


Presented By Ryan Amundsen and Paritosh Gupta
University of Michigan
EECS 598







Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
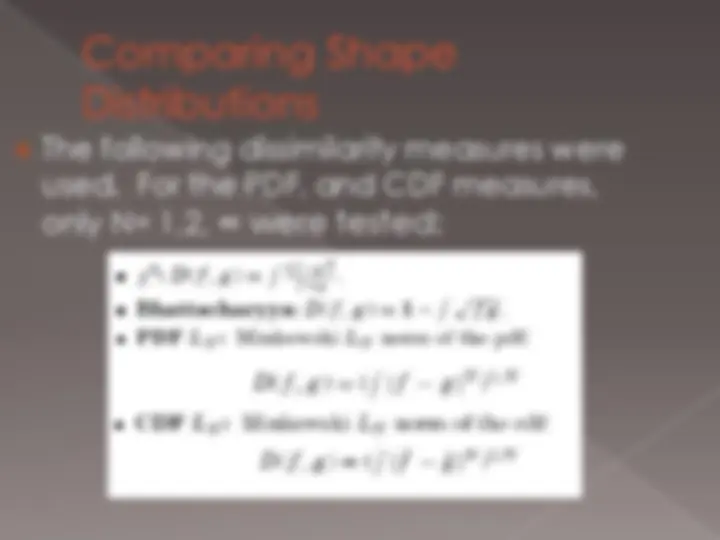
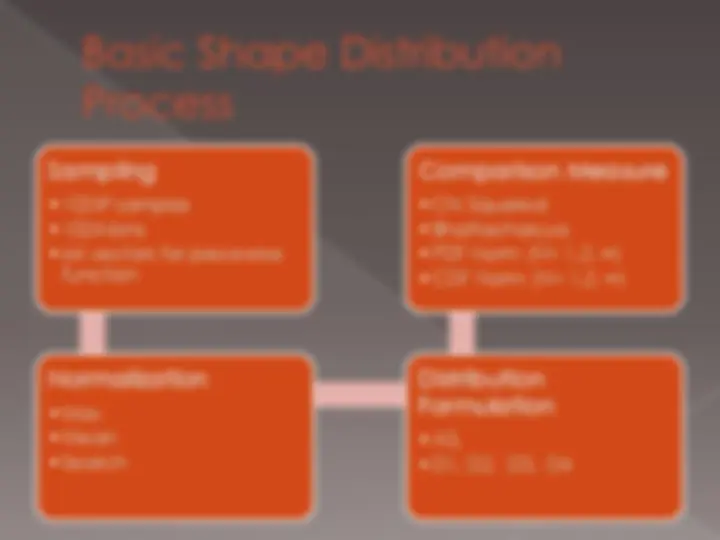
This document, presented by ryan amundsen and paritosh gupta at the university of michigan in eecs 598, discusses the importance of 3d shape similarity in various fields such as computer vision, mechanical engineering, and molecular biology. It explores the challenges of comparing 3d models due to different file formats, scanning tools, inconsistencies in tagging, and missing or overlapping polygons. The authors propose representing the shape signature of a 3d model as a probability distribution sampled from a shape function. They introduce several distance measures, including a3 and d1-d4, and discuss their invariance, robustness, and metric properties. The document also covers efficiency, generality, and the use of histograms and piecewise linear functions to represent distributions.
Typology: Study notes
1 / 34

This page cannot be seen from the preview
Don't miss anything!
Presented By Ryan Amundsen and Paritosh Gupta University of Michigan EECS 598
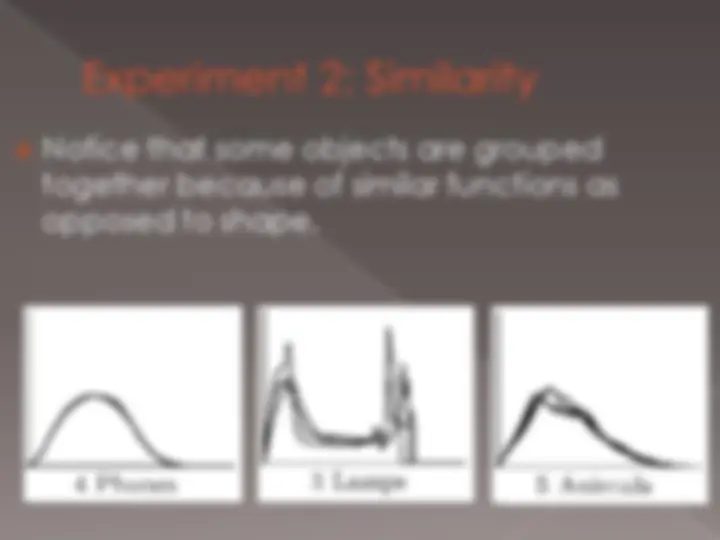
› Recognition, retrieval, clustering, and classification › Computer Vision, Mechanical Engineering, and Molecular Biology
› Improved Modeling Tools › World Wide Web spreads availability of 3D models › Hardware and CPU’s are getting faster
Current Issues
› Different file formats
› Different scanning tools
› Inconsistencies in tagging
› Missing, intersecting, or Overlapping Polygons
› More Complex Parameters
› Pose recognition more difficult
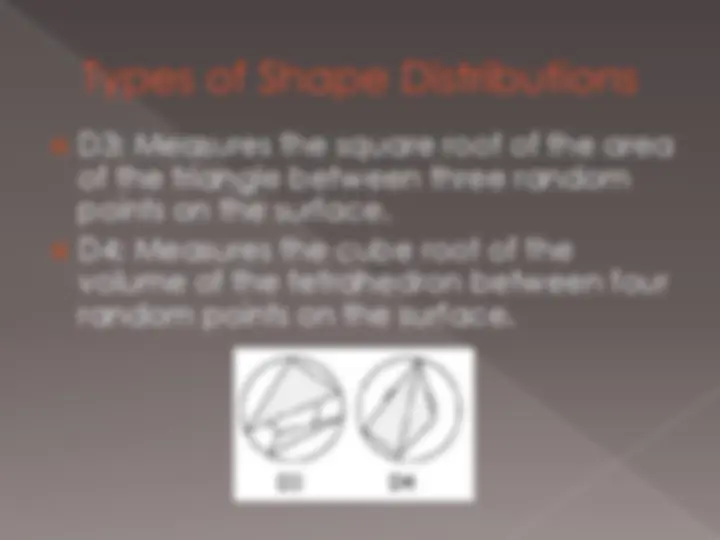
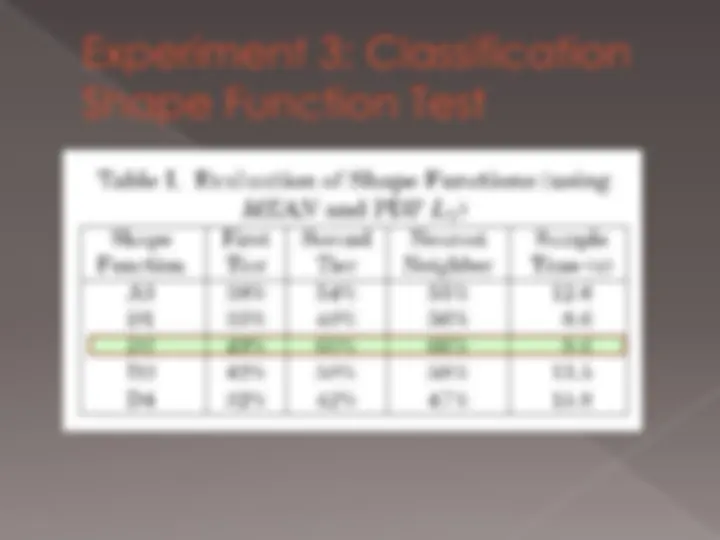
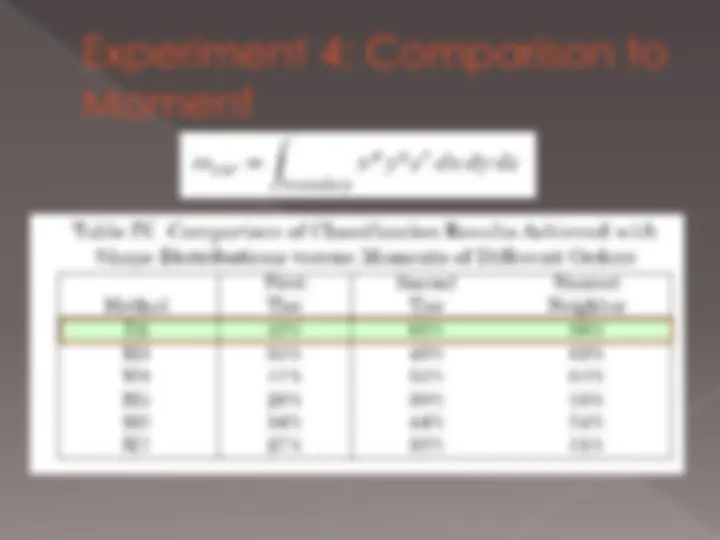
D3: Measures the square root of the area
of the triangle between three random points on the surface.
D4: Measures the cube root of the
volume of the tetrahedron between four random points on the surface.
Invariance › D2: Rigid motions, mirror imaging with normalization, scaling, rotation › A3: Scaling always invariant Robustness › Insensitivity to small perturbations Noise Blur Cracks Dust Metric › If the distance measure is a metric, then so will be dissimilarity measure Efficiency - see in results Generality – independence of color, general for method stored,
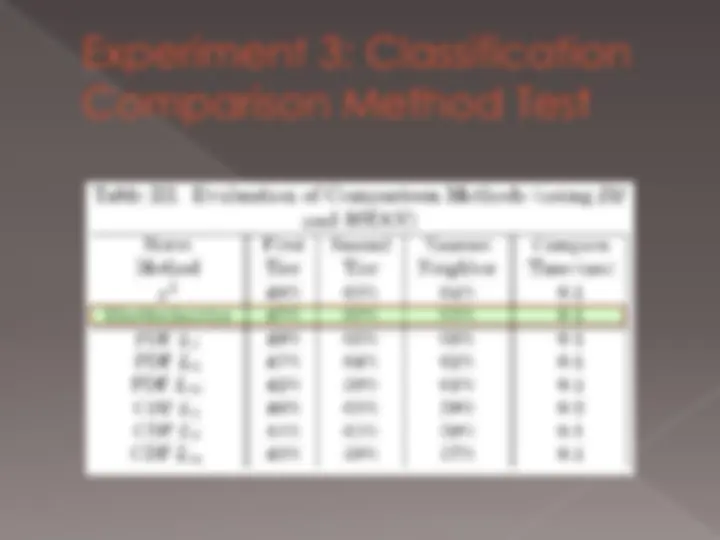
Align maximum magnitudes
Align mean magnitudes
Search for most similar scale constant
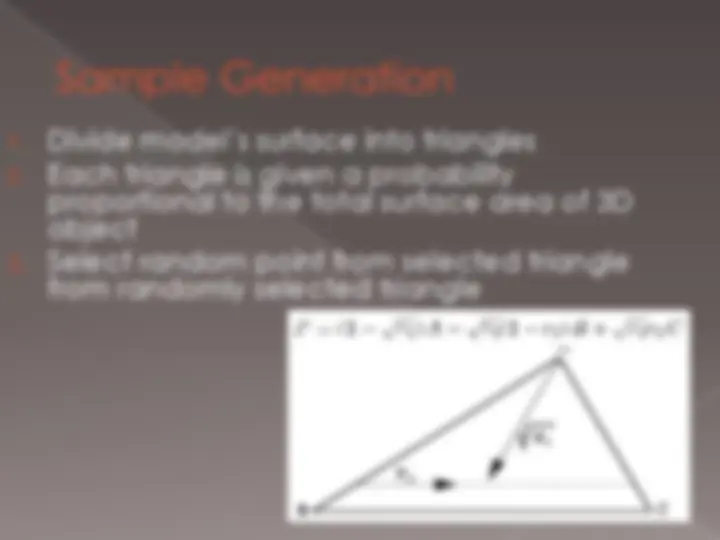
proportional to the total surface area of 3D object
from randomly selected triangle
Coded in C++
3D Models used composed of
independent polygons
Contained between 20 to 186,
polygons (average = 7000)
Most models contained cracks, self-
intersections, missing polygons
Experiments were run on a PC with 400
MHz Pentium II Processor and 256MB of memory
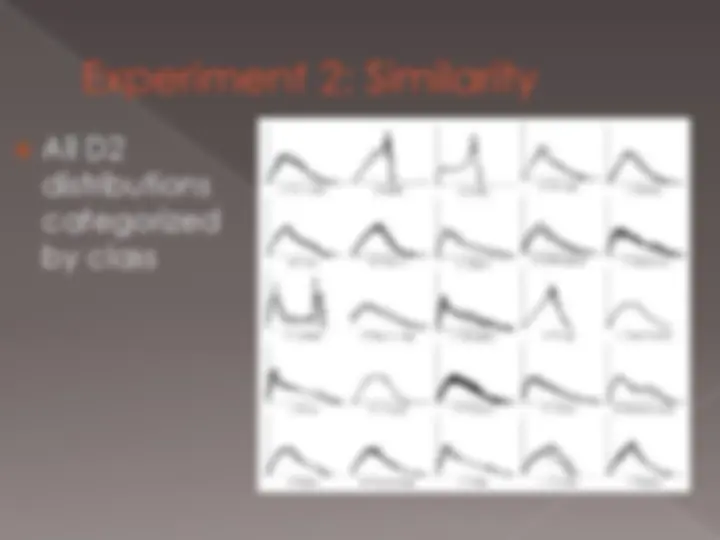
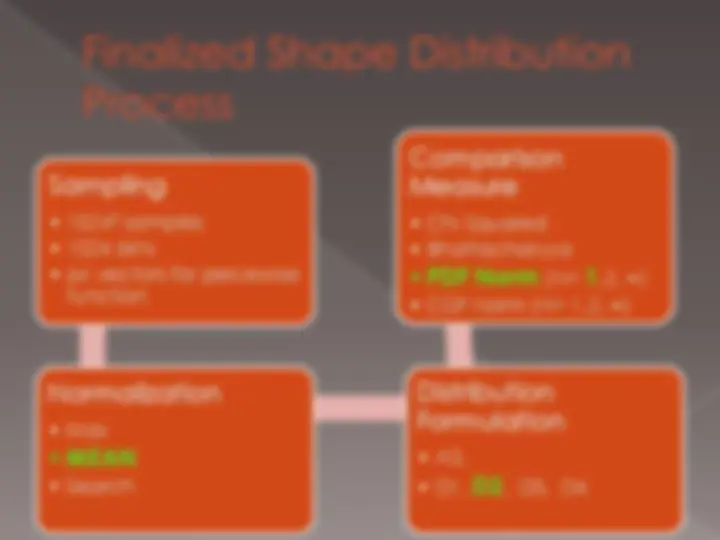
D2 shape function, MEAN normalization
method, PDF L1 norm
10 models
8 Transformations
90 model library (including original model)
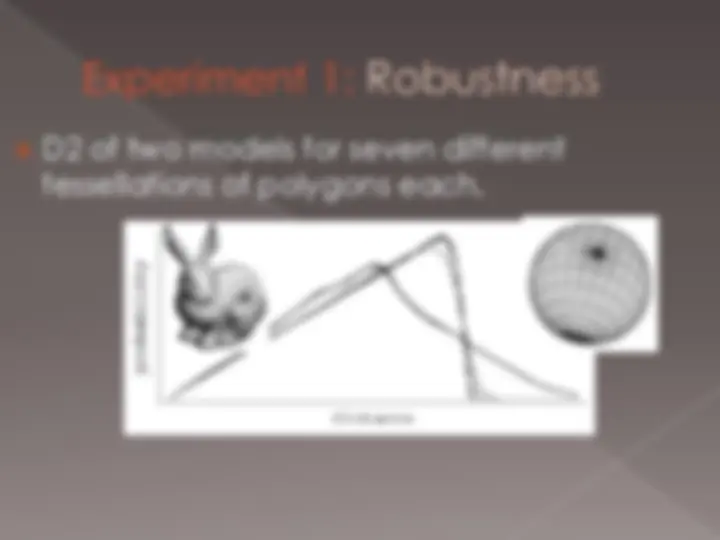
D2 of two models for seven different
tessellations of polygons each.