



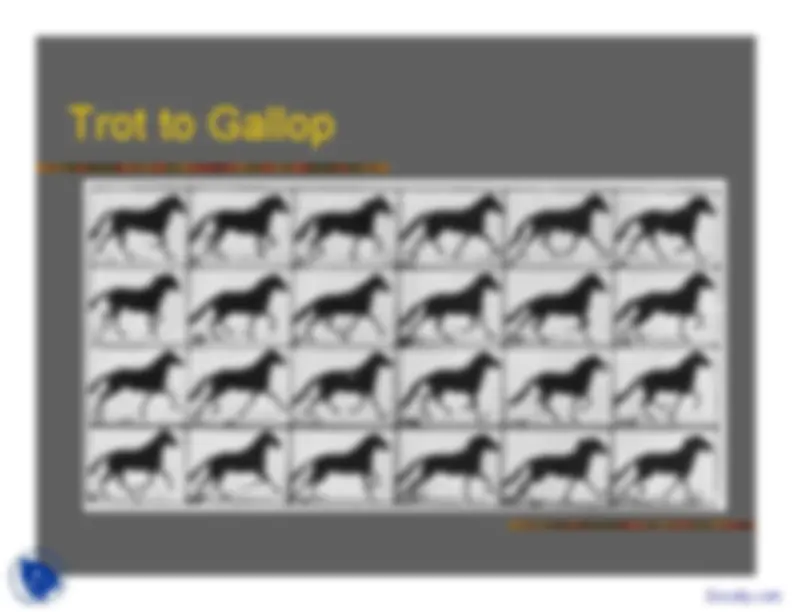
Gait Transitions
Docsity.com





Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
DURING THE COURSE WORK OF MY MS, I LEARN ABOUT THE ANIMATION AND THIS LECTURE SLIDES OF THIS COURSE WORK OF "Computer Animation" HAVE THE IMPORTANT POINTS:Feet, Legged Locomotion, Period Locomotion, Legged Locomotion Three, Eadweard Muybridge, Animal Locomotion, Animals in Motion, Human Figure, Gaits, Feet, Legged Locomotion, Period
Typology: Slides
1 / 16

This page cannot be seen from the preview
Don't miss anything!
Gait Data
Walker
Walker::Update() [1] Walker::Update() { // Compute velocity
// Update step if(We’re stepping (or starting a new step)) { // Compute ideal foot placement goal
Locomotion Summary Walker::Update() { // Compute velocity // Move Mover // Select appropriate gait // Advance GaitPhase // Pose body // Update Steppers } Stepper::Update() { // Check to trigger a new step // Update step if(stepping) { // Compute ideal foot goal // Increment StepPhase // Set IK goal } // Update IK }