Download MECH8001 Control Engineering & Automation Exam, Summer 2011, BEng(Hons) and more Exams Materials science in PDF only on Docsity!
CORK INSTITUTE OF TECHNOLOGY
INSTITIÚID TEICNEOLAÍOCHTA CHORCAÍ
Semester 2 Examinations 2010/
Module Title: Control Engineering and Automation Systems
Module Code: MECH
School: Mechanical and Process Engineering
Programme Title: Bachelor of Engineering (Honours) in Mechanical Engineering
Programme Code: EMECH_8_Y
External Examiner(s): Prof. Robin Clarke, Mr. John J Hayes Internal Examiner(s): Dr. Michael J. O’Mahony
Instructions: Attempt 4 questions All questions carry equal marks
Duration: 2 hours
Sitting: Summer 2011
Requirements for this examination: Graph paper
Note to Candidates: Please check the Programme Title and the Module Title to ensure that you have received the correct examination paper. If in doubt please contact an Invigilator.
- (a) A process control system has the following open loop transfer function;
G s H s
Ke
s s s
s
2
(i) Assuming initially K=5, plot the bode diagram and determine the gain margin and phase margin for the system. Comment on its stability. (15 marks) (ii) What value of K will result in a phase margin of 60o^ and what would be the corresponding gain margin? (5 marks) (b) Explain how dead-time compensation can be introduced to improve the performance of control systems such as (a) above. (5 marks)
- (a) State and discuss the Nyquist Stability Criterion. (5 marks)
(b) A unit feedback control system has the following open loop transfer function:
G s H s
K s
s s
(i) Construct the Nyquist plot for the system (assume initially K=1).
(15 marks)
(ii) Determine how the system stability is influenced by the value of K. (5 marks)
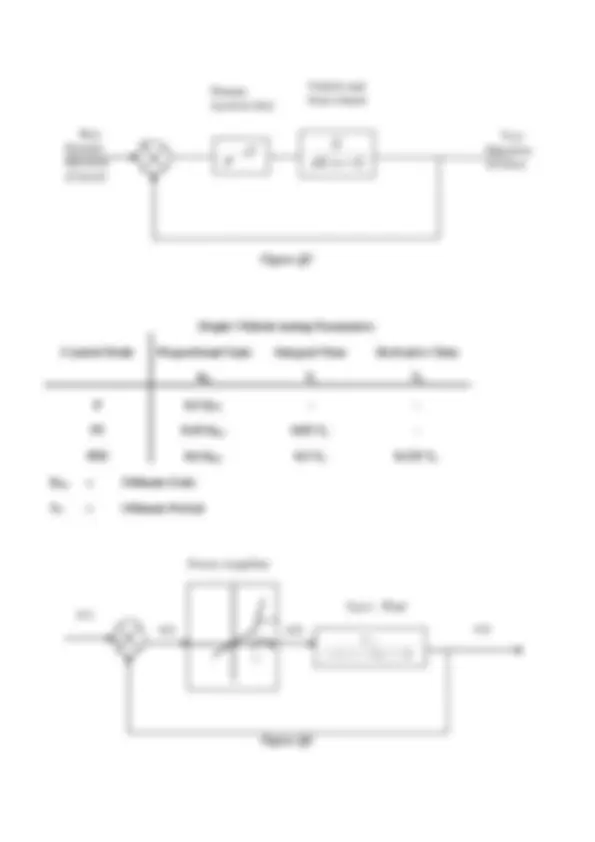
- Figure Q3 is a block diagram of the control system of a car steering system. A typical driver has a reaction time of T=0.2 s.
(a) Generate the open loop frequency response of the system as varies from 0.1 to 10 rad/s and hence obtain the gain margin Using the Nichols chart, determine the magnitude of the gain K that will result in a system with peak magnitude of the closed loop frequency response Mr equal to 2 dB. (15 marks)
(b) Estimate the damping ratio of the system based on Mr and the phase margin. Compare the results and explain the difference, if any. (5 marks)
(c) Determine the closed loop 3-dB bandwidth of the system. (5 marks)
Figure Q
Ziegler Nichols tuning Parameters
Control Mode Proportional Gain
KP
Integral Time
Ti
Derivative Time
Td
P 0.5 KPU - -
PI 0.45 KPU 0.83 TU -
PID 0.6 KPU 0.5 TU 0.125 TU
KPU = Ultimate Gain
TU = Ultimate Period
Figure Q
R(s) Desired direction of travel
Vehicle and front wheels
Human reaction time
r(t) c(t)
Power Amplifier
Gp(s) Plant
e(t) n(t) K=
K 1 =
Figure Q
D(s)
ΘL(s )
ΘR(s)
Digital Filter
ZOH
Plant
Special requirements for examination
- Nichols Chart Chartwell Graph data ref. 7514 (copy attached)