Download Machine Learning and Colliders and more Lecture notes Optics in PDF only on Docsity!
Machine Learning and Colliders
Elena Fol
R. Tomás, G. Franchetti
CERN
Goethe-University Frankfurt
Part I. Introduction to Machine Learning
- Tasks that are extremely easy and obvious for us are difficult to program in traditional ways
- Impossible to learn every possible rule to perform a task ➢ learn from examples instead Teaching machines to learn from experience
- Tasks that are extremely easy and obvious for us are difficult to program in traditional ways
- Impossible to learn every possible rule to perform a task ➢ learn from examples instead Teaching machines to learn from experience Cat?
High Energy Physics
- ML is used in dark matter search, jets recognition, particle tracking, neutrino classification, shower simulations Ben Nachman, CERN Data Science Seminars Medical Research: COVID- 19
1000 articles no arxiv.org related to ML applications to COVID19 research.
- Mostly image processing (x-ray images) and modeling of transmission.
Relevant ML concepts and definitions Supervised Learning Unsupervised Learning Reinforcement Learning
- Input/output pairs available
- Make prediction for unknown input based on experience from given examples - Only input data is given - Learn structures and patterns - No training data - Interact with an environment - Trying to learn optimal sequences of decisions
- Thomas M. Mitchell. Machine Learning. McGraw-Hill, Inc., New York, 1997. Object detection in computer vision, speech recognition, predictive control Anomaly detection, pattern recognition, clustering, dimensionality reduction Robotics, industrial automation, dialog systems "… computer programs and algorithms that automatically improve with experience by learning from examples with respect to some class of task and performance measure, without being explicitly programmed ." *
Supervised Learning Training input data Function with adjustable parameters (weights, bias) Model output Training output data Compute the loss (approximation error ): example 1^ e.g. MSE, MAE example 2 example 3 . . . 𝒚 = 𝒇 𝒙𝒊𝒘𝒊 + 𝒃 Neural Network as an example: ➢ Weights w of the inputs x ➢ Activation function f ➢ Output y of a single neuron: 𝑦 = 𝑓 σ^ 𝑥𝑖𝑤 + 𝑏 How does the learning work in practice? Universal Approximation Theorem: A simple neural network including only a single hidden layer can approximate any bounded continuous target function with arbitrary small error. (Cybenko, 1989, for sigmoid activation functions) w w w x x x Input Activation function Σ^ f Weighted sum b
Supervised Learning Training input data Function with adjustable parameters (weights, bias) Model output Training output data Compute the loss (approximation error ): example 1^ e.g. MSE, MAE example 2 example 3 . . . 𝒚 = 𝒇 𝒙𝒊𝒘𝒊 + 𝒃 Neural Network as an example: ➢ Weights w of the inputs x ➢ Activation function f ➢ Output y of a single neuron: 𝑦 = 𝑓 σ^ 𝑥𝑖𝑤 + 𝑏 How does the learning work in practice? Universal Approximation Theorem: A simple neural network including only a single hidden layer can approximate any bounded continuous target function with arbitrary small error. (Cybenko, 1989, for sigmoid activation functions) w w w x x x Input Activation function Σ^ f Weighted sum Adjust parameters Minimizing the loss e.g. Gradient Descent b
- Regression and Classification Models: resolve correlation between input variables and dependent target variables - Simple Linear Regression, Multivariate Regression, Logistic regression, Support Vector Machine
- Dimensionality reduction techniques: reduce the number of independent variables (features) without significant decrease on prediction accuracy - Independent Component Analysis, Principle Component Analysis, Features Importance Analysis
- Decision Trees : split the input data based on a sequence of variables (thresholds) to estimate the target output value or to separate data points into regions - Ensemble methods: Train several slightly different models and take majority vote/ average of the prediction
- Clustering: grouping or separating data objects into clusters
- Identify hidden patterns in the data, similarities and differences ML is more than Neural Networks…
- Regression and Classification Models: resolve correlation between input variables and dependent target variables - Simple Linear Regression, Multivariate Regression, Logistic regression, Support Vector Machine
- Dimensionality reduction techniques: reduce the number of independent variables (features) without significant decrease on prediction accuracy - Independent Component Analysis, Principle Component Analysis, Features Importance Analysis
- Decision Trees : split the input data based on a sequence of variables (thresholds) to estimate the target output value or to separate data points into regions - Ensemble methods: Train several slightly different models and take majority vote/ average of the prediction
- Clustering: grouping or separating data objects into clusters
- Identify hidden patterns in the data, similarities and differences ML is more than Neural Networks… Machine Learning is about learning from the data, not about application of a particular “intelligent” technique.
Adapting typical ML tasks to accelerator-specific problems
Image processing using Convolutional
Neural Networks is a very common
approach in ML research.
→ Image-based prediction of multiple beam parameters
"First steps toward incorporating image based diagnostics
into particle accelerator control systems using Convolutional
Neural Network", A.L. Edelen et al. NAPAC16 (TUPOA51)
- CNN and fully-connected ANN are used to incorporate
image-based and non-image-based data into the model to
predict multiple beam parameters via regression.
Predict the probability of an object present in a picture
Adapting typical ML tasks to accelerator-specific problems Reinforcement Learning is widely applied in robotics in control systems in general. (Coherent Synchrotron Radiation) (Radiofrequency cavities) → Automatic sub-systems tuning to achieve optimal machine performance
T. Boltz et al. “Feedback Design for Control of the Micro-Bunching Instability based
on Reinforcement Learning”, IPAC’19 (MOPGW017)
- Instabilities resulting from self-interaction of the bunch with its own radiation
field limits stable operation.
- Fast and adaptive feedback system to stabilize the dynamics is required.
→ Reinforcement Learning model based on “actions” = modifications in RF
and CSR signal as “reward”.
Learn how to walk/ jump/ avoid obstacles
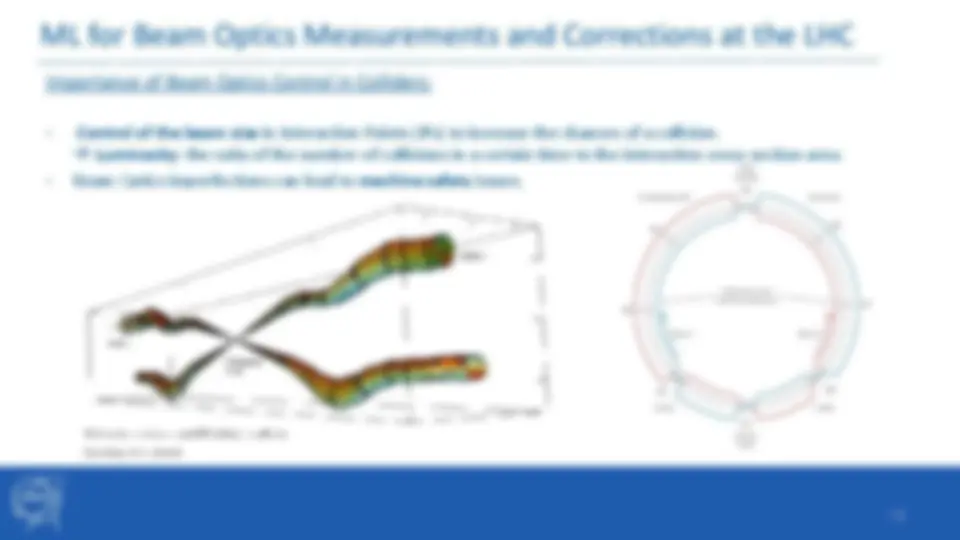
ML for Beam Optics Measurements and Corrections at the LHC Importance of Beam Optics Control in Colliders:
- Control of the beam size in Interaction Points (IPs) to increase the chances of a collision.
→ Luminosity: the ratio of the number of collisions in a certain time to the interaction cross-section area.
- Beam Optics imperfections can lead to machine safety issues. Courtesy of J. Jowett
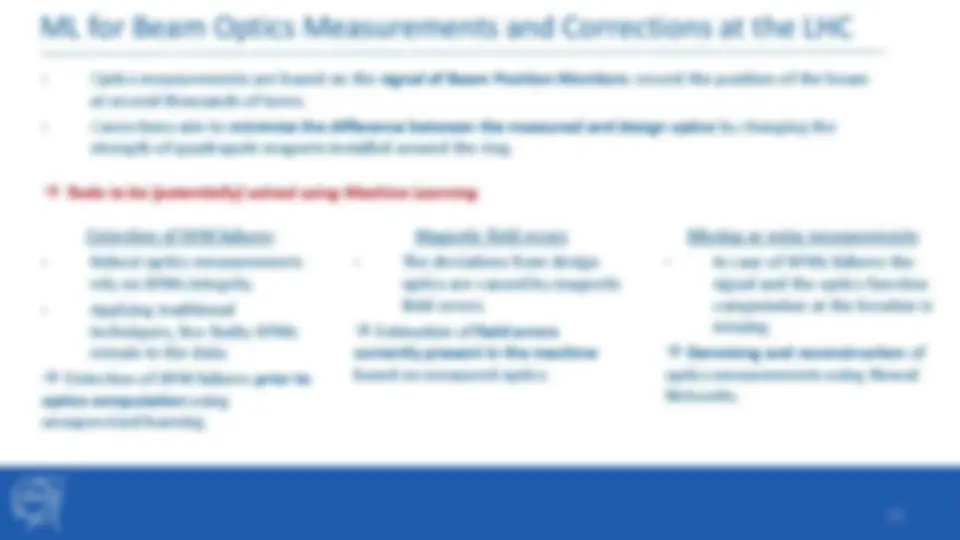
- Optics measurements are based on the signal of Beam Position Monitors : record the position of the beam
at several thousands of turns.
- Corrections aim to minimize the difference between the measured and design optics by changing the
strength of quadrupole magnets installed around the ring.
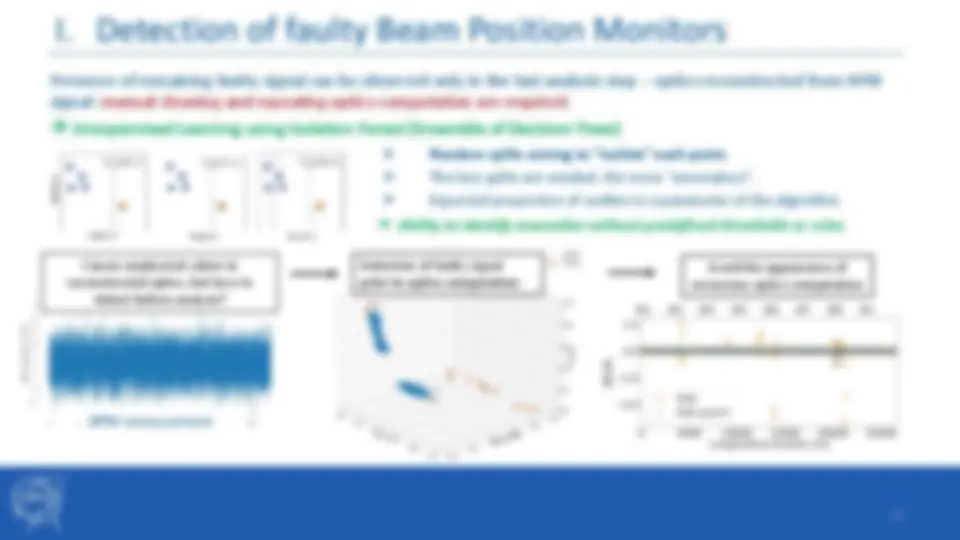
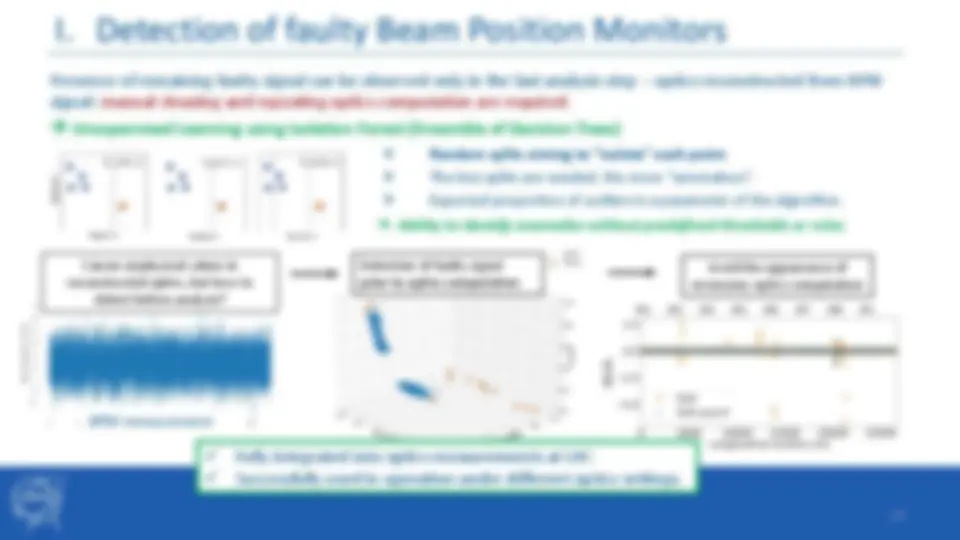
ML for Beam Optics Measurements and Corrections at the LHC
Detection of BPM failures
- Robust optics measurements
rely on BPMs integrity.
techniques, few faulty BPMs
remain in the data.
→ Detection of BPM failures prior to
optics computation using
unsupervised learning.
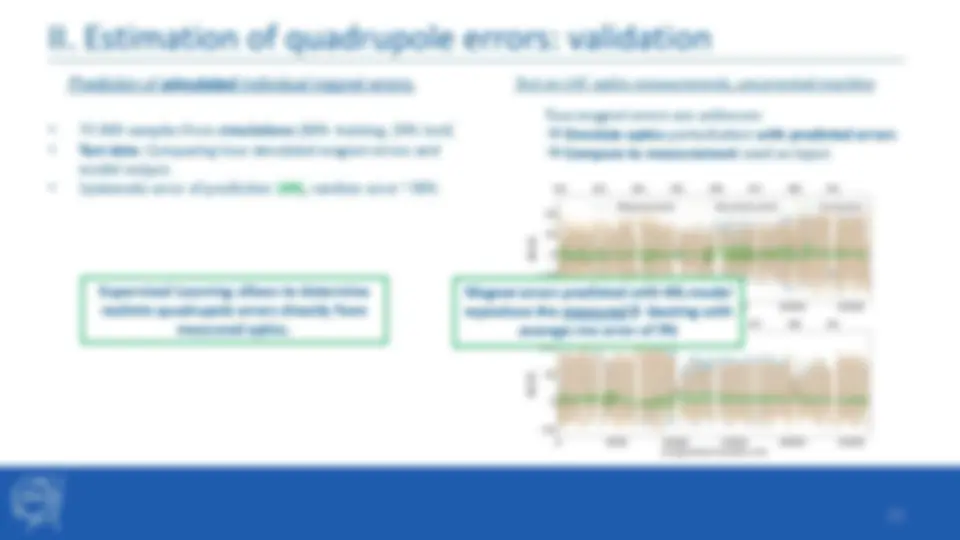
Magnetic field errors
- The deviations from design
optics are caused by magnetic
field errors.
→ Estimation of field errors
currently present in the machine
based on measured optics.
Missing or noisy measurements
- In case of BPMs failures the
signal and the optics function
computation at the location is
missing.
→ Denoising and reconstruction of
optics measurements using Neural
Networks.
→ Tasks to be (potentially) solved using Machine Learning