Download Matrix Calculations: Pivots, Echelon Form, and Data Fitting at Radboud University Nijmegen and more Cheat Sheet Linear Algebra in PDF only on Docsity!
Application: Data fitting Vectors and solutions Homogeneous systems Non-homogeneous systems
Radboud University Nijmegen
Matrix Calculations: Solutions of Systems of
Linear Equations
A. Kissinger (and H. Geuvers)
Institute for Computing and Information Sciences – Intelligent Systems Radboud University Nijmegen
Version: spring 2016
Application: Data fitting Vectors and solutions Homogeneous systems Non-homogeneous systems
Radboud University Nijmegen
Outline
Review: pivots and Echelon form
Application: Data fitting
Vectors and solutions
Homogeneous systems
Non-homogeneous systems
Application: Data fitting Vectors and solutions Homogeneous systems Non-homogeneous systems
Radboud University Nijmegen
Echelon form
A matrix is in Echelon form if:
1 All of the rows with pivots occur before zero rows, and
2 Pivots always occur to the right of previous pivots
X
3 2 5 − 5 1 0 0 2 1 − 2 0 0 0 0 0 0 0 0 -2 2
3 2 5 − 5 1 0 0 4 − 2 2
0 2 0 1 − 2 0 0 0 0 0
3 2 5 − 5 1 0 0 4 − 2 2
0 0 2 1 − 2 0 0 0 0 0
Application: Data fitting Vectors and solutions Homogeneous systems Non-homogeneous systems
Radboud University Nijmegen
Points and polynomials
Here’s a really useful thing about polynomials:
Theorem
For any n points in a plane, there exists a unique polynomial of
degree n − 1 which hits them all.
That is: given points (x 1 , y 1 ),... , (xn, yn), there is precisely one
‘polynomial’ function of the form:
f (x) = a 0 + a 1 x + a 2 x
2
3
n− 1
with f (xi ) = yi for all i ≤ n.
NB. No two points should be on the same vertical line!
- (^) The data fitting problem is: given the points (xi , yi ) obtained
from some experiment, find the a 0 ,... , an− 1
- (^) This can be done with what we have seen so far!
Application: Data fitting Vectors and solutions Homogeneous systems Non-homogeneous systems
Radboud University Nijmegen
Unique solutions
From the first lecture:
Theorem
A system of equations in n variables has a unique solution if and
only if its Echelon form has n pivots.
Example ( denotes a pivot)
x 1 + x 2 = 3
x 1 − x 2 = 1
gives
and
(using transformations R 2 := R 2 − R 1 and R 2 := −
1 2
R 2 )
Question: What if there are more solutions? Can we describe them
in a generic way?
Application: Data fitting Vectors and solutions Homogeneous systems Non-homogeneous systems
Radboud University Nijmegen
General solutions
The Goal:
- (^) Describe the space of solutions of a system of equations.
- In general, there can be infinitely many solutions, but only a
few are actually ‘different enough’ to matter. These are called
basic solutions.
- Using the basic solutions, we can write down a formula which
gives us any solution: the general solution.
Example (General solution for one equation)
2 x 1 − x 2 = 3 gives x 2 = 2x 1 − 3
So a general solution (for any c) is:
x 1 := c x 2 := 2c − 3
Application: Data fitting Vectors and solutions Homogeneous systems Non-homogeneous systems
Radboud University Nijmegen
A new tool: vectors
- (^) Vectors are useful for lots of stuff. In this lecture, we’ll use
them to hold solutions.
- (^) Since variable names don’t matter, we can write this:
x 1 := 2 x 2 := − 1 x 3 := 0
- (^) ...more compactly as this:
- ...or even more compactly as this: (2, − 1 , 0).
Application: Data fitting Vectors and solutions Homogeneous systems Non-homogeneous systems
Radboud University Nijmegen
Linear combinations
- (^) We can multiply a vector by a number to get a new vector:
c ·
x 1
x 2
. . .
xn
cx 1
cx 2
. . .
cxn
This is called scalar multiplication.
- (^) ...and we can add vectors together:
x 1
x 2
. . .
xn
y 1
y 2
. . .
yn
x 1 + y 1
x 2 + y 2
. . .
xn + yn
as long as the are the same length.
Application: Data fitting Vectors and solutions Homogeneous systems Non-homogeneous systems
Radboud University Nijmegen
Aside: checking linear independence
Equivalently:
Definition
Vectors V 1 ,... , Vn are called linearly independent if for all scalars
a 1 ,... , an ∈ R one has:
a 1 · V 1 + · · · + an · Vn = 0 implies a 1 = a 2 = · · · = an = 0
Example
The 3 vectors (1, 0 , 0), (0, 1 , 0), (0, 0 , 1) are linearly independent,
since if
a 1 · (1, 0 , 0) + a 2 · (0, 1 , 0) + a 3 · (0, 0 , 1) = (0, 0 , 0)
then, using the computation from the previous slide,
(a 1 , a 2 , a 3 ) = (0, 0 , 0), so that a 1 = a 2 = a 3 = 0
Application: Data fitting Vectors and solutions Homogeneous systems Non-homogeneous systems
Radboud University Nijmegen
Proving (in)dependence via equation solving I
- Investigate (in)dependence of
, and
- Thus we ask: are there any non-zero a 1 , a 2 , a 3 ∈ R with:
a 1
(^) + a 2
(^) + a 3
- (^) If there is a non-zero solution, the vectors are dependent, and
if a 1 = a 2 = a 3 = 0 is the only solution, they are independent
Application: Data fitting Vectors and solutions Homogeneous systems Non-homogeneous systems
Radboud University Nijmegen
Proving (in)dependence via equation solving III
- Same (in)dependence question for:
- (^) With corresponding matrix:
(^) reducing to
- Thus the only solution is a 1 = a 2 = a 3 = 0. The vectors are
independent!
Application: Data fitting Vectors and solutions Homogeneous systems Non-homogeneous systems
Radboud University Nijmegen
Linear combinations of solutions
- (^) It is not the case in general that linear combinations of
solutions give solutions. For example, consider: {
x 1 + 2x 2 + x 3 = 0
x 2 + x 4 = 2
V 1 =
, V 2 =
but not V 1 +V 2 =
, 3 V 1 ,...
- The problem is this system of equations is not homogeneous,
because the the 2 on the right-hand-side (RHS) of the second
equation.
Application: Data fitting Vectors and solutions Homogeneous systems Non-homogeneous systems
Radboud University Nijmegen
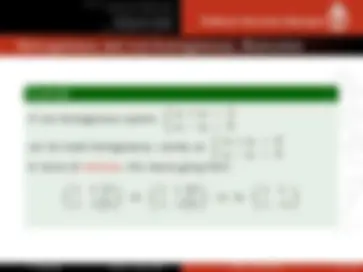
Homogeneous and non-homogeneous, illustration
Example
A non-homogeneous system:
x 1 + x 2 = 3
x 1 − x 2 = 0
can be made homogeneous, namely as:
x 1 + x 2 = 0
x 1 − x 2 = 0
In terms of matrices, this means going from:
to
i.e. to
Application: Data fitting Vectors and solutions Homogeneous systems Non-homogeneous systems
Radboud University Nijmegen
Zero solution, in homogeneous case
Lemma
Each homogeneous equation has (0,... , 0) as solution.
Proof: A homogeneous system looks like this
a 11 x 1 + · · · + a 1 nxn = 0
. . .
am 1 x 1 + · · · + amnxn = 0
Consider the equation at row i:
ai 1 x 1 + · · · + ainxn = 0
Clearly it has as solution x 1 = x 2 = · · · = xn = 0.
This holds for each row i. -