Download Autonomous Satellite Orbit Navigation: LiAISON and Satellite-to-Satellite Tracking - Prof. and more Study notes Aerospace Engineering in PDF only on Docsity!
Linked, Autonomous, Interplanetary
Satellite Orbit Navigation (LiAISON)
Presentation by
Keric Hill
For ASEN 5070
Statistical Orbit Determination
Fall 2006
Why Do We Need Autonomy?
Planetary images courtesy of http://photojournal.jpl.nasa.gov
L 1 L 2
New Lunar Missions:
Orbiters
Rovers
Sample Return
Comm Sats
Space Stations
CEV
Observatories
Circular Restricted Three-body
Problem
P 1 P
x
y
Barycenter
z
r 1
r 2
spacecraft
Lagrange Points
x
y
L 1 L 2
L 4
L 5
L 3
P 1 P 2
Types of Autonomy
• Individual Autonomy
– Earth limb sensors
– Sun sensors
– Star trackers
– Magnetic field sensors
– GPS receiver (in LEO)
– Optical Navigation
• Constellation Autonomy
using Satellite-to-Satellite
Tracking (SST)
– SST optical tracking
– SST crosslink ranging
Satellite-to-Satellite Tracking
(SST)
SST picture
Image courtesy of
http://www.centennialofflight.gov/essay/Dictionary/TDRSS/
• Scalar measurements
(range or range-rate)
• Estimate size, shape of
orbits
• Estimate relative
orientation of the
orbits.
Satellite-to-Satellite Tracking
(SST)
• Scalar measurements
(range or range-rate)
• Estimate size, shape of
orbits
• Estimate relative
orientation of the
orbits.
Image courtesy of
http://www.centennialofflight.gov/essay/Dictionary/TDRSS/
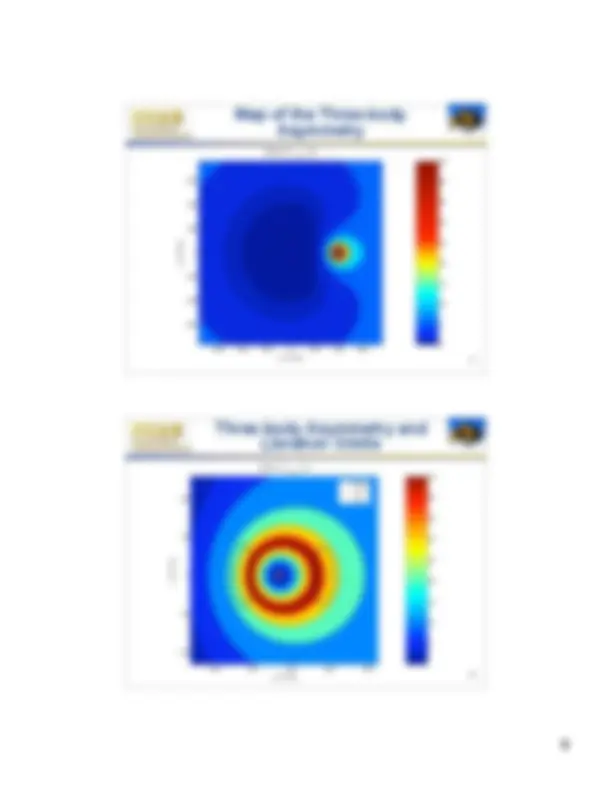
Two-body Problem SST
Two-Body Symmetry
The vector field of accelerations in the x-y plane for the two-body problem.
Three-body Symmetry
The vector field of accelerations in the x-z plane for the three-body problem.
Three-body Solutions
Strength of the Asymmetry
Liaison Navigation
• Linked, Autonomous, Interplanetary
Satellite Orbit Navigation (LiAISON)
– SST only is used to determine the
orbits of multiple spacecraft when at
least one is in a locally unique orbit.
– li-ai-son: Communication for mutual
understanding. -Merriam-Webster
(www.m-w.com)
Orbit Determination Techniques
• Two spacecraft.
• Batch processor :
– Householder transformation.
• Observation type: SST Range.
– Gaussian noise 1 σ = 1.0 m.
• Fit span = 1.5 halo orbit periods (~18 days).
• Infinite a priori covariance.
• Observations every ~ 6 minutes.
• LOS checks.
LL 1 Family
Observability
• The state vector is observable if all the parameters can
be estimated independently using with the available
observations.
• If the H matrix is not full rank, or if the information
matrix is singular (not positive definite), then the state
vector is unobservable.
• A priori covariance can make it seem like the state is
observable when it is not.
• The eigenvectors corresponding to the zero
eigenvalues of the information matrix show the vector
along which the state is unobservable.
Position Along the Halo
Initial Positions
Sat 1
Spacecraft Separation
Out of Plane Component
LL 1 Halo 2 constellations
Other Tests
• Estimated Range Bias
• Limited tracking periods
• SST Doppler
• Larger interval between observations
• Constant Force Model Errors
• Sinusoidal Observation Error
• Varied Fit Spans
• Simulation Results
Monte Carlo Analysis
JPL Ephemeris Model
• JPL’s Planetary Ephemerides:
– DE403 better for the Moon
– DE405 better for the other planets
– Solar System Barycenter Coordinates
– Julian Ephemeris Date Time Scale (TDB)
• Generating Halo Orbits:
– Multiple Shooting Method
• Numerical Precision Problems
– JED 2,454,069.37575443 (Nov 29, 2006 2100 UTC)
– R_Moon = 148,376,285.478218 km
Halo Orbiter:
4 Δ v’s per period 5% Δ v errors cR error -> 1 x 10-9^ m/s^2 position error RSS ≈ 80 m
Two-Satellite Liaison Navigation
Simulation
Lunar Orbiter:
50x 95 km, polar orbit cR error -> 1 x 10-9^ m/s^2 5% Δ v errors 1 σ gravity field clone position error RSS ≈ 7 m
Propagation:
RK78 with JPL DE ephemeris, SRP, LP100K Lunar Gravity (20x20)
Orbit Determination:
Extended Kalman Filter
Observations:
Crosslink range with 1 m noise every 60 seconds
Moon
Earth
The lunar orbiter could hold science
instruments and be tracked to
estimate the far side gravity field.
References
[1] Chory, M.A., Hoffman, D.P., and J.L. LeMay, “Satellite Autonomous Navigation – Status and
History,” Proceedings of the IEEE Position, Location and Navigation Symposium, Las Vegas,
Nevada, 1986, p. 110-121.
[2] Psiaki, M.L., “Autonomous Orbit and Magnetic Field Determination Using Magnetometer and
Star Sensor Data,” Journal of Guidance, Control, and Dynamics, Vol. 18, No. 3, May-June 1995,
pp. 584-592.
[3] Menn, M., “Autonomous Navigation for GPS via Crosslink Ranging,” Proceedings of the IEEE
Position, Location, and Navigation Symposium, Las Vegas, Nevada, 1986, pp. 143-146.
[4] M.L. Psiaki, “Autonomous Orbit Determination for Two Spacecraft from Relative Position
Measurements,” Journal of Guidance, Control, and Dynamics, Vol. 22, No. 2, March-April 1999,
pp. 305-312.
[5] J.R. Yim, J.L. Crassidis, and J.L. Junkins, “Autonomous Orbit Navigation of Two Spacecraft
System Using Relative Line of Sight Vector Measurements,” Paper AAS 04-257, Proceedings of
the AAS/AIAA Spaceflight Mechanics Meeting, Maui, Hawai’i, 2004.
[6] Y. Liu and L. Liu, “Orbit Determination Using Satellite-to-Satellite Tracking Data,” Chinese
Journal of Astronomy and Astrophysics , Vol. 1, No. 3, 2001, pp. 281-286.
[7] B.D. Tapley, B.E. Schutz, and G.H. Born, Statistical Orbit Determination , Elsevier Academic
Press, 2004, pp. 237-240.