Download Linear Programming: The Simplex Method - A Comprehensive Guide and more Lecture notes Logistics in PDF only on Docsity!
Chapter 6 Linear Programming: The
Simplex Method
We will now consider LP (Linear Programming) problems that involve more than 2 decision variables. We will learn an algorithm called the simplex method which will allow us to solve these kind of problems.
Maximization Problem in Standard Form
We start with defining the standard form of a linear programming problem which will make further discussion easier.
Definition. A linear programming problem is said to be a standard max- imization problem in standard form if its mathematical model is of the following form:
Maximize P = c 1 x 1 + c 2 x 2 +... + cnxn subject to a 11 x 1 + a 12 x 2 +... + a 1 nxn ≤ b 1 · · · am 1 x 1 + am 2 x 2 +... + amnxn≤ bm x 1 , x 2 ,... , xn ≥ 0
where x 1 , x 2 ,... , xn are decision variables, c 1 ,... , cn, a 11 ,... , amn are any real numbers, and b 1 ,... , bm ≥ 0 are nonnegative real numbers. Note: Any linear programming problem (in the form we defined earlier) can be converted intothe standard maximization problem in standard form.
Initial System and Slack Variables
Roughly speaking, the idea of the simplex method is to represent an LP problem as a system of linear equations, and then a certain solu- tion (possessing some properties we will define later) of the obtained system would be an optimal solution of the initial LP problem (if any exists). The simplex method defines an efficient algorithm of finding this specific solution of the system of linear equations.
Therefore, we need to start with converting given LP problem into a system of linear equations. First, we convert problem constraints into equations with the help of slack variables.
Consider the following maximization problem in the standard form:
Maximize P = 5x 1 + 4x 2 (1) subject to 4 x 1 + 2x 2 ≤ 32 2 x 1 + 3x 2 ≤ 24 x 1 , x 2 ≥ 0
The variables s 1 and s 2 are called slack variables because each makes up the difference (takes up the slack) between the left and right sides of an inequality. For each problem constraint of the original problem we introduce a single slack variable.
Basic Solutions and Basic Feasible Solutions
We now define two important types of solutions of the initial systems that we should focus our attention on in order to identify the optimal solution of the LP.
Definition (Basic Solution) Given an LP with n decision variables and m constraints, a basic solution of the corresponding initial system is a solution of the initial systems (not taking into account nonnegative constraints) in which n of the variables x 1 ,... , xn, s 1 ,... , sm are equal to zero. Note: the list of variables x 1 ,... , xn, s 1 ,... , sm, n of which should be zero, does not contain P.
Definition (Basic Feasible Solution) If a basic solution of the initial system corresponds to a certain point in the feasible region of the original LP, then it is called a basic feasible solution.
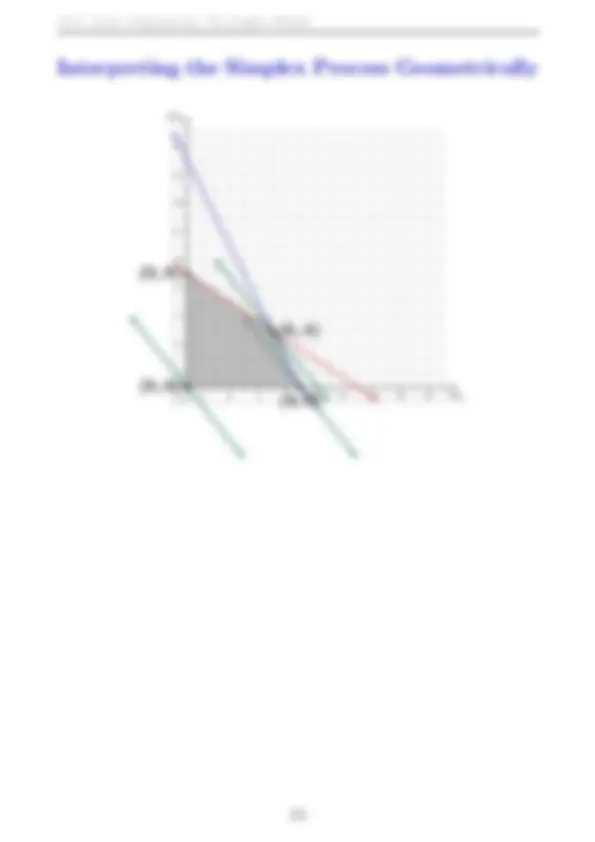
The feasible region of (1) looks like
−^ − 11 1 3 5 7 9 11 13 15 17
1
3
5
7
9
11
13
15
17
x 1
x 2
In 2-dimensional case (2 decision variables), the set of basic solutions is the of pairwise intersections of boundary lines of all problem con- straints. In turn, the set of basic feasible solutions is the set of the corner points. Indeed,
Simplex Tableau
The simplex method utilizes matrix representation of the initial system while performing search for the optimal solution. This matrix repre- sentation is called simplex tableau and it is actually the augmented matrix of the initial systems with some additional information.
Let’s write down the augmented matrix of the initial system corre- sponding to the LP (1).
At each step of the simplex method a particular basic feasible solution is considered. Information about this solutions is also represented in the simplex tableau. Recall that we defined a basic feasible solution as a solution with n variables being zero. In this context, we have
Definition (Basic and Nonbasic Variables) The variables of a basic solution that are assumed to be zero are called nonbasic variables. All the remaining variables are called basic variables.
So at each step, we need define the list of basic and nonbasic variables. Note that if n nonbasic variables are assigned the value 0, the corre- sponding values of the nonbasic m + 1 variables can be determined by solving the corresponding system of linear equations.
Question: How do we decide which variables are basic and which are not? In particular, how can we decide what variables would be basic and what would be nonbasic on the very first step of the simplex method (how do we choose the initial basic feasible solution)?
Therefore, for our example we have
Pivot Operation
So far, we set up a simplex tableau and identified the initial basic feasible solution by determining basic and nonbasic variables. This is the first step of the simplex method.
At each further step the simplex methods swaps one of the non- basic variables for one of the basic variables (so it moves to another vertex of the polyhedron) in the way such that the value of the objective function is improved (becomes higher). If improve- ment of the objective function is not possible, then we got an optimal solution.
Definition (Pivot Column) The column corresponding to the entering variable is called the pivot column.
Now, let’s select the exiting variable:
Definition (Pivot Row and Pivot Element) The row corresponding to the exiting variable is called the pivot row. The element at the intersection of the pivot column and the pivot row is called the pivot element.
So, we have
Getting back to our example
Summary
More Examples
- Example - Maximize P = 30x 1 + 40x
- subject to 2 x 1 + x 2 ≤ - x 1 + x 2 ≤ - x 1 + 2x 2 ≤ - x 1 , x 2 ≥
- Example - Maximize P = 6x 1 + 3x
- subject to − 2 x 1 + 3x 2 ≤ - − x 1 + 3x 2 ≤ - x 1 , x 2 ≥
- Example - Maximize P = 4x 1 + 3x 2 + 2x
- subject to 3 x 1 + 2x 2 + 5x 3 ≤ - 2 x 1 + x 2 + x 3 ≤ - x 1 + x 2 + 2x 3 ≤ - x 1 , x 2 , x 3 ≥