


B.B. Karki, LSU
0.1
CSC 3102
Algorithm Design Techniques
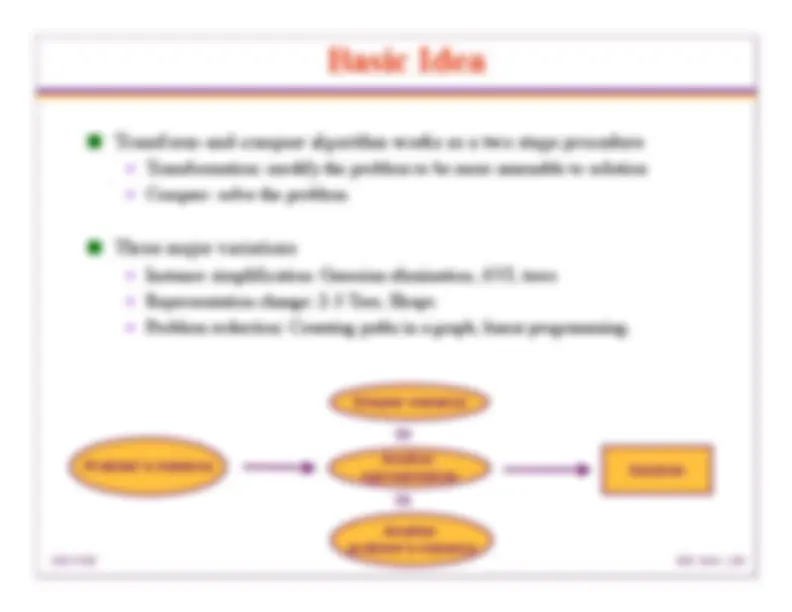
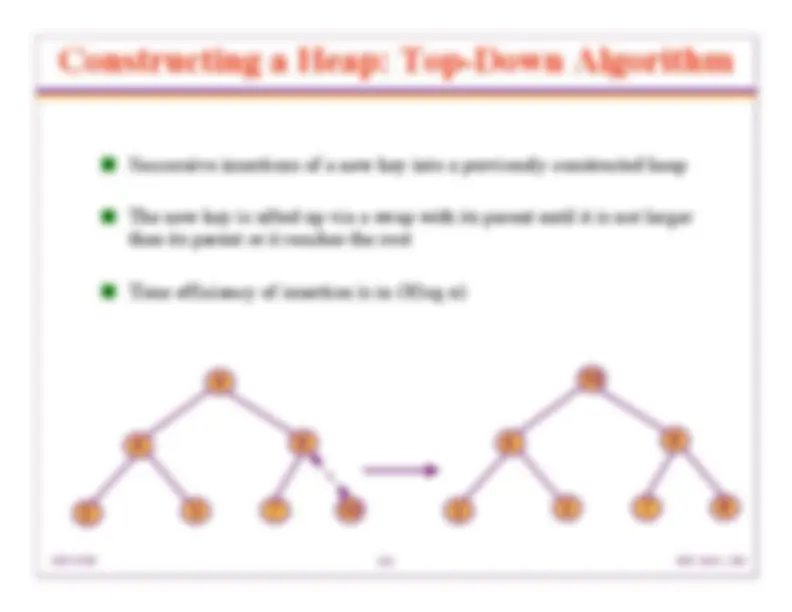
Brute force
Divide-and-conquer
Decrease-and-conquer
Transform-and-conquer
Space-and-time tradeoffs
Dynamic programming
Greedy techniques

Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
An in-depth look into two important algorithm design techniques: gaussian elimination and heaps. The former is a method for solving systems of linear equations, while the latter is a data structure used for maintaining a max-heap. The basic ideas, variations, and implementations of gaussian elimination, including gaussian elimination algorithm and upper triangular matrix coefficient. Additionally, it discusses heaps, their properties, and construction algorithms (bottom-up and top-down).
Typology: Study notes
1 / 17

This page cannot be seen from the preview
Don't miss anything!
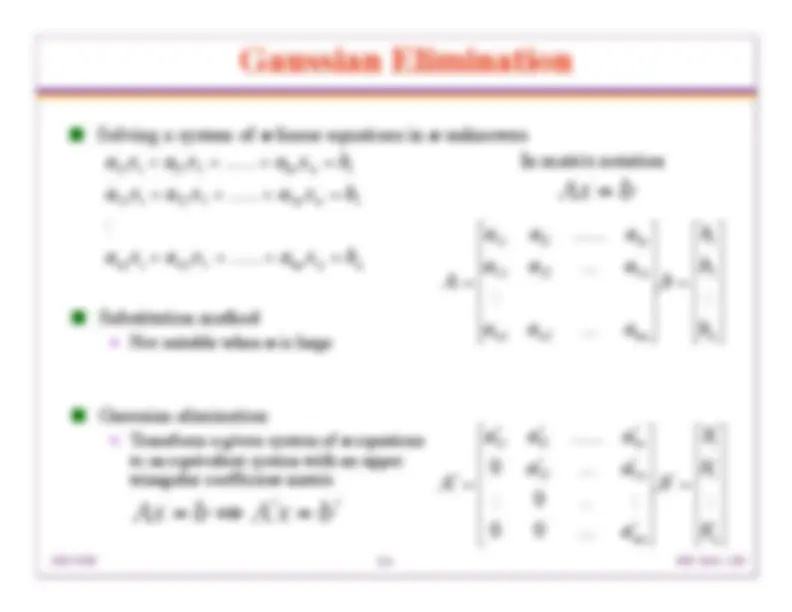
Solving a system of n linear equations in n unknowns
n 1
1
n 2
2
nn
n
n Substitution method Not suitable when n is large Gaussian elimination Transform a given system of n equations to an equivalent system with an upper triangular coefficient matrix € Ax = b In matrix notation
Ax = b ⇒ A ′ x = b ′
11
1 n
nn
1
2
n
A series of elementary operations Exchanging two equations of the system Replacing an equation with its nonzero multiple Replacing an equation with a sum or difference of this equation and some multiple of another equation Elementary operation does not change a solution to a system Normal pivoting Use aii as a pivot to make all xi coefficients zeros in the equations below i th one. Partial pivoting Choose a row with the largest absolute value of the coefficient in the i th column
A heap is a binary tree satisfying two conditions Shape requirement: The tree is complete so that all its levels are full except that only some rightmost leaves may be missing The height of the tree is h = log 2 n Parental dominance: The key at each node is greater than or equal to the keys at its children The root always contains the largest element Keys are ordered top down A node of a heap considered with all its descendants is also a heap. Implementation as an array H [1…. n ]: H [ i ] ≥ max{ H [2 i ], H [2 i + 1]} for i = 1, … n /2 Parental node keys: first n /2 positions Leaf keys: last n /2 positions **5 7 4 2 10 1 Index 0 1 2 3 4 5 6
Values 10 5 7 4 2 1 parents leaves**
CSC 3102 0.8 B.B. Karki, LSU
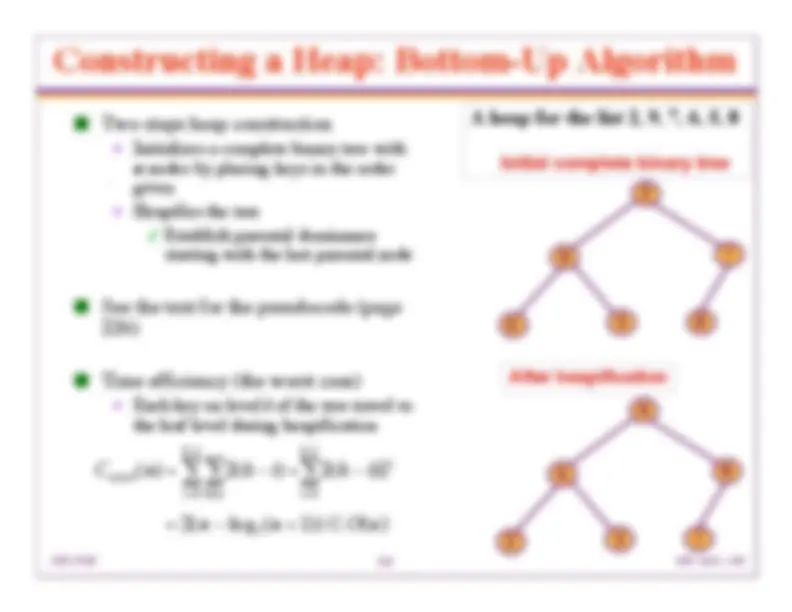
Two-steps heap construction Initializes a complete binary tree with n nodes by placing keys in the order given Heapifies the tree Establish parental dominance starting with the last parental node See the text for the pseudocode (page
Time efficiency (the worst case) Each key on level i of the tree travel to the leaf level during heapification 9 7 6 5 2 8 6 8 2 5 9 7 After heapification A heap for the list 2, 9, 7, 6, 5, 8 Initial complete binary tree € Cworst ( n ) = 2 ( h − i ) = keys ∑ i = 0 h − 1 ∑ 2 ( h^ −^ i ) i i = 0 h − 1 ∑
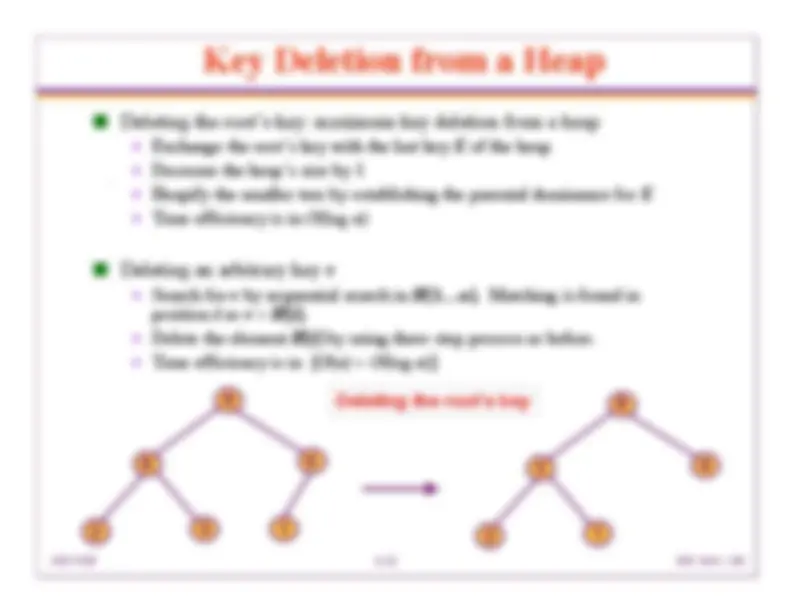
Deleting the root’s key: maximum key deletion from a heap Exchange the root’s key with the last key K of the heap Decrease the heap’s size by 1 Heapify the smaller tree by establishing the parental dominance for K Time efficiency is in O (log n ) Deleting an arbitrary key v Search for v by sequential search in H [1… n ]. Matching is found in position i so v = H [ i ]. Delete the element H [ i ] by using three-step process as before. Time efficiency is in [ O ( n ) + O (log n )] 8 6 2 5 9 1 5 6 2 1 Deleting the root’s key 8
A two-stage sorting algorithm Stage 1 Heap construction: Construct a heap for a given array Stage 2 Maximum deletions: Apply the root-deletion operation n -1 times to the remaining heap The array elements are eliminated in decreasing order and are placed in a new array in ascending order Sort the array 2, 9, 7, 6, 5, 8 by heapsort Stage 1 Stage 2 2 9 7 6 5 8 9 6 8 2 5 7 2 9 8 6 5 7 7 6 8 2 5 | 9 2 9 8 6 5 7 8 6 7 2 5 9 2 8 6 5 7 5 6 7 2 | 8 9 6 8 2 5 7 ……. 5 2 2 | 5 2
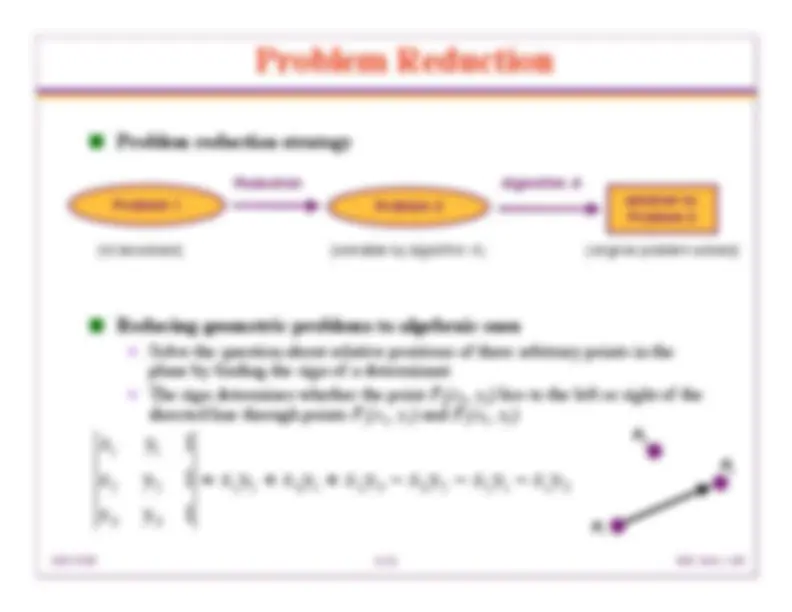
Problem reduction strategy Reducing geometric problems to algebraic ones Solve the question about relative positions of three arbitrary points in the plane by finding the sign of a determinant The sign determines whether the point P 3 ( x 3 , y 3 ) lies to the left or right of the directed line through points P 1 ( x 1 , y 1 ) and P 2 ( x 2 , y 2 )
1
1
2
2
3
3
1
2
3
1
2
3
3
2
2
1
1
3 Problem (^1) Problem 2 solution^ to Problem 2 Reduction Algorithm A (to be solved) (solvable by algorithm A) (original problem solved) P 3 P 2 P 1
Compute the least common multiple ( lcm ) of two integers, m and n , by solving the problem gcd (greatest common divisor) Efficient algorithm (Euclid’s algorithm) exists for finding gcd Apply repeatedly the equality gcd( m,n ) = gcd( n,m mod n ) until m mod n is 0. The last value of m is the gcd.
Reduce a minimization problem to a maximization problem To minimize a function, we can maximize its negative instead, and change the sign of the answer: Opposite is also true: Can be generalized to the case of function optimization. € min f ( x ) = −max[− f ( x )]
-f( x) f( x) x* f( x) -f( x)
CSC 3102 0.17 B.B. Karki, LSU
A problem of optimizing a linear function of several variables subject to constraints in the form of linear equations and linear inequalities. Solve the knapsack problem by reducing it to an instance of linear programming problem € v (^) j x (^) j j = 1 n ∑ w (^) j x (^) j ≤ W j = 1 n ∑
maximize subject to for j = 1, …. n