


Lecture 8
consensus 1:
distributed systems
CS425 / ECE 428 / CSE 424
sayan mitra






Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
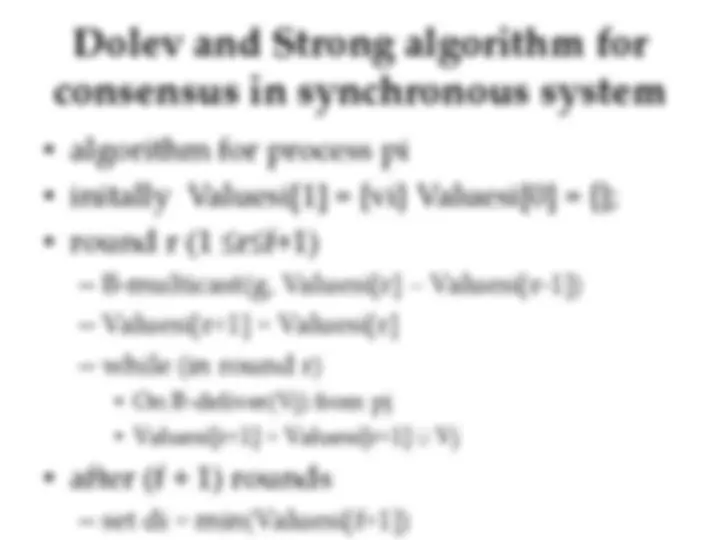
Various failure models in distributed systems and consensus algorithms to ensure agreement and integrity among processes. Topics include crash, omission, transient, and byzantine failures, as well as consensus algorithms like consensus (c), byzantine generals (bg), and interactive consistency (ic). The document also explores solving consensus using reliable multicast and the dolev and strong algorithm.
Typology: Study notes
1 / 13

This page cannot be seen from the preview
Don't miss anything!
delivered by RTO-multicast
the case where upto f processes crash
synchronous message passing model