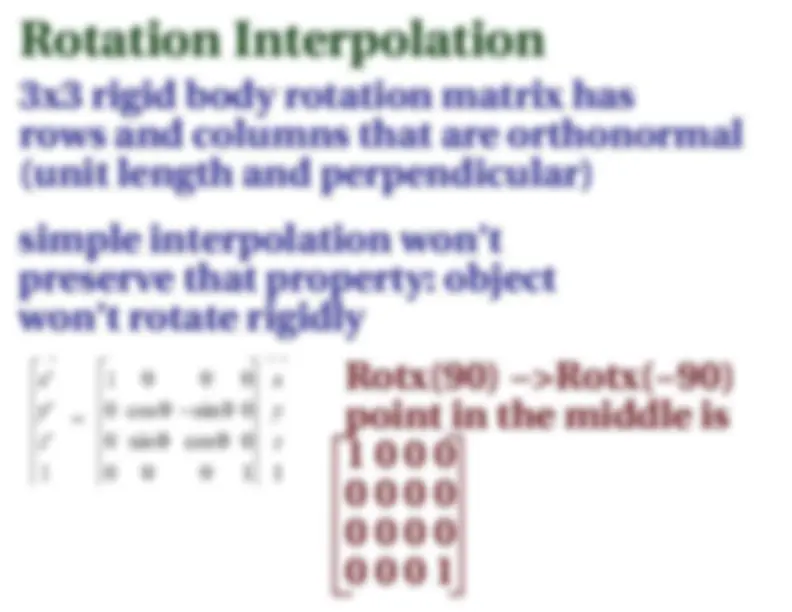
Rotation Interpolation3x3 rigid body rotation matrix hasrows and columns that are orthonormal(unit length and perpendicular)
Rotx(90) −>Rotx(−90)point in the middle is1 0 0 00 0 0 00 0 0 00 0 0 1
simple interpolation won’tpreserve that property: objectwon’t rotate rigidly
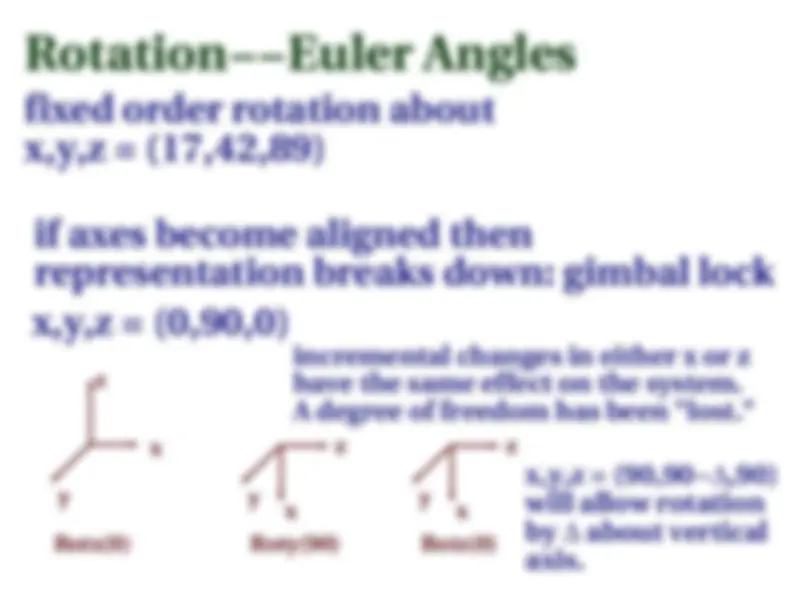
Rotation−−Euler Anglesfixed order rotation aboutx,y,z = (17,42,89)if axes become aligned thenrepresentation breaks down: gimbal lockx,y,z = (0,90,0)
incremental changes in either x or zhave the same effect on the system.A degree of freedom has been "lost."
z x y Rotx(0)
z yx Roty(90)
z yx Rotz(0) x,y,z = (90,90−
∆,90)
will allow rotationby^ ∆^
about vertical axis.
angle and axis (x,y,z)[sin(
θ/2)(x,y,z), cos(
θ/2)]
Axis/Angle or Quaternions