


Tracking









Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
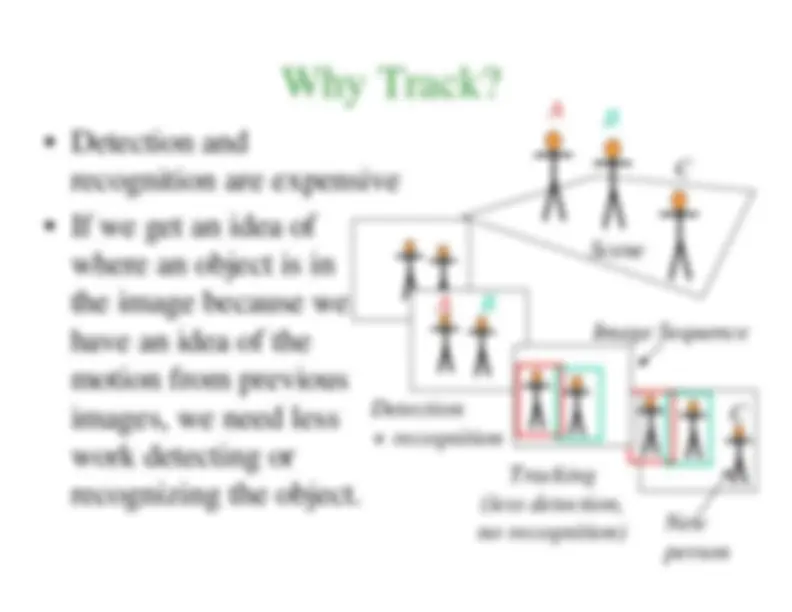
The concept of tracking in computer vision, which involves generating conclusions about the motion of objects or the camera based on a sequence of images. The benefits of tracking include reduced detection and recognition costs and improved real-time performance. Various aspects of tracking, including silhouette tracking, recursive methods, and least square estimation.
Typology: Study notes
1 / 26

This page cannot be seen from the preview
Don't miss anything!
pedestrians in real time is important.
the observations
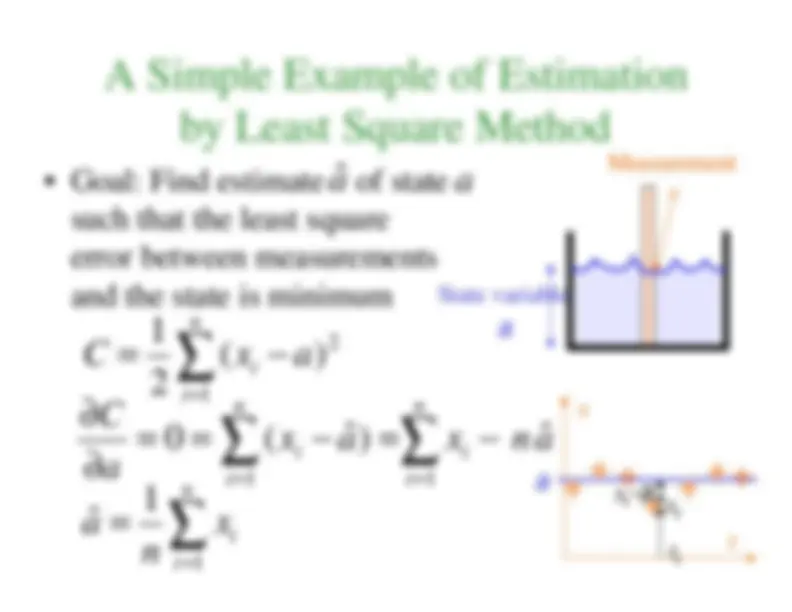
State variable a
such that the least square error between measurements and the state is minimum
a ˆ
n
i
C xi a 1
2 ( ) 2
∑ ∑ = =
∂ n
i
i
n
i
xi a x na a
1 1
n
i
xi n
a 1
a
Measurement x
x
t
x i
a (^) x i -a
t i
all data have been collected to get an estimate of the depth
old data when we make a new measurement
step i are obtained from data at step i - 1
a ˆ
State variable a
Measurement x
x
t
a
x i
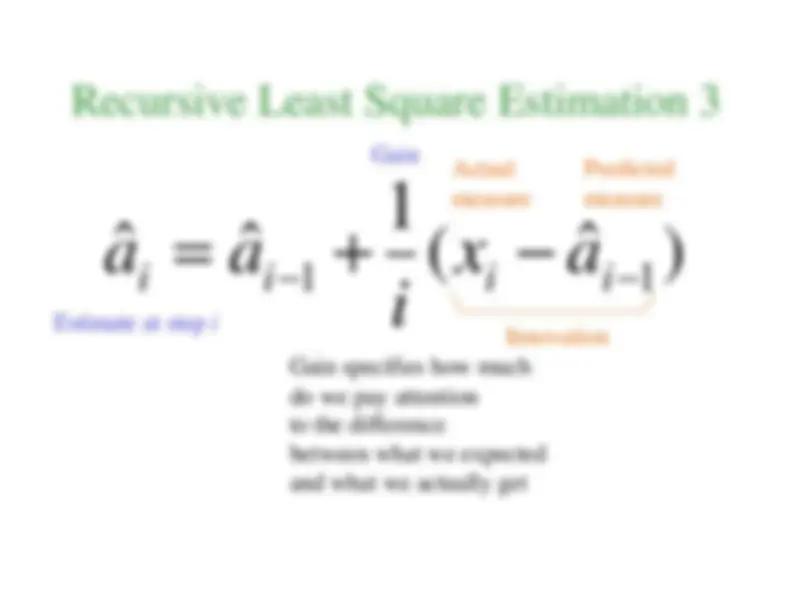
a^ ˆ^ i (^) − 1 i a ˆ
Estimate at step i
Predicted measure
Innovation
Gain (^) Actual measure
Gain specifies how much do we pay attention to the difference between what we expected and what we actually get
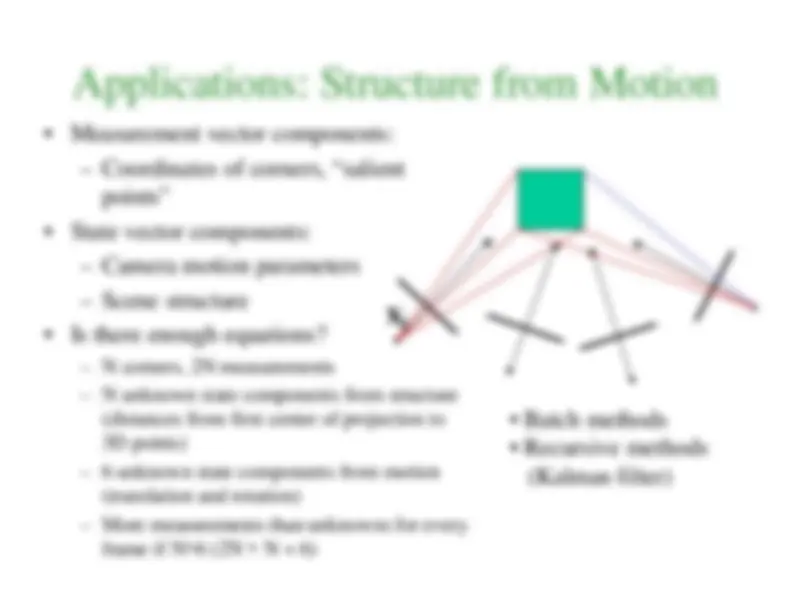
1. Batch method
a
H 1 H i
H 2
x 1
xi
x 2
xi = H (^) i ⋅ a a
H
H
H
=
⇒
xn n
x
x
... ...
2
1 2
1
⇒ x = H a
measurement equation
a (H H) H X
T − 1 T ˆ =
Find estimate (^) a ˆ that minimizes
(X Ha) (X H a)
T = − − 2
We find
i
i
i
i
A
a
A A w x i
V V A t
X X V t
i i
i i i
i i i
= +
= + ∆
= + ∆
−
− −
− −
1
1 1
1 1
∆
−
−
−
A w
V
X t
t
A
V
X
i
i
i
i
i
i 0
0
0 0 1
0 1
1 0
1
1
1
State of rocket
Measurement
⇒ a (^) i = Φ ai-1 + w
A
V
X x
i
i
i i +
= (^1 00) ⇒ xi = Hai + V
State equation for rocket
Measurement equation
Noise
Tweak factor
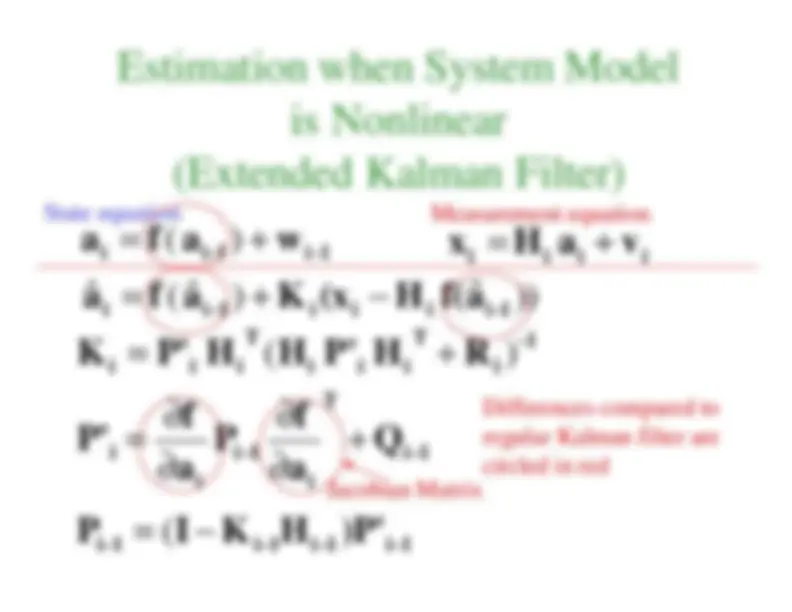
a ˆ^ (^) i = Φ i a ˆ i-1 + Ki(xi − Hi Φ ia ˆ i-1 )
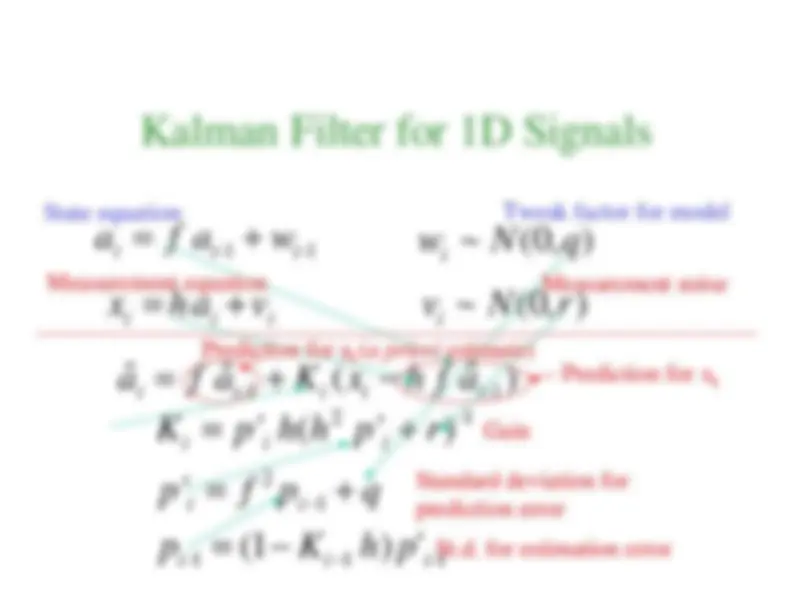
a (^) i = Φ i ai-1 + wi -
x (^) i = Hi ai + v i
w (^) i ~ N ( 0 , Qi )
v (^) i ~ N ( 0 , Ri )
i-1 i-1 i-1 i -
i-
T i i i-1 i
- i
T i i i
T i i i
State equation
Measurement equation
Tweak factor for model
Measurement noise
Prediction for xi
Prediction for a i
Gain Covariance matrix for prediction error Covariance for estimation error
previous step and dynamic model
of next measurements using measurement model and uncertainties
predicted regions
Measurement^ (u, v)
Prediction region
Φ ia ˆ i -
N ( H (^) i Φ ia ˆ i-1 , P'i )
a ˆ^ (^) i = Φ i a ˆ i-1 + Ki(xi − Hi Φ ia ˆ i-1 ) “Correction” of predicted state
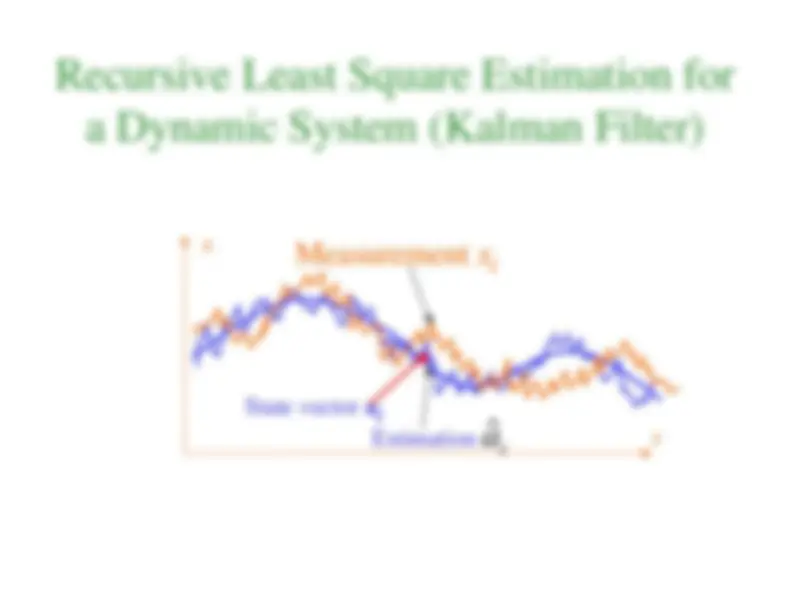
x
t
Measurement x i
State vector a i Estimation (^) a ˆ i