



Linear Algebra
Linear Transformations
Docsity.com
























































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Dr. Arjun Kapoor delivered this lecture at Institute of Mathematics and Applications for Linear Algebra course to cover following points: Linear, Transformations, Real, Valued, Functions, Transformation, Matrix, Augmented, Image, Shear
Typology: Slides
1 / 75

This page cannot be seen from the preview
Don't miss anything!
2
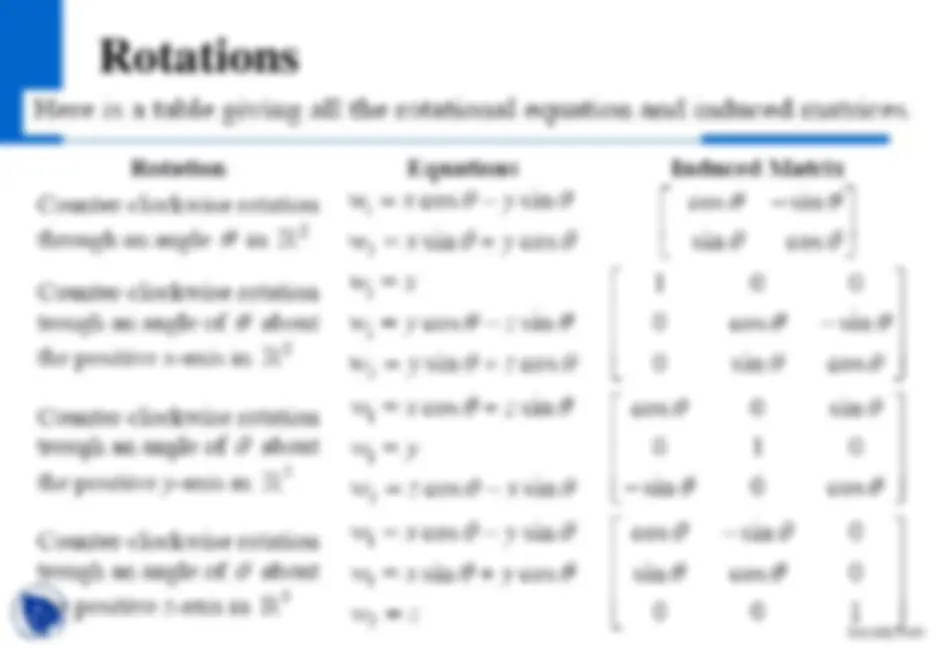
Formula Example Description
Function from R to R Function from to R Function from to R
Function from to R
2 2 2
2
2 2
2 1 , 2 , , 1
n
n
x
f x x x x x
2 R 3 R n R
4
Another way to view :
Matrix A is an object acting on x by multiplication to produce a new vector Ax or b.
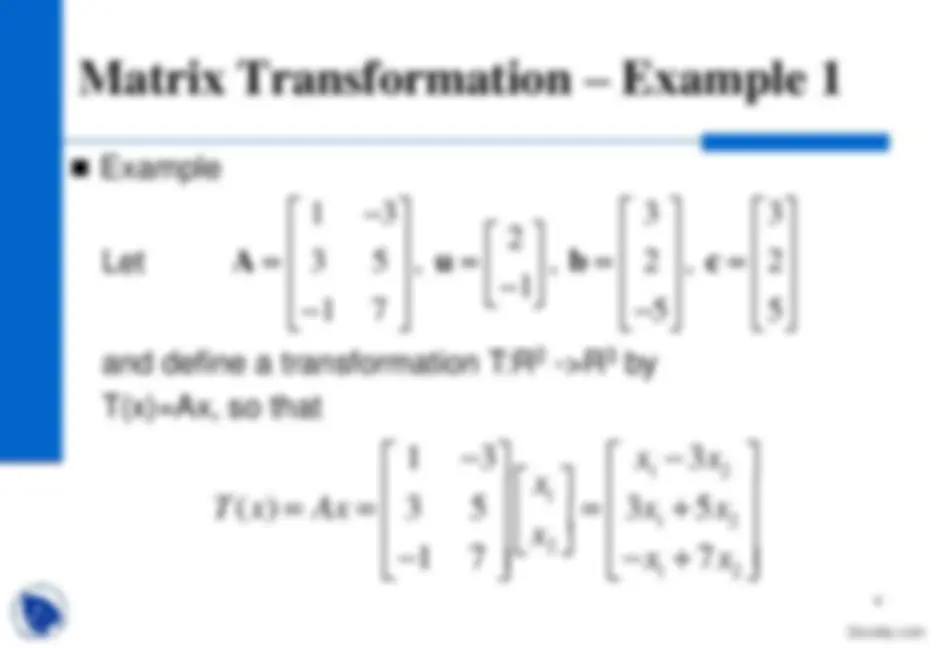
Example
Ax = b
1
4 3 1 3 1 5
2 0 5 1 1 8
1
(^)
Ax = b
5
Solving Ax = b amounts to finding all vectors x in Rn
that are transformed into the vector b in Rm^ under the action of multiplication by Am×n. The correspondence from x to b is a function from one set of vectors to another. This concept is generalization of f:R - > R.
x (^) b
Multiplication by A
n m
7
8
For each x in Rn^ , Tx is computed as Ax , where A is
an m×n matrix. We sometimes denote this Matrix Transformation by x - > Ax. Domain of T lies in Rn when A has n columns and range of T lies in Rm^ when each column of A has m entries.
10
a. Find T(u) , the image of u under the transformation T b. Find an x in R^2 whose image under T is b. c. Is there more than one x whose image under T is b. d. Determine if c is in the range of the transformation T.
11
Solution a.
b. Solve Tx=b for x. That is, solve Ax=b
1 3 5 2 3 5 1 1 1 7 9
^ (^) (^) (^) (^)
T(u) = Au
1
2
1 3 3
3 5 2
1 7 5
x
x
^ (^) (^)
13
c. Any x whose image under T is b must satisfy
We have seen in (b) that there is exactly one x whose
image is b.
1
2
1 3 3
3 5 2
1 7 5
x
x
^ (^) (^)
14
d. The vector c is in the range of T if c is the image of some
x in R^2 , that is, if c=T(x) for some x. This is just another way of asking if the system Ax=c is consistent. To find the answer, row reduce the augmented matrix
The third equation 0 =- 35 shows that the system is
inconsistent. So c is not in the range of T.
1 3 3 1 3 3 1 3 3 1 3 3 3 5 2 0 14 7 0 1 2 0 1 2 1 7 5 0 4 8 0 14 7 0 0 35
^ ^ ^ (^) (^) (^) (^)
16
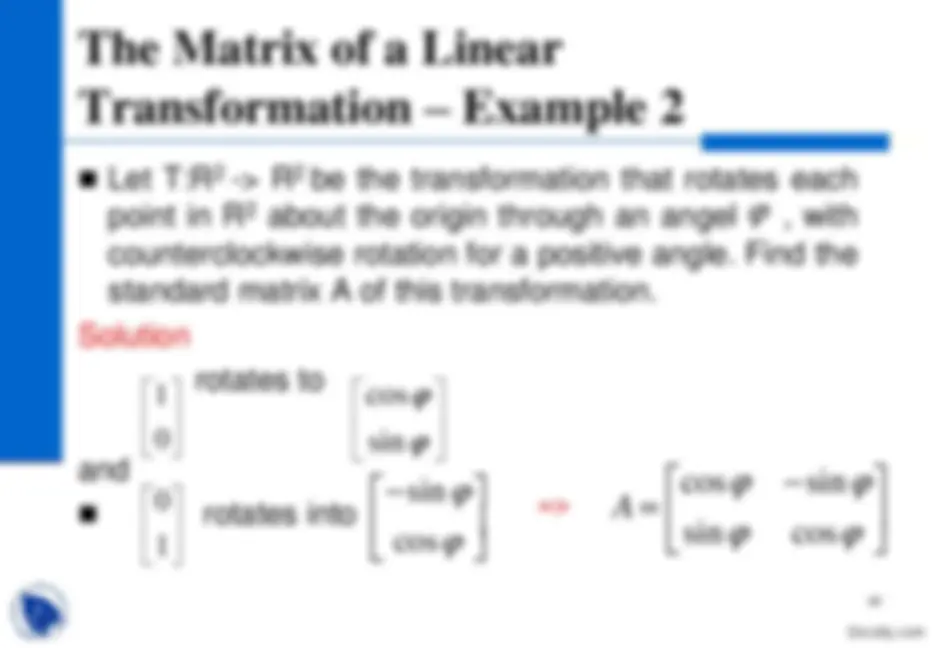
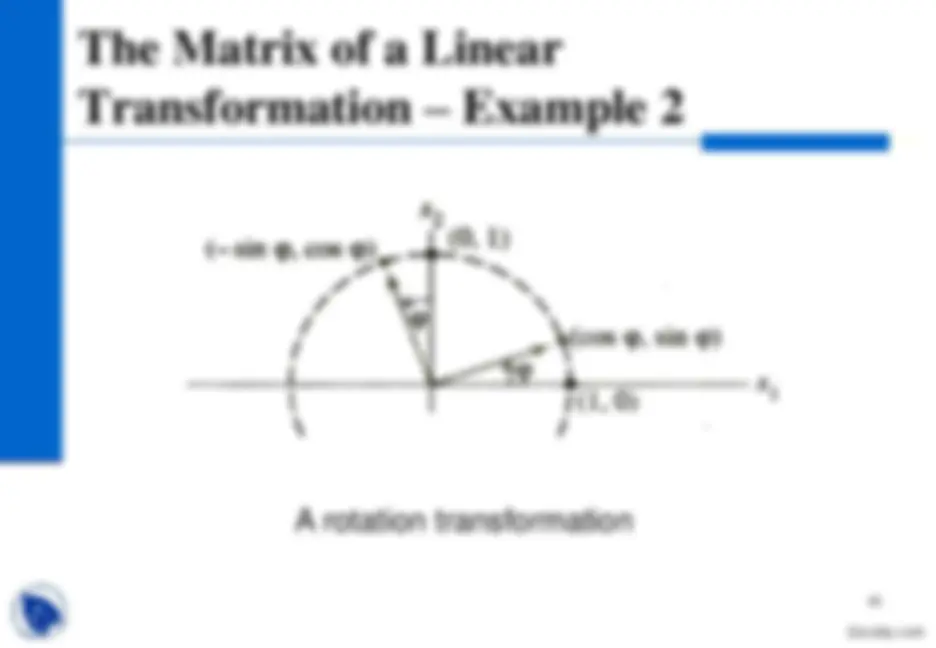
Let
Then the transformation T:R^2 - > R^2 defined by Ax is
called the Shear Transformation.
For example the image of
1 3 0 1
A
2 1 3 2 8 is 2 0 1 2 2
17
Shear Transformation
19
1 1 1 2 2 2 3 3 3
1 1 1 1 2 2 2 2 3 3 3 3
1 1 2 2 3 3 1 1 2 2 3 3
1 1
1 2 3 2 1 2 3 2
3 3
a ( u v ) a ( u v ) a ( u v )
a u a v a u a v a u a v
a u a u a u a v a v a v
u v
a a a u a a a v
u v
Au Av
Similarly (b) can also be proved
20
A transformation T is linear, if
1. T(u+v) = T(u) + T(v) **(for all u,v in the domain of T)
Property ( 1 ) says that the result T(u+v) i.e. first adding
u+v and then applying T is same as applying T first to u and v and then adding T(u) and T(v).