Download Bayesian Regression: Nonlinear Inputs & Probabilistic Approach by Chuck Anderson - Prof. C and more Study notes Computer Science in PDF only on Docsity!
Models (NonlinearInputs; Probabilistic) Chuck Anderson Bayesian Regression DerivationApplication to Auto MPG Data Application to 1-DData
CS545: Linear Models (Nonlinear Inputs;
Probabilistic)
Chuck Anderson
Department of Computer Science Colorado State University
Fall, 2009
Models (NonlinearInputs; Probabilistic) Chuck Anderson Bayesian Regression DerivationApplication to Auto MPG Data Application to 1-DData
Outline
Bayesian Regression Derivation Application to Auto MPG Data Application to 1-D Data
Models (NonlinearInputs; Probabilistic) Chuck Anderson Bayesian Regression DerivationApplication to Auto MPG Data Application to 1-DData
Bayesian Regression
The full Bayesian approach to regression does not solve for a single w value. Instead, an expression for the probability of a model, given the data, is formulated. Then, a sum is taken over all possible models of the prediction value for a given model weighted by the probability of that model. So p(tn|xn, X, T) =
p(tn, model|xn, X, T) dmodel
=
p(tn|model, xn, X, T) p(model|X, T) dmodel
Models (NonlinearInputs; Probabilistic) Chuck Anderson Bayesian Regression DerivationApplication to Auto MPG Data Application to 1-DData
Bayesian Regression
The full Bayesian approach to regression does not solve for a single w value. Instead, an expression for the probability of a model, given the data, is formulated. Then, a sum is taken over all possible models of the prediction value for a given model weighted by the probability of that model. So p(tn|xn, X, T) =
p(tn, model|xn, X, T) dmodel
=
p(tn|model, xn, X, T) p(model|X, T) dmodel
As before, let’s choose the model to be y (xn, w) = φ(xn)w + �, where � ∼ N (0, β−^1 ). With this choice p(tn|model, xn, X, T) = p(tn|w, φ, xn, X, T, β) = N (tn|φ(xn)w, β−^1 )
Models (NonlinearInputs; Probabilistic) Chuck Anderson Bayesian Regression DerivationApplication to Auto MPG Data Application to 1-DData
Bayes Theorem tells us
p(model|X, T) ∝ p(T|X, model)p(model)
or
p(w|φ, X, T, β) ∝ p(T|w, φ, X, β)p(w)
We will model the data likelihood function as a Gaussian,
p(T|w, φ, X, β) = N (T|Φw, β−^1 I )
=
∏^ N
n=
N (tn|φ(xn)w, β−^1 )
Models (NonlinearInputs; Probabilistic) Chuck Anderson Bayesian Regression DerivationApplication to Auto MPG Data Application to 1-DData
Bayes Theorem tells us
p(model|X, T) ∝ p(T|X, model)p(model)
or
p(w|φ, X, T, β) ∝ p(T|w, φ, X, β)p(w)
We will model the data likelihood function as a Gaussian,
p(T|w, φ, X, β) = N (T|Φw, β−^1 I )
=
∏^ N
n=
N (tn|φ(xn)w, β−^1 )
Again, choose the prior distribution of the weights to be the zero-mean Gaussian
p(w|α) = N (w| 0 , α−^1 I )
Models (NonlinearInputs; Probabilistic) Chuck Anderson Bayesian Regression DerivationApplication to Auto MPG Data Application to 1-DData
Now the original equation becomes
p(tn|xn, X, T) = ∫ N (tn|φ(xn)w, β−^1 )
∏^ N
n=
N (tn|φ(xn)w, β−^1 )
N (w| 0 , α−^1 I )dw
Let’s work on the last two terms in the integral. They involve products of Gaussians, which involve products of exponential terms with base e. These products are formed by adding the exponents, so let’s focus on the value of the exponent of e. The sum we get is
(β
∑^ N
n=
(tn−φ(xn)w)^2 + wT^ αI w)
Models (NonlinearInputs; Probabilistic) Chuck Anderson Bayesian Regression DerivationApplication to Auto MPG Data Application to 1-DData
Continuing working with the sum, we get
− 12 (β
X^ N n=
(tn − φ(xn)w)^2 + wT^ αI w)
= − 12 β
X^ N n=
t n^2 +
X^ N n=
tnφ(xn)w − 12 (
X^ N n=
φ(xn)w )^2 − 12 wT^ αI w
= − 12 βTT^ T + βTT^ Φw − 12 βwT^ ΦT^ Φw − 12 wT^ αI w
= − 12 wT^ (βΦT^ Φ + αI )w + wT^ βΦT^ T − 12 βTT^ T
Models (NonlinearInputs; Probabilistic) Chuck Anderson Bayesian Regression DerivationApplication to Auto MPG Data Application to 1-DData
Reverse engineering a Gaussian
Look at expression (2.71) in Bishop’s book and the text around it.
−
(x − μ)T^ Σ−^1 (x − μ) =
−
xT^ Σ−^1 x + xT^ Σ−^1 μ + const
Models (NonlinearInputs; Probabilistic) Chuck Anderson Bayesian Regression DerivationApplication to Auto MPG Data Application to 1-DData
Reverse engineering a Gaussian
Look at expression (2.71) in Bishop’s book and the text around it.
−
(x − μ)T^ Σ−^1 (x − μ) =
−
xT^ Σ−^1 x + xT^ Σ−^1 μ + const
Comparing with our previous expression
wT^ (βΦT^ Φ + αI )w + wT^ βΦT^ T −
βTT^ T
Models (NonlinearInputs; Probabilistic) Chuck Anderson Bayesian Regression DerivationApplication to Auto MPG Data Application to 1-DData
Unfortunately, with this definition, the linear terms do not match. To make them match, we can introduce Σ−^1 Σ = I at the right place, so
wT^ βΦT^ T becomes wT^ Σ−^1 ΣβΦT^ T
Models (NonlinearInputs; Probabilistic) Chuck Anderson Bayesian Regression DerivationApplication to Auto MPG Data Application to 1-DData
Unfortunately, with this definition, the linear terms do not match. To make them match, we can introduce Σ−^1 Σ = I at the right place, so
wT^ βΦT^ T becomes wT^ Σ−^1 ΣβΦT^ T
making the full exponent
wT^ (βΦT^ Φ + αI )w+
wT^ (βΦT^ Φ + αI )(βΦT^ Φ + αI )−^1 βΦT^ T− 1 2
βTT^ T
Models (NonlinearInputs; Probabilistic) Chuck Anderson Bayesian Regression DerivationApplication to Auto MPG Data Application to 1-DData
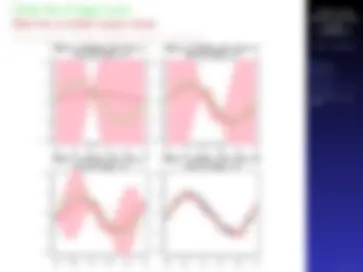
Renaming the mean and covariance matrix of this distribution of w to be
Sw = Σ = (βΦT^ Φ + αI )−^1 μw = μ = βSw ΦT^ T,
Models (NonlinearInputs; Probabilistic) Chuck Anderson Bayesian Regression DerivationApplication to Auto MPG Data Application to 1-DData
Renaming the mean and covariance matrix of this distribution of w to be
Sw = Σ = (βΦT^ Φ + αI )−^1 μw = μ = βSw ΦT^ T,
We have now identified the resulting Gaussian to be
N (μw , Sw ).
Our book uses variable names μN and SN for μw and Sw.