



Perform Analysis Report




































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
report on hydraulic lifter back of trailer
Typology: Assignments
1 / 62

This page cannot be seen from the preview
Don't miss anything!
Figure 3-49 r
1.0 ABSTRACT
Initial design procedure was carried using hand calculation and kinematic solid model. Results were validated,
and design was optimized using SolidWorks and Ansys Simulations. After studying and observing the various
side loaders and their mechanisms a kinematic diagram was drawn to minimize the overall system weight and
minimize the hydraulic cylinder forces. Kinematic model was dimensioned considering the height, width,
horizontal distance of the container and strokes length of the hydraulic cylinders. According to the kinematic
diagram, various loading and unloading scenarios of the container were considered and the traveling paths of
the container were identified. According to the identified paths some positions were taken into consideration
and that positions were used to locate the angles of the kinematic solid model. R 1
and R 2
were calculated using
hand calculations and MS. Excel work sheets. After first iteration results hydraulic cylinders were searched and
found that the column load of the cylinder is depend on the bore size, stroke length and the working pressure
of the cylinder. So, for higher column loads working pressure or bore size must be increased and working
pressure is limited due to the power requirements of the hydraulic pump. Increasing the bore size will increase
the hydraulic cylinder size and weight. Increase of the stroke length will reduce the column load. In order to
minimize the R 1
and R 2
, minimize the total weight of the system, minimize the stroke lengths, and minimize
the stowed lengths of the arms kinematic model dimensions were changed and again angles were located and
calculated the R 1
and R 2
. About 14 iterations were done to finalize the dimensions of the modal.
During the calculations found out that R 1
and R 2
will be higher when increasing the distance from the trailer
deck to loading platform and height difference between the trailer deck and loading plat form. These results
were obtained during the finalization of kinematic modal dimensions.
A shear force and bending moments analysis of the side loader arms was carried out to find the paths and
points that are experiencing maximum shear force and maximum bending moments by the side loader arms.
Then design was improved to minimize the bending moments in arms.
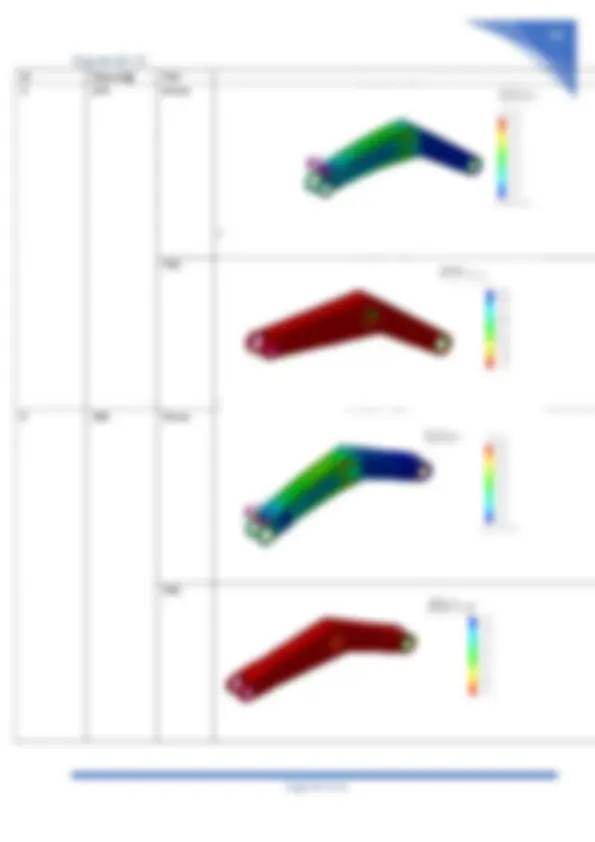
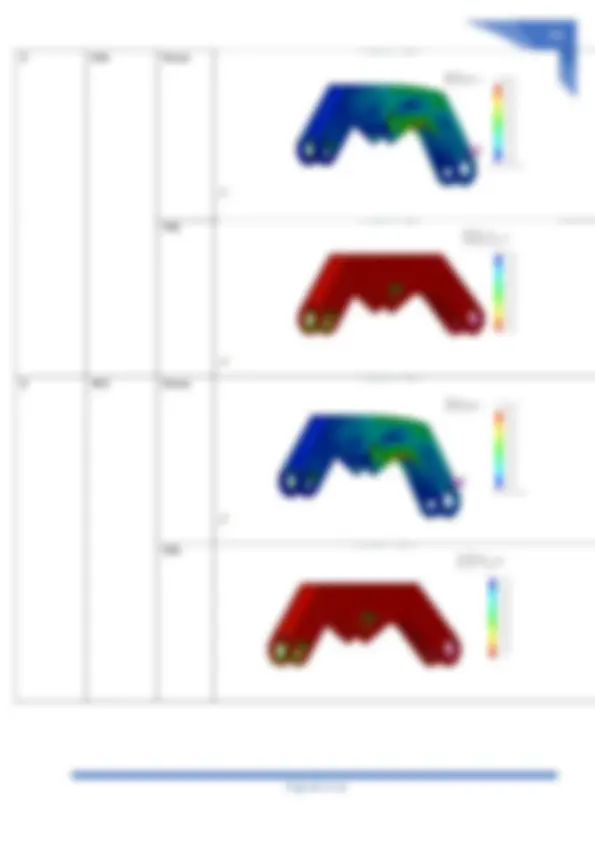
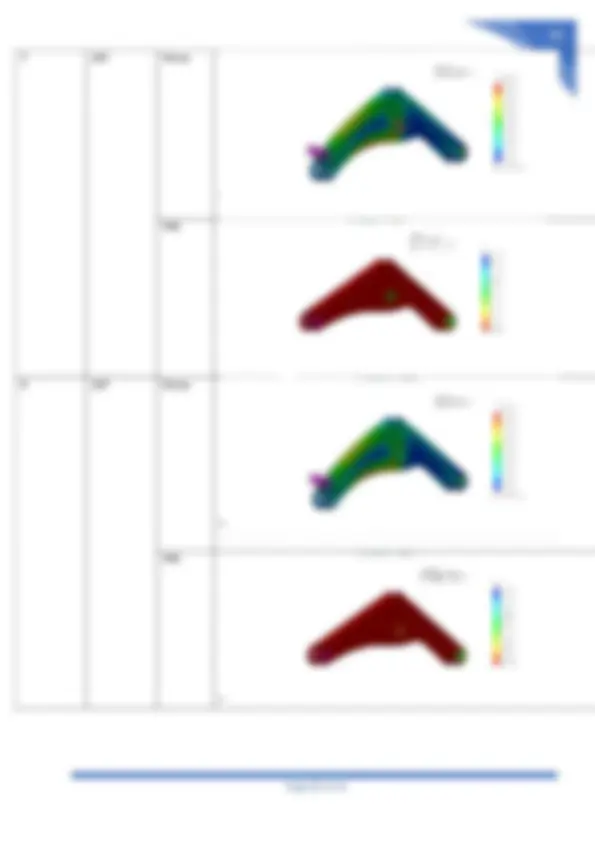
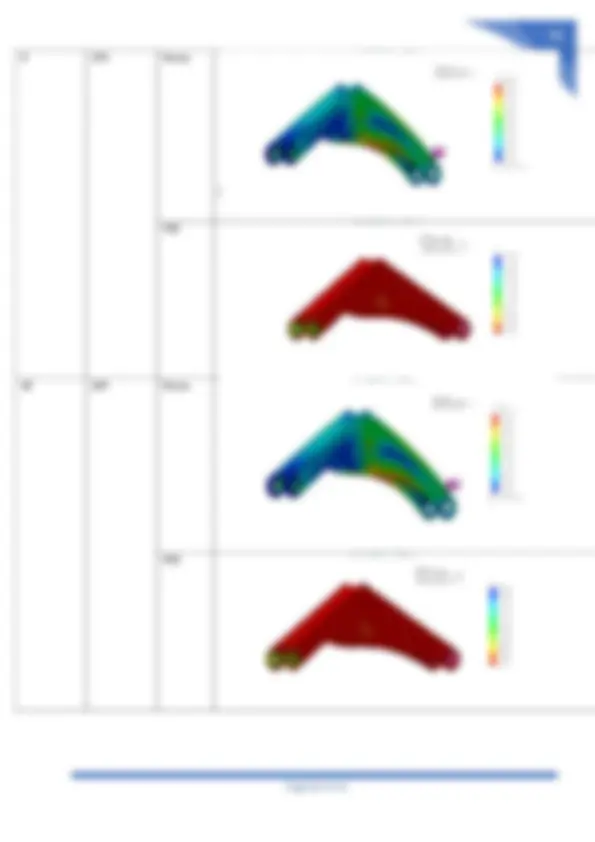
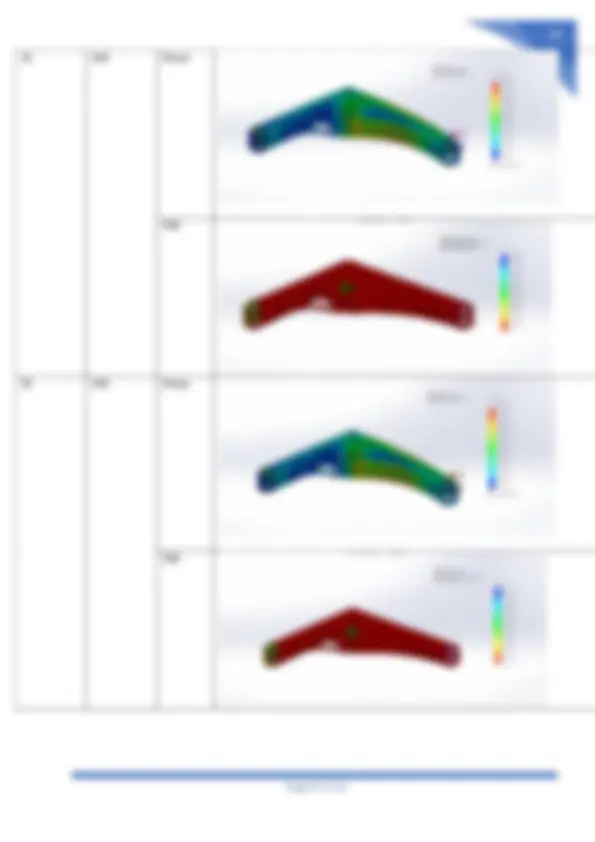
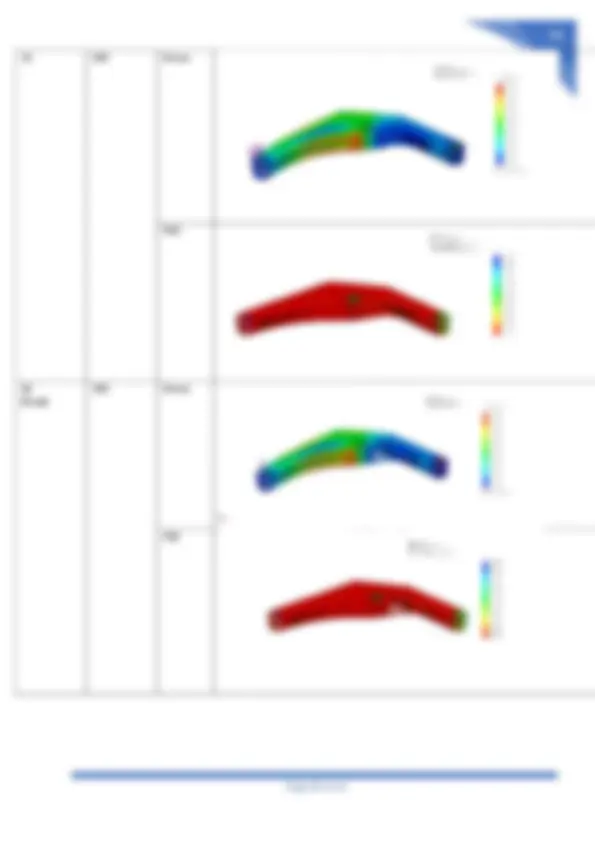
According to the final results two arms, stabilizer arm and base were initial simulations were done using the
SolidWorks and final simulation was done by Ansys. According to analysis results models were improved
iterative manner while checking the key requirements had been satisfied. Reduction in weight and reducing
the stress concentration were achieved.
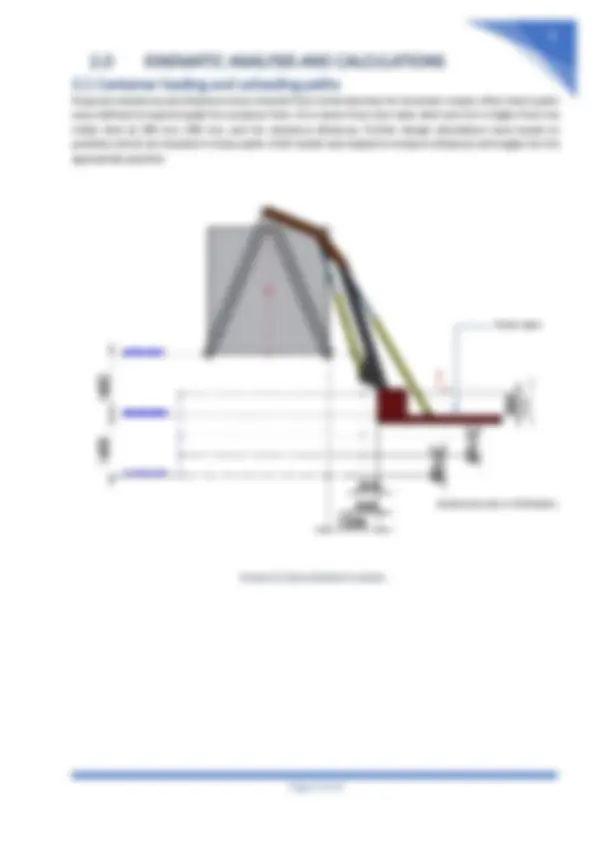
2.0 KINEMATIC ANALYSIS AND CALCULATIONS
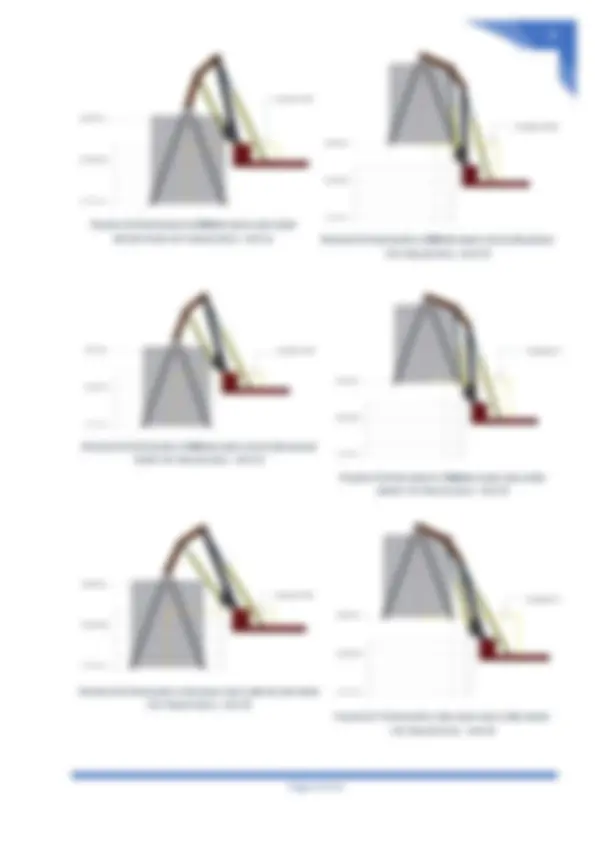
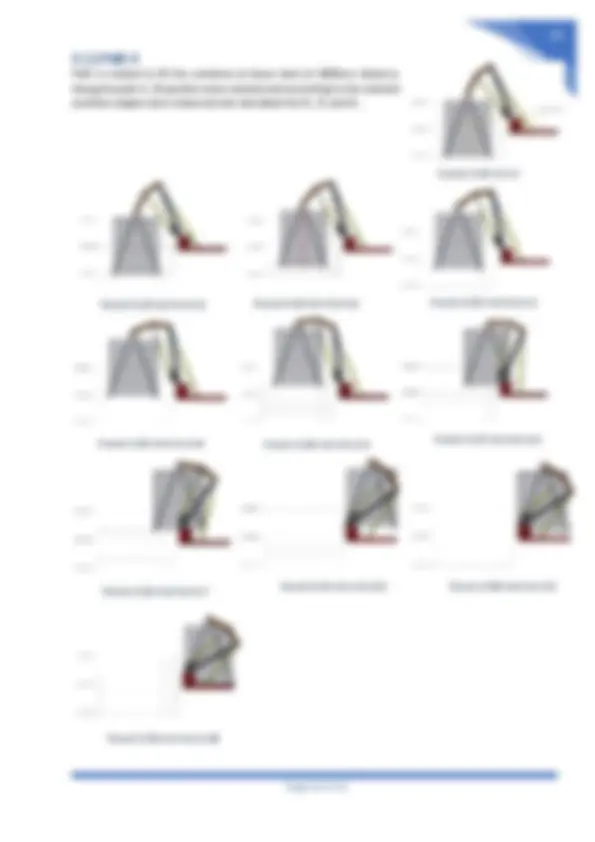
Required clearances and distances were checked from initial sketches for kinematic model. After that 6 paths
were defined to load (unload) the container from 1.4 m lower from the trailer deck and 1.4 m higher from the
trailer deck at 300 mm, 500 mm, and 1m clearance distances. Further design calculations were based on
positions which are situated in those paths. Solid model was helped to measure distances and angles for the
appropriate position.
Trailer Deck
Dimensions are in millimeters
Initially cylinder forces and reaction forces were found. Then Bending moments for the boom and V rod was
calculated. Pins at linkages also calculated with their failure scenarios. Following assumptions were made while
calculating the forces.
All hinges are smooth. (No Friction force)
Weights of the rods were not included.
At each position system was in static equilibrium.
Direction of forces were taken as arbitrary
directions except for the load (W). Angles of
R1 and R2 taken from the kinematic model
since they are cylinder forces. Negative
forces may indicate at results if the taken
force direction opposite to actual one.
Angles α, δ, ϒ and β were obtained through
the kinematic model for each position.
1
sin
𝛿 + 𝛾 − 180
2
cos
𝛿 + 𝛾 − 180
− 𝑙
3
sin(𝛾 − 90 )
Consider ABC,
𝐶
𝑅
1
sin(𝛼) 𝑙
2
sin(𝛿 + 𝛾 − 180 ) − 𝑅
1
cos(𝛼) 𝑙
2
cos(𝛿 + 𝛾 − 180 ) + 𝑊[𝑙
2
cos(𝛿 + 𝛾 − 180 ) + 𝑙
1
sin(𝛿 + 𝛾 − 120 )] = 0
𝑅
1
=
𝑊[−𝑙
2
cos(𝛿 + 𝛾) + 𝑙
1
(sin(𝛿 + 𝛾)cos( 120 ) − cos(𝛿 + 𝛾)sin( 120 ))]
− cos
( 𝛼
) 𝑙
2
𝑐𝑜𝑠
( 𝛿 + 𝛾
)
( 𝛼
) 𝑙
2
𝑠𝑖𝑛
( 𝛿 + 𝛾
)
𝑅
1
= −
𝑊 [𝑙
2
𝑙
1
2
⁄ (tan(𝛿 + 𝛾) + √
3 )]
𝑙
2
cos
( 𝛼
)[ tan
( 𝛼
) tan
( 𝛿 + 𝛾
) − 1
]
Consider the whole system,
𝐷
𝑊𝑥 = −𝑅
2
[𝑙
3
cos(𝛽) cos(𝛾 − 90 ) + 𝑙
3
sin(𝛽) sin(𝛾 − 90 )]
𝑅
2
=
𝑊𝑥
𝑙
3
(𝑙
3
cos
( 𝛽
) cos
( 𝛾 − 90
)
3
sin
( 𝛽
) sin
( 𝛾 − 90
) )
Considering ABC rod,
4
1
. Sin( 𝛿 + 𝛾 − 120 )
5
2
6
3
𝑥
1
1
𝑦
1
1
1
1
Considering ABC and CD rod,
𝑦
2
2
2
2
𝑥
2
2
For point A,
By Sin rule
1
3
𝑆𝑖𝑛( 90 + ε)
4
3
1
. 𝑆𝑖𝑛( 90 + ε)
4
1
8
9
𝑇𝑎𝑛ε =
9
0 < x < l 10
𝑦
2
2
2
2
𝐷
α
α
y
y
x
x
y
y
x
x
x2.Cos(ϒ-90) –
y1.Cos(180-ϒ)
x2.Cos(ϒ-90) –
y1.Cos(180-ϒ)
R1.Sin(α+ϒ-90)
R1.Sin(α+ϒ-90)
y3.Sin(ϒ-90) –
x3.Sin(180-ϒ)
y3.Sin(ϒ-90) –
x3.Sin(180-ϒ)
x
x
x2.Cos(ϒ-90) –
y1.Cos(180-ϒ)
x2.Cos(ϒ-90) –
y1.Cos(180-ϒ)
0 < x < l 1
𝑦
𝐴
l 1
< x < l 1
+l 2
𝑦
1
1
𝐴
1
1
W.Sin(270-δ-ϒ)
W.Sin(270-δ-ϒ)
x
x
W.Sin(270-δ-ϒ)
W.Sin(270-δ-ϒ)
R1.Sin(270-α-δ-ϒ)
R1.Sin(270-α-δ-ϒ)
x
x
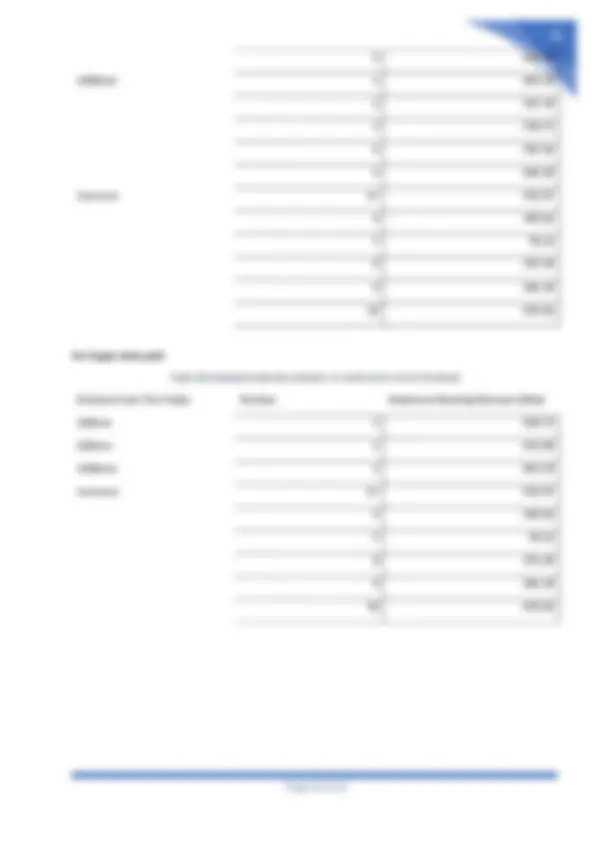
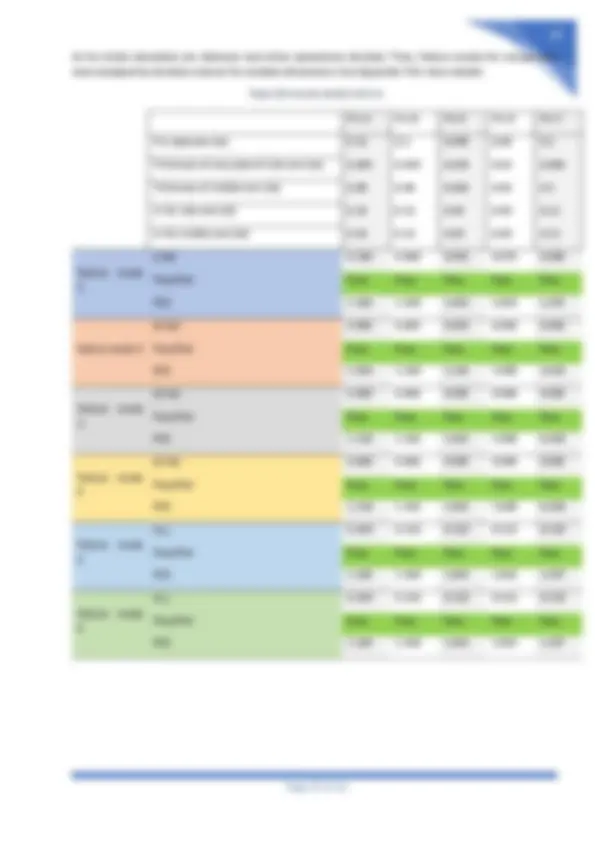
All the pins are subjected to double shear. Pin locations are shown in following figure.
Pin diameter, thickness of one plate of a side arm and thickness of middle arm
are calculated following manner. Minimum pin diameter is calculated
considering the pin shear strength (to avoid shearing of the pin). Then
according to that diameter thickness of side arm and middle arm were
calculated (to avoid crushing of the plates). Then again pins were analyzed
according to following failure modes.
Shearing of the pin
Crushing of the plates
Tearing of the plate at an edge
Crushing of the pin
For pin (Shearing of the pin-failure mode 1)
𝑎𝑙𝑙𝑜𝑤𝑎𝑏𝑙𝑒
2
𝑎𝑙𝑙𝑜𝑤𝑎𝑏𝑙𝑒
𝑎𝑙𝑙𝑜𝑤𝑎𝑏𝑙𝑒
FORCE
FORCE IN THE PIN
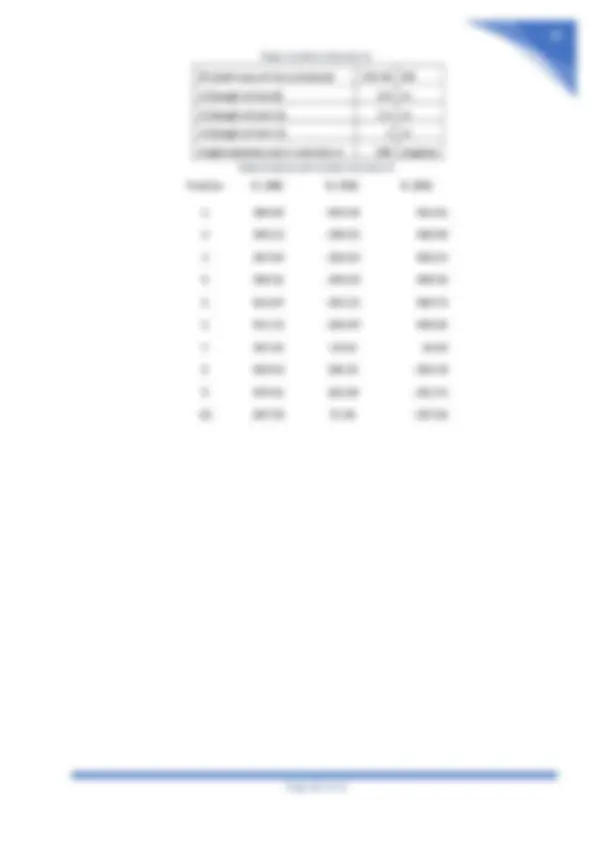
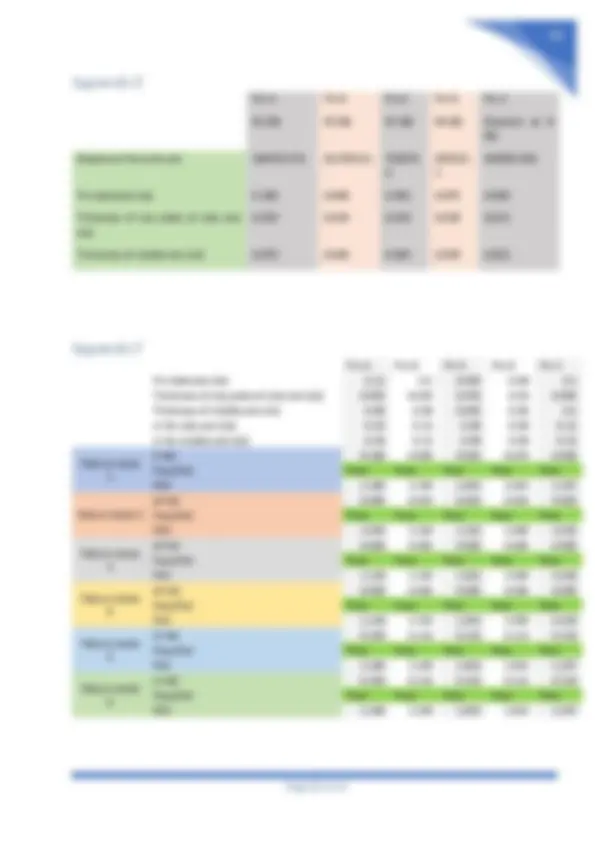
3.0 CALCULATION RESULTS AND DISCUSSION
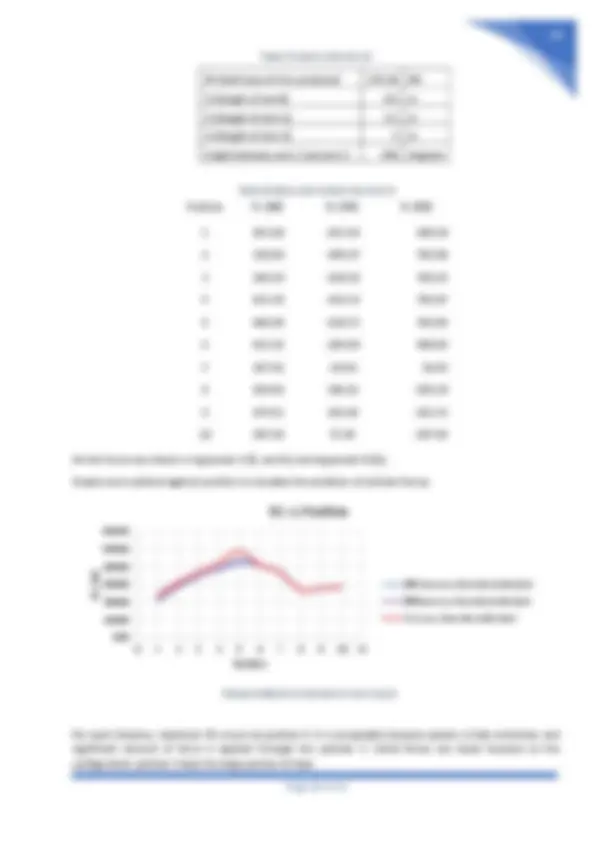
Path is created to lift the container at lower deck at 300mm distance.
Along the path 1, 10 position were selected and according to the selected
positions angles were measured and calculated the R 1
2
and R 3
W (half mass of the container) 176.58 KN
l2 (length of arm2) 0.9 m
l1 (length of arm 1) 1.1 m
l3 (length of arm 3) 3 m
Angle between arm 1 and arm 2 150 degrees
Position R 1
2
3