



Engr/Math/Physics 25
Chp8 Linear
Algebraic Eqns-1
Docsity.com








Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
These are the Lecture Slides of Computational Methods which includes Thévenin’s Equivalent Circuit, Circuit Simplification, Analysis of Power Transfer, Voltage Division, Analytical Game Plan, Array Operation, Element Operations, Number of Allowable Values etc.Key important points are: Linear Equations, Linear Algebraic Equations, Gaussian Elimination, Cramer’s Method, System of Equations, Transcendental Functions, Elementary Row Operations, Error Propagates, Importance of Pivoting
Typology: Slides
1 / 32

This page cannot be seen from the preview
Don't miss anything!
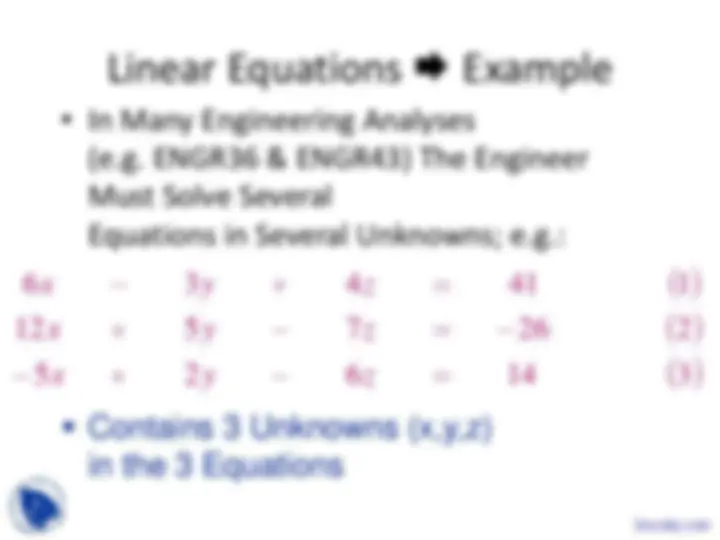
x y z
x y z
x y z
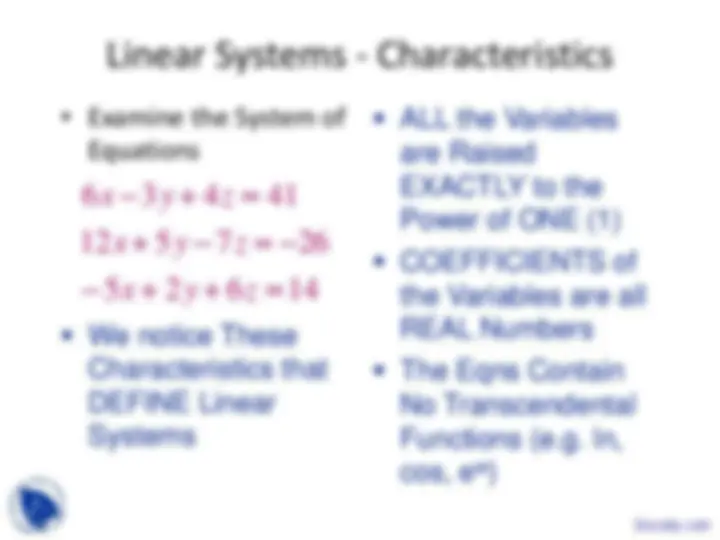
We notice These Characteristics that DEFINE Linear Systems
ALL the Variables are Raised EXACTLY to the Power of ONE (1) COEFFICIENTS of the Variables are all REAL Numbers The Eqns Contain No Transcendental Functions (e.g. ln, cos, e w^ )
( ) [ ]
( ) [ 5 2 6 14 ] 5
3 12
6 3 4 41 6
2 12
1 12 5 7 26
− + + = −
− + =
x y z
x y z
x y z
2 12 6 8 82
1 12 5 7 26
− − = −
− + =
x y z
x y z
x y z
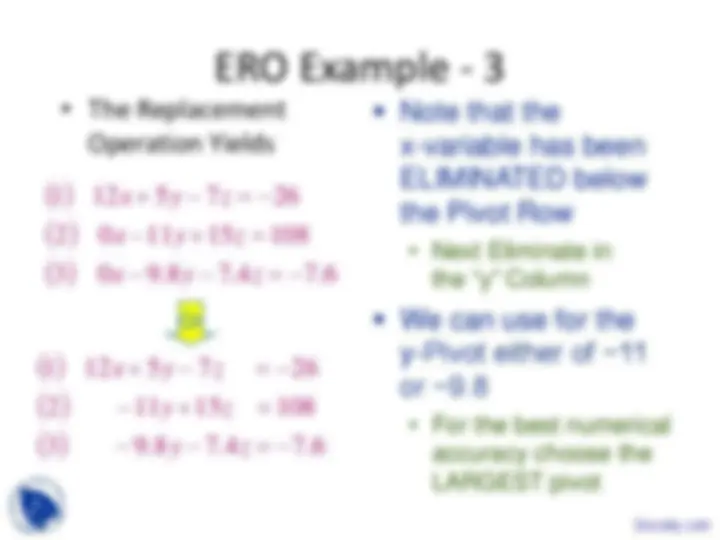
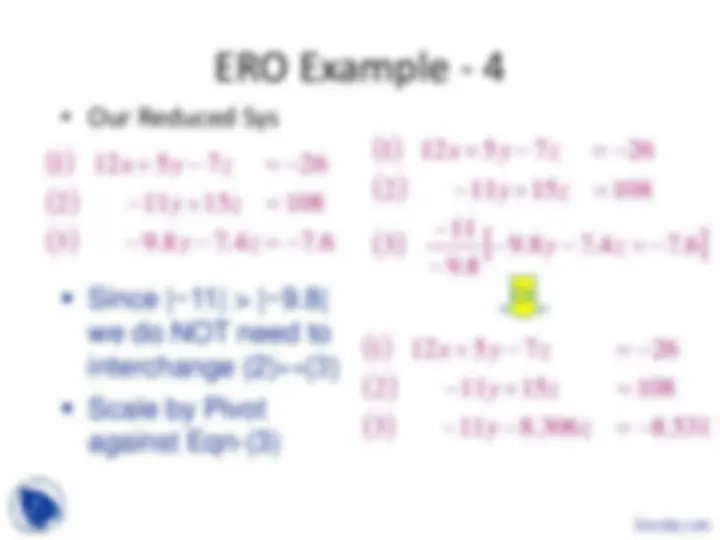
Note that the 1 st Coeffiecient in the Pivot Eqn is Called the Pivot Value
2 0 11 15 108
1 12 5 7 26
− − = −
− + =
x y z
x y z
x y z
Or
Note that the x-variable has been ELIMINATED below the Pivot Row
2 11 15 108
1 12 5 7 26
− − = −
− + =
y z
y z
x y z
2 11 15 108
1 12 5 7 26
− = −
− + =
z
y z
x y z
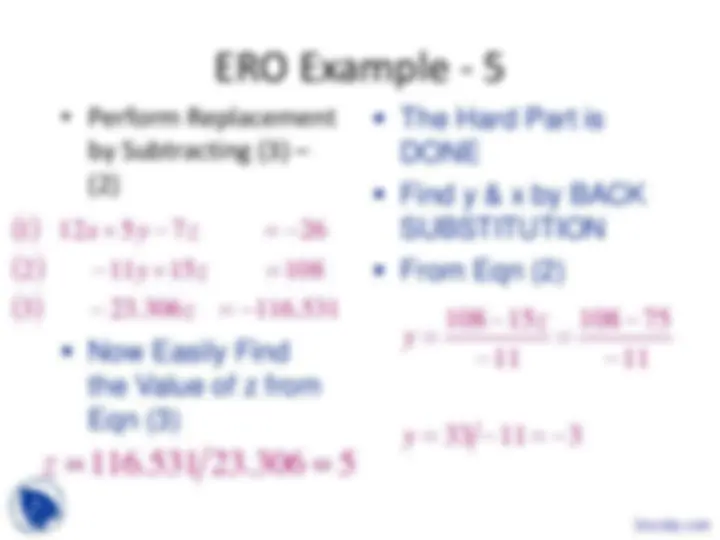
Now Easily Find the Value of z from Eqn (3)
The Hard Part is DONE Find y & x by BACK SUBSTITUTION From Eqn (2)
33 11 3
11
108 75 11
108 15
= − = −
−
= − −
= −
y
y z
2 12
24 12
35 15 26
12
7 5 26
12 5 7 26
= + − = =
⇒ = − −
x
x z y
x y z
Thus the Solution Set for Our Linear System
( ) ( ) ( ) 3 5 2 6 14
x y z
x y z
x y z
x = 2 y = − 3 z = 5
x y
x y
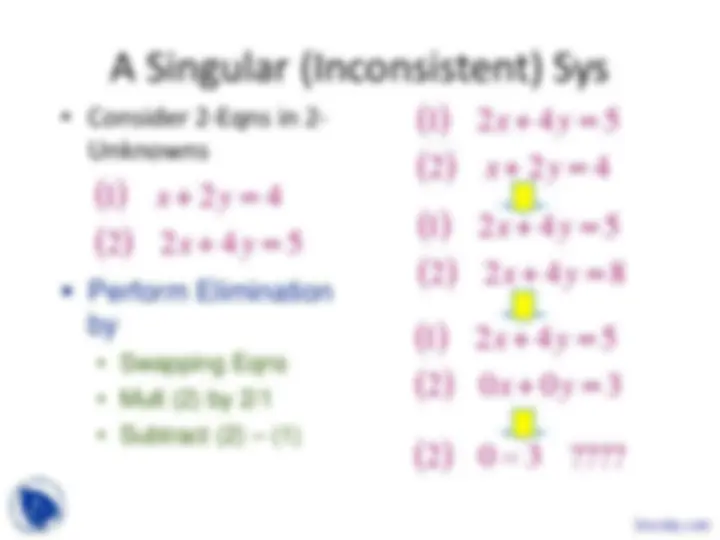
The Lines do NOT CROSS to Define a A Solution Point
Singular Systems Have at least Two “PARALLEL” Eqns
y
x y
x y 1
y
x
x y
x y 0
y
x
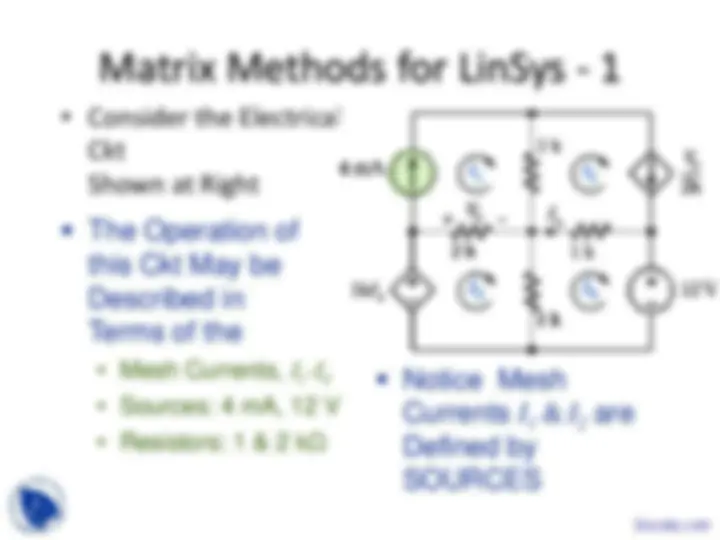
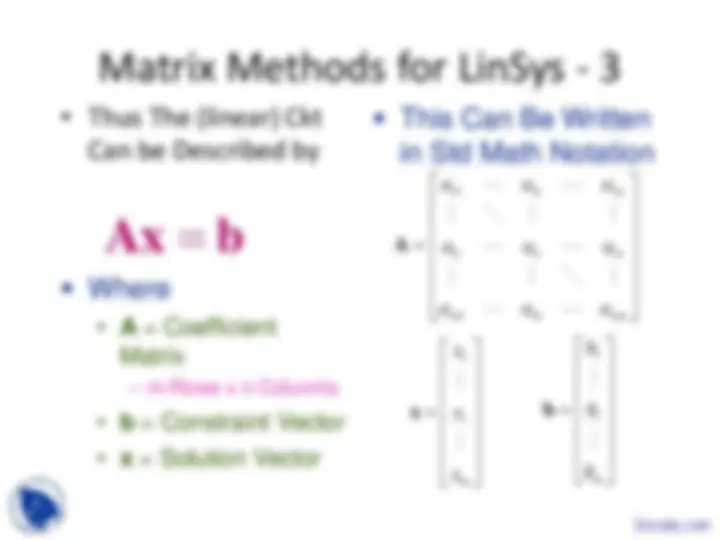
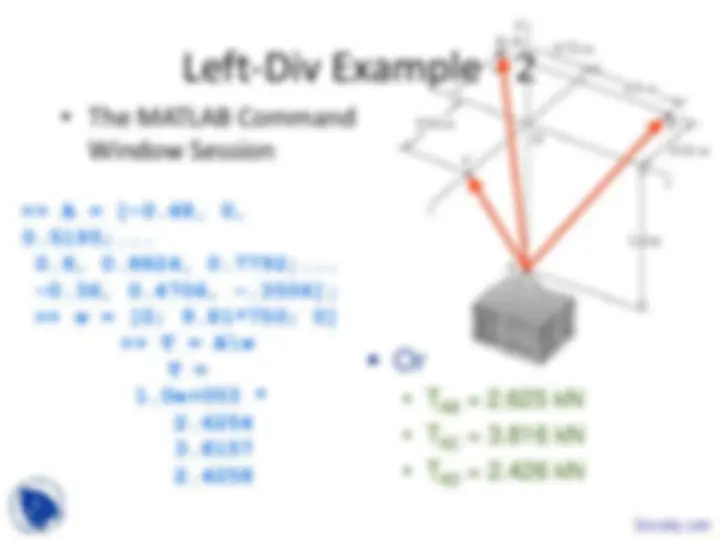
The Operation of this Ckt May be Described in Terms of the
Notice Mesh Currents I 1 & I 2 are Defined by SOURCES
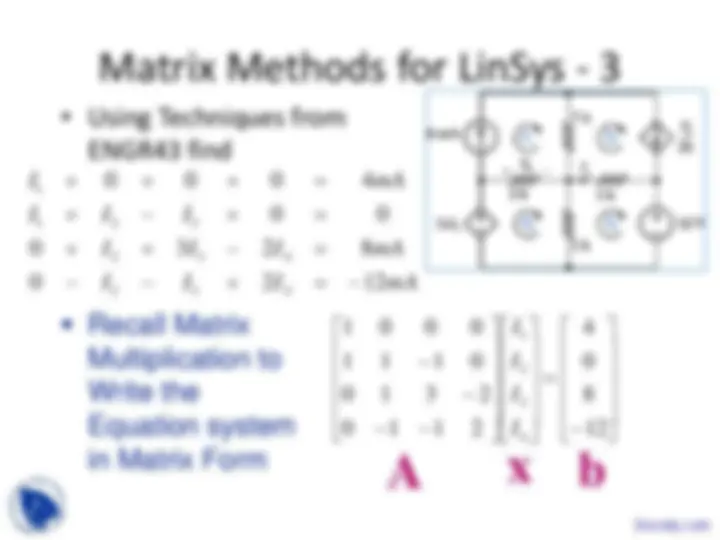
Recall Matrix Multiplication to Write the Equation system in Matrix Form
I I I mA
I I I mA
I I I
I mA
0 2 12
0 3 2 8
0 0
0 0 0 4
2 3 4
2 3 4
1 2 3
1
− − + = −
− + =
−
=
− −
−
−
12
8
0
4
0 1 1 2
0 1 3 2
1 1 1 0
1 0 0 0
4
3
2
1
I
I
I
I
A x^ b