Download math 631 notes, fall 2018 and more Exercises Geometry in PDF only on Docsity!
Notes from Math 631, Algebraic Geometry I, taught at the University of Michigan, Fall
- Notes written by the students: Anna Brosowsky, Jack Harrison Carlisle, Shelby Cox, Karthik Ganapathy, Sameer Kailasa, Sayantan Khan, Michael Mueller, William C New- man, Khoa Dang Nguyen, Swaraj Sridhar Pande, Yuping Ruan, Eric Winsor, Yueqiao Wu, Jingchuan Xiao, Hua Xu, Jit Wu Yap, Hang Yin and Bradley Zykoski and edited by Prof. David E Speyer. Comments are welcome!
Contents
- September 5: Preview of algebraic geometry
- September 7: Basic definitions, slicing and projecting Basics of affine algebraic varieties
- September 12: Nakayama’s lemma; finite maps are closed
- September 14: Proof of the Nullstellansatz
- September 17: Affine varieties, regular functions, and regular maps
- September 19: Regularity, Connected Components and Idempotents
- September 21: Irreducible Components
- September 24: Projective spaces Projective varieties
- September 26: Pause to look at a homework problem
- September 28: Topology and Regular Functions on Projective Spaces
- October 1 : Products
- October 3 : Projective maps are closed
- October 5 : Proof that projective maps are closed
- October 8 : Finite maps Finite maps, Noether normalization, Constructible sets
- October 10: An important lemma
- October 12 : Chevalley’s Theorem
- October 17: Noether normalization, start of dimension theory Dimension theory
- October 19: Lemmas about polynomials over UFDs
- October 22: Krull’s Principal Ideal Theorem – Failed Attempt
- October 24: Krull’s Principal Ideal Theorem – Take Two
- October 26: Dimensions of Fibers
- October 29: Hilbert functions and Hilbert polynomials
- October 31: Bezout’s Theorem
- November 2: Tangent spaces and Cotangent spaces Tangent spaces and smoothness
- November 5: Tangent bundle, vector fields, and 1 -forms.
- November 7: Gluing Vector Fields and 1-Forms
- November 9 : Varieties are generically smooth
- November 12: Smoothness and Sard’s Theorem
- November 14: Proof of Sard’s theorem
- November 16: Completion and regularity
- November 19: Divisors and valuations Divisors and related topics
- November 21: The Algebraic Hartog’s theorem
- November 26: Class groups
- November 28: Linear systems and maps to projective space
- November 30: The canonical divisor, computations with the hyperelliptic curve
- December 3: Finite maps, Degree and Ramification Curves
- December 5: The Riemann-Hurwitz Theorem
- December 7: Sheaf cohomology and start of Riemann-Roch
- December 9: Overview of Riemann-Roch and Serre Duality
love!) the idea of a subject where the fundamental objects are well behaved and can be written down using a finite amount of data. What drew the mathematical community to this project was work of Weil. Here is an example of the sort of thing Weil was studying: Consider the equation y^2 = x^3 − x − 1. In C^2 , the solutions of these equations form a genus one surface with one puncture:
Weil was considering this equation (and many others) not over C, but over the finite fields Fpk. It is a good idea to add in one more solution, corresponding to the missing puncture. With this correction, the number of solutions over F 3 k is
1 , 7 , 28 , 91 , 271 , 784 , 2269 , 6643 , 19684 , 58807 · · ·
and turns out to be given by
3 k^ −
)k −
)k
More generally, for any prime p, there are complex numbers αp and αp, such that αpαp = p, such that the number of solutions over Fpk is
pk^ − αkp − αpk^ + 1. Weil realized that this formula can be thought of as det(Ak^ − Id)
where A is a 2 × 2 matrix with eigenvalues αp and αp. (In the p = 3 example, we could take A = [ (^) −^2 1 1^1 ].) Moreover, Weil gave an insightful way to think of this. The map Frob : (x, y) 7 → (xp, yp) is a permutation of the Fp solutions of this equation, and the Fpk solutions are the fixed
points of Frobk. Now, let’s go back to the complex case. The complex solutions (with the puncture filled in) look topologically like R^2 /Z^2. An endomorphism of R^2 /Z^2 looks like multiplication by a 2 × 2 integer matrix. And the number of fixed points of multiplication by Ak^ is det(Ak^ − Id)! Thus, Weil’s computations suggest that the curve y^2 = x^3 − x − 1 in some sense is of genus 1, and the map (x, y) 7 → (xp, yp) in some senselooks like multiplication by a 2 × 2 matrix of determinant p. This suggests a need to develop the language of algebraic topology to work over fields like Fp. The best reason to redevelop geometry in purely algebraic language, in my opinion, is to gain a new understanding of geometry. Just as learning French can teach you how English works, I found that learning algebraic geometry gives a new, clarifying perspective on the differential geometry and topology I supposedly already knew.
September 7: Basic definitions, slicing and projecting. Let k be an algebraically closed field. For a subset S of k[x 1 ,... , xn], we define
Z(S) = {(a 1 ,... , an) ∈ kn^ : f (a) = 0 ∀f ∈ S}.
For a subset X of kn, we define
I(X) = {(a 1 ,... , an) ∈ kn^ : f (a) = 0 ∀a ∈ X}.
We verified that
Proposition. The maps Z and I are inclusion reversing correspondences between subsets of k[x 1 ,... , xn] and subsets of kn.
Proposition. We have Z(I(X)) ⊇ X and I(Z(S)) ⊇ S.
Proposition. We have Z ◦ I ◦ Z = Z and I ◦ Z ◦ I = I.
Thus, Z ◦ I and I ◦ Z are inverses between the image of I and the image of Z. A set X ⊆ kn^ is called Zariski closed if X = Z(S) for some S. In other words, if X = Z(I(X)). In general, for X ⊆ kn, we put X = Z(I(X)) and call X the Zariski closure of X. You will check on the problem set that the Zariski closed sets are the closed sets of a topology and X is the closure of X. We could make a definition that a subset S of k[x 1 ,... , xn] is “geometrically closed” if S = I(Z(S)). However, in a week, we will in fact prove the Nullstellansatz, which says that S = I(Z(S)) if and only if S is a radical ideal. In the meantime, we discussed two important ways to reduce the number of variables.
Proposition (Slicing). Let X ⊂ kn+1^ be Zariski closed, with X = Z(S). Then X′^ := X ∩ {xn+1 = 0} is Zariski closed, with X′^ = Z(S ∪ {xn+1}).
Let π : kn+1^ → kn^ be the projection onto the first n coordinates. If X ⊂ kn+1^ is Zariski closed, then π(X) need not be Zariski closed. Consider X = {x 1 x 2 = 1}. Then π(X) = {x 1 6 = 0} which is not Zariski closed.
Proposition (Projection). Let X ⊂ kn+1^ be Zariski closed, with I = I(X). Then I(π(X)) is I ∩ k[x 1 ,... , xn], so Z(I ∩ k[x 1 ,... , xn]) = π(X).
A confusing point that was not explained well in class: This proposition started with a variety X and set I = I(X). If we start with I an ideal I and put X = Z(I), it is not clear
that Z(I ∩ k[x 1 ,... , xn]) = π(X). To see this, note that the situation is different when k is not algebraically closed. Indeed, consider the ideal I = 〈x^2 + y^2 + 1〉 in R[x, y]. The zero set of I, in R^2 , is ∅, so π(∅) = ∅ = ∅. But I ∩ R[x] = (0), and Z((0)) = R. For algebraically closed fields, this issue does not happen, but we will only be able to conclude this after we know the Nullstellansatz.
Lemma. The quotient ring R[y]/I is finitely generated as an R-module if and only if I contains a polynomial of the form yd^ + rd− 1 yd−^1 + · · · + r 1 y + r 0.
Proof. In one direction, if yd^ + rd− 1 yd−^1 + · · · + r 1 y + r 0 ∈ I, then R[y]/I is spanned by yd−^1 , yd−^2 ,... , y, 1. The reverse direction is left to homework. �
So we have the geometric conclusion:
Theorem. Let g ∈ k[x, y] be a polynomial of the form yd^ + gd− 1 (x)yd−^1 + · · · g 1 (x)y + g 0 (x). Then π : Z(g) → An^ is a closed map. For any ideal I containing g, we have π(X) = Z(I ∩ k[x]).
Geometrically, the difference between a monic polynomial y^2 − x^3 + x, and a nonmonic polynomial xy − 1, is that the zero locus of a monic polynomial does not have vertical asymptotes.
y^2 = x^3 − x xy = 1 A remark on motivation in the classical geometry case: It is also true, over k = R or C, that if g ∈ k[x, y] is monic in y, then π : Z(g) → kn^ is closed in the classical topology on kn. Proof: If h(y) = yd^ + hd− 1 yd−^1 + · · · + h 0 is a polynomial in k[y], and h(r) = 0, then |r| ≤ 1 + max(|hj |). (Exercise!) So
Z(g) ⊆ {(x, y) : |y| ≤ 1 + max(|gd− 1 (x)|,... , |g 1 (x)|), |g 0 (x)|).
The right hand side is proper over kn, and Z(g) is closed in it, so Z(g) → kn^ is proper and, in particular, closed. The figure below shows {y^2 = x^3 −x} as a subset of {|y| ≤ |x^3 −x|+1}:
September 14: Proof of the Nullstellansatz. Today, we prove the Nullstellansatz! We first want:
Lemma (Noether’s normalization lemma, first version). Let g(x 1 ,... , xn, y) be a nonzero polynomial with coefficients in an infinite field k. Then there exist c 1 ,... , cn ∈ k such that g(x 1 + c 1 y, x 2 + c 2 y,... , xn + cny, y) is monic as a polynomial in y.
For example, xy = 1 is not finite over the x-line, but (x + cy)y = 1 is finite over the x-line for c 6 = 0. Geometrically, this means that we can shear Z(g) so that make sure it has no vertical asymptotes.
xy = 1 (x + y)y = 1
Proof. Write g(x, y) = gd(x, y) + gd− 1 (x, y) + · · · + g 0 (x, y) where gj is homogenous of total degree j and gd 6 = 0. Then g(x 1 + c 1 y,... , xn + cny, y) = gd(c 1 , c 2 ,... , cn, 1)yd^ + (lower order terms in y). Since gd is a nonzero homogenous polynomial, the polynomial gd(t 1 ,... , tn, 1) is not zero. Since k is infinite, we can find some specific (c 1 ,... , cn) ∈ kn where gd(c 1 , c 2 ,... , cn, 1) 6 = 0. �
We now prove the Weak Nullstellansatz:
Theorem (Weak Nullstellansatz). Let k be an algebraically closed field and let I be an ideal of k[x]. If Z(I) = ∅ then I = (1).
Proof. We will be showing the contrapositive: If I 6 = (1), then Z(I) 6 = ∅ or, in other words, I ⊇ ma for some a ∈ kn. Our proof is by induction on n. For the base case, n = 1, since k[x] is a PID we have I = 〈g(x)〉 for some g and, since I 6 = (1), the polynomial g has positive degree. Then g has a root a, by the definition of being algebraically closed, and 〈g〉 ⊆ ma. We now turn to the inductive case; assume the result is known for k[x 1 ,... , xn] and let I be an ideal of k[x 1 ,... , xn, y]. If I = (0), the result is clearly true. If not, let g(x 1 ,... , xn, y) be a nonzero polynomial in I. By Noether’s normalization lemma, we may make a change of variables such that g is monic in y and thus k[x, y]/I is finite as a k[x]-module. Put J = I ∩ k[x 1 ,... , xn]. Since I 6 = (1), we also have J 6 = (1) so, by induction, there is some a ∈ Z(J) ⊆ kn. By yesterday’s result, we can lift (a 1 ,... , an) to some (a 1 ,... , an, an+1) ∈ Z(I) ⊂ kn+1. �
We can now prove the Strong Nullstellansatz, using a method called Rabinowitsch’s trick:
If we let AffVar denote the category of affine varieties and FGAlg denote the category of finitely generated k-algebras with no nilpotents, we have:
Theorem. The contravariant functor AffVarop^ → FGAlg taking a regular map ϕ : X → Y to its pullback ϕ∗^ : OY → OY , defines an equivalence of categories.
This theorem suggests that in some sense all of the information about an algebraic variety X is contained in its coordinate ring OX. Moving on, we recall that we have developed a notion of nice maps between algebraic varieties, namely regular maps. These play the role that smooth maps play in the category of smooth manifolds. When working with a smooth manifold M , one also has a notion of when a map f : M → R is smooth at some point x ∈ M. We will soon state the appropriate notion of regularity of a map f : X → k at some point x ∈ X. In fact, we define such a notion for a function on any subset of An:
Definition. Let X be any subset of An. A function f : X → k is regular at x ∈ X if there exist g, h ∈ k[x 1 ,... , xn], with h(x) 6 = 0, such that
f =
g h
on a Zariski open neighborhood of x.
Continuing our analogy with manifold theory, we recall that a map f : M → R is smooth if and only if it is smooth at every point x ∈ M. The analogous fact for regular maps is stated below, and we will cover the proof in class soon:
September 19: Regularity, Connected Components and Idempotents. We start with a proof of the theorem mentioned last time.
Theorem. Let X be a Zariski closed subset of An. A function f : X → k is regular if and only if f is regular at every x ∈ X.
Proof. Suppose that f : X → k is regular. Then, we can choose g = f , and h = 1 so that we have f = (^) hg on all of X, which is a neighborhood of every point x ∈ X. Thus, f is regular at every point. Now suppose that f : X → k is regular at every point x ∈ X. We can find an open neighborhood Vx, and rational functions gx, hx ∈ k[x 1 ,... , xn], with hx(y) 6 = 0, ∀y ∈ Vx, and f (y) = (^) hgxx((yy)) , or hx(y)f (y) = gx(y), ∀y ∈ Vx.
Note that Vx ⊂ X is open in X implies that X \ Vx is closed in X (which is closed in An), and so X \ Vx is a closed subset of An^ and is thus an affine variety. Now, since X \ Vx is closed and x is not in X \ Vx, we have some polynomial p ∈ I(X \ Vx) such that p(x) 6 = 0. Now we can take V (^) x′ = Vx ∩ {y ∈ X|p(y) 6 = 0}, g x′ = p ∗ gx, and h′ x = p ∗ hx so that we have h′ x(y)f (y) = g′ x(y), ∀y ∈ X. Let J = ({h′ x|x ∈ X}), the ideal generated by the h′ xs. Note that for each x ∈ X, we have h′(x) 6 = 0, so, by invoking the Nullstellansatz, the ideal I(X) + J = (1). Thus we can write
1 = q(y) +
ai(y) ∗ h′ i(y)
for y ∈ An, where q ∈ I(X), ai ∈ k[x 1 ,... , xn], and h′ i ∈ J. Now for y ∈ X, we have 1 =
ai(y) ∗ h′ i(y), and multiplying by f on both sides we get f (y) =
ai(y) ∗ g′ i(y), for y ∈ An, so f is a polynomial restricted to X. �
It is important to note that the requirement that X was Zariski closed (as apposed to being an open subset of a zariski closed set) is necessary. For example, the function f : A^1 \ { 0 } → A^1 \ { 0 } defined by f (y) = 1/y is regular at every point y 6 = 0, but it is not a polynomial. It is also important to note that not every regular function on an open subset of a zariski closed set is given by a quotient of polynomials. For example, let X = Z(x 1 x 2 − x 3 x 4 ) ⊂ An, and U = X \ Z({x 2 , x 3 }, and define f (x 1 , x 2 , x 3 , x 4 ) = x x^13 if x 3 6 = 0, and f (x 1 , x 2 , x 3 , x 4 ) = x x^24 if x 4 6 = 0; there is no single expression gh for this f with h nonzero on all of U. We now turn our attention to the notion of connectedness of affine varieties. Recall that a topological space X is said to be disconnected if we can find X 1 , X 2 ⊂ X such that X 1 ∪ X 2 = X, X 1 ∩ X 2 = ∅, and X 1 , X 2 6 = ∅. A space is connected if it is not disconnected.^3 Assuming that an affine variety X ⊂ An^ is disconnected, we can find find X 1 , X 2 ⊂ X as above, and define f (x) = 0, if x ∈ X 1 , and f (x) = 1, if x ∈ X 2. Note that this function is regular at every x ∈ X. By our result above, it must be given by a polynomial in OX. Also note that our f is idempotent, meaning f 2 = f. Now suppose we are given an affine variety X, and a idempotent element, f , of OX , with f 6 = 0, 1 (such an idempotent is called nontrivial). Then we can define X 1 = f −^1 ({ 0 }), and X 2 = f −^1 ({ 1 }), and check that these have the properties X 1 ∪ X 2 = X, X 1 ∩ X 2 = ∅, and X 1 , X 2 6 = ∅, using the fact that we must have either f (y) = 0 or f (y) = 1. Thus we have proved
Theorem. An affine variety X is connected ⇐⇒ its coordinate ring OX contains no nontrivial idempotent elements.
In fact, we have proved slightly more: we have given a bijection between the (ordered) pairs of subspaces that disconnect X and nontrivial idempotent of Ox. Now, a useful lemma from algebra says that
Lemma. A ring contains nontrivial idempotents ⇐⇒ it is the direct sum of two nontrivial rings.
Combining this with our result above, we get that
Theorem. An affine variety X is connected ⇐⇒ its coordinate ring is not the direct sum of two nontrivial rings.
September 21: Irreducible Components. We state Hilbert’s Basis theorem, which we proved in the 2nd problem set:
Theorem (Hilbert’s Basis Theorem). Finitely generated k-algebras are noetherian rings.
Theorem (Hilbert’s Basis theorem, Restatement 1). Every ideal in the polynomial ring k[x 1 ,... xn] is finitely generated.^4
One implication of the above restatement is that the zero set of any ideal can be realized as the zero set of finitely many polynomials.
(^3) In Professor Speyer’s opinion, the empty set is neither connected nor disconnected, just as 1 is neither prime nor composite. But not everyone will agree on this point. (^4) Even though the initial proofs of the theorem weren’t constructive, now we can explicitly construct
generators of a given ideal in the polynomial ring. See Gr¨obner Basis.
If the tree is finite, then X is the union of the irreducible labels of the leaves, as desired. If the tree is infinite, then it has an infinite path. This corresponds to a chain of varieties X ) X 1 ) X 2 ) · · · , a contradiction. �
The result about decomposing topological spaces into connected components also has a uniqueness clause; can we expect something similar for the above decomposition? On the face of it, no.
However, notice that the problem arised when we threw in irreducible subvarieties which are contained in bigger irreducible subsets of X. We can prevent this by defining:
Definition. Let X be a Zariski closed subset of An. Y ⊆ X is an irreducible component of X if
- Y is irreducible,
- Y is closed in X, and
- @ Y ′ irreducible and closed in X such that Y ( Y ′ . Looking back at the above example, the single point was not an irreducible component of Z(xy).
Theorem (Irreducible Decomposition). Let X be Zariski-closed in An. Then,
(1) If X =
⋃N
i=1 Xi, with^ Xi^ irreducible, and^ Z^ ⊆^ X^ is irreducible, then^ Z^ is contained in one of the Xi. (2) If X =
⋃N
i=1 Xi, with^ Xi^ irreducible, then each irreducible component is equal to one of the Xi. (3) X has finitely many irreducible components. (4) X is the union of its irreducible components. Since irreducible components of X are the maximal irreducible closed subvarieties of X, they correspond to minimal primes in the coordinate ring of X.
Proof. To prove (1), note that Z =
i(Z^ ∩^ Xi). Since^ Z^ is irreducible and^ Z^ ∩^ Xi^ is closed in Z, this means that one of the Z ∩ Xi equals Z, so, for that i, we have Z ⊆ Xi. For (2), let Y be an irreducible component of X. By (1), we know that Y is contained in some Xi. But, by the definition of being an irreducible component, this implies that Y = Xi. For (3), we have just shown that all the irreducible components occur in the finite list X 1 , X 2 ,... , XN , so there are finitely many. We finally come to (4). Choose a decomposition X =
⋃N
i=1 Xi^ into irreducible subvarieties where N is minimal. Suppose, for the sake of contradiction that one of the Xi is not an irreducible component; without loss of generality let it be XN. So XN ( X′^ for some irreducible X′. Using (1), we have X′^ ⊆ Xj for some j, and this j must not be N. So
XN ( X′^ ⊆ Xj and thus
⋃N
i=1 Xi^ =^
⋃N − 1
i=1 Xi, contradicting minimality.
September 24: Projective spaces. We’ll now start to see projective varieties in projective spaces. To start with, we settle some notations: Let k denote a algebraic closed field, V denote a finite dimensional k-vector space, and P(V ) = (V − { 0 })/k∗^ the projective space. Write Pn^ = P(k⊕(n+1)). We’ll use (z 1 , · · · , zn+1) to denote the coordinates on kn+1, and [z 1 : z 2 : · · · : zn+1] to denote homogeneous coordinates on Pn. The first observation is that inside Pn, there sits a copy of An, via the inclusion map
i : An^ → Pn, (z 1 , · · · , zn) 7 → [z 1 : z 2 : · · · : zn : 1].
We then have a decomposition Pn^ = An^ ∪ Pn−^1 = {zn+1 6 = 0} ∪ {zn+1 = 0}. Similarly, if V = H ⊕ k, where H is a hyperplane, we have P(V ) = H ∪ P(H) = {[h : 1]} ∪ {[h : 0]}. The reason why we’re considering the projective space is to try to draw an analogy to the fact in manifold theory that every compact manifold can be embedded in some Rn. However, there are no positive dimensional subvarieties of An^ which deserve to be called compact. (Literally speaking, An^ is compact in the Zariski topology, but we will see soon that this is misleading.) Pn^ does deserve to be called compact, as we will soon see. In this course we will see:
- Affine varieties: Closed subsets of An.
- Quasi-affine varieties: Open subsets of affine varieties.
- Projective varieties: Closed subsets of Pn.
- Quasi-projective varieties: Open subsets of projective varieties.
Figure 1 shows their relations. We won’t deal with any notion of variety more abstract than a quasi-projective variety in this term. More general abstract notions of variety could make a great final project, though! There are three ways to talk about projective spaces:
- Work in V − { 0 } and do dilation invariant things.
- Work in homogeneous coordinates: If g ∈ k[x 1 , · · · , xn+1] is a homogeneous polyno- mial, then Z(g) is a well-defined subset of Pn.
- Work locally in an affine chart, i.e., split V = H ⊕ k and think of H ⊆ P(V ). For example, we can cover P^2 with homogeneous coordinates [x 1 : x 2 : x 3 ] using three charts {xi 6 = 0}, i = 1, 2 , 3.
Example. Let’s look at a curve in different coordinate charts. Consider the curve x^21 + x^22 = x^23 in P^2. On chart {x 3 6 = 0}, the equation becomes (x x^13 )^2 + (x x^23 )^2 = 1, and this is a circle.
On chart {x 1 6 = 0}, the equation is 1 + (x x^21 )^2 = (x x^31 )^2 , which illustrates a hyperbola.
Corresponding to the three ways of talking about projective spaces, we have three ways of describing the topology on Pn:
Definition. A set X is closed in P(V ) if one of the following holds:
- π−^1 (X) is closed in V − { 0 }, or equivalently, π−^1 (X) ∪ { 0 } is closed in V , where π : V − { 0 } → P(V ) is the projection map;
- X =
g∈S
Z(g), where S is a set of homogeneous polynomials in k[x 1 , · · · , xn+1].
- X ∩ H is closed in every affine chart H, or equivalently, X ∩ {xj 6 = 0} is closed in {xj 6 = 0} ∼= An, ∀j.
We also have three ways to define a regular function on Pn:
Definition. Let X ⊂ Pn, and x ∈ X. f : X → k is a function. We say f is regular at x if one of the following holds:
- f ◦ π is regular on π−^1 (X) at ˜x, where ˜x ∈ V − { 0 }, and π(˜x) = x.
- f = gh on an open neighborhood of x ∈ X, where g, h are homogeneous polynomials of the same degree, and h(x) 6 = 0.
- f |H is regular at x for every affine chart H containing x, or equivalently, f |H is regular at x for an affine chart H containing x.
September 26: Pause to look at a homework problem. Today we looked at various ways of solving the tricky homework question of splitting a variety into irreducible pieces. The variety in question is X = Z(wy − x^2 , xz − y^2 ). We want to think geometrically; what are the solutions?
(1) Suppose x = 0, then y = 0 so the solutions are of the form
(w, 0 , 0 , z) and A^2 ∼= X 1 := {x = y = 0} ⊂ A^4.
(2) Suppose x 6 = 0, then wy = x^2 so w, y 6 = 0 and w = x 2 y ,^ z^ =^
y^2 x. Thus the solutions are of the form (^) ( x^2 y
, x, y,
y^2 x
which is a geometric progression!
There are now two modes of thought on how to proceed for defining this second component of the variety:
X 2 ′ := {geometric progressions} or X 2 ′′ := Z(wy − x^2 , xz − y^2 , wz − xy).
These end up being the same set, but the proofs proceed differently. For visualization purposes, its easiest to draw the relation between these sets projectively.
Method 1: From the geometric progression perspective, a sequence (w, x, y, z) is a geo- metric progression if and only if it is of the form (u^3 , u^2 v, uv^2 , v^3 ). So let’s define ϕ : A^2 → A^4 via (u, v) 7 → u^3 , u^2 v, uv^2 , v^3 ). We’ll see on the homework that if X and Y are topological spaces, φ : X → Y is a continuous surjection, and X is irreducible, then Y is irreducible. Thus this image is X 2 ′ and is irreducible. Method 2: Try to prove that R := k[w, x, y, z]/〈wy − x^2 , xz − y^2 , wz − xy〉 is a domain. (This actually would also prove that the ideal is radical, but luckily that is true). We could show that R ∼= k[u^3 , u^2 v, uv^2 , v^3 ] ⊂ k[u, v]. This map is clearly onto, but what about the kernel? Suppose g(u^3 , u^2 v, uv^2 , v^3 ) 6 = 0, we’ll reduce with respect to a Gr¨obner basis. Using lex order with w > z > y > x, then wy − x^2 , xz − y^2 , wz − xy is already a Gr¨obner basis, and so we can keep doing replacements with these generators to decrease the w and z degrees. Thus we can write g ≡
gijkwixj^ ykz^ where either i = k = 0, i = = 0, or j = k = 0. We can graph the possible exponents of monomials uavb, and from the picture we can see that there is no cancellation between the terms contributed by wixj^ , by xiyk, and ykz. So g must actually be zero, and this is an isomorphism.
wixj^7 → u^3 i+2j^ vj xj^ yk^7 → u^2 j+kvj+2k ykz^7 → ukv^2 k+3
u
v^6
��
��
��
��
��
�
�
�
�
�
�
�
y � kz`
xiyk
wixj
q q q q q q
q q q q q q
q q q q q q
q q q q q q
Method 3: Someone in class proposed to look at the map A^4 → A^4 where (a, b, c, d) 7 → (ac, ad, bc, bd), which we can restrict to a map Z(ad^2 − bc^2 ) → X 2 ′′. Some algebra has to be checked, but this probably works. Method 4: Let’s prove X 2 = Z(〈wy − x^2 , xz − y^2 , wz − xy〉) is irreducible. We see that X 2 ∩ {w 6 = 0} implies that
p :=
x w
q :=
y w
x^2 w^2
r :=
z w
x^3 w^3
so that q = p^2 , r = p^3. The intersection of X 2 with {w 6 = 0} is thus clearly irreducible. Put U = X 2 ∩ {w 6 = 0}. (This paragraph, added by Professor Speyer, is what he would have said if we were enough on the ball, and he still feels like it is a lot longer than it should be.) Let X 2 =
Yi is the decomposition into irreducible components. So X 2 ∩ U =
(Yi ∩ U ) so we have Yi ∩ U = U for some Yi, let’s say Y 1. We claim each irreducible component Yj other than Y 1 must be contained in {w = 0}. To see this, suppose for the sake of contradiction that Yj ∩ U is nonempty. Then Yj ∩ U is dense in Yj , since Yj is irreducible. But Yj ∩ U would lie in Y ∩ U = Y 1 ∩ U ⊂ Y 1 , so a dense subset of Yj would lie in Y 1 , and thus Yj ⊆ Y 1 , a contradiction. We thus see that any other irreducible component of X 2 must be contained in {w = 0}. But X 2 ∩ {w = 0} is easily checked to be the z-axis, and the z-axis is easily checked to be in the Zariski closure of X 2 ∩ U.
September 28: Topology and Regular Functions on Projective Spaces. There are three ways of thinking about almost anything in projective space – by coning and working
In the case of quasi-affine varieties, the product of varieties sitting inside Am^ and An^ are actually varieties sitting inside Am+n. However, we say in one of the problem sets that the Zariski topology on the product X × Y of affine varieties X and Y is not the same as the product topology on X ×Y (unlike the categories of topological spaces, or smooth manifolds). The regular functions on X × Y are just polynomials in {x 1 ,... , xm} and {y 1 ,... , yn}, where the {xi} are coordinate functions on Am, and {yj } are coordinate functions on An. If we want to describe the ring of regular functions on X × Y in more algebraic terms, we have the following description.
OX×Y ∼= OX ⊗k OY
Proposition. For any affine variety Z, and maps fX : Z → X and fY : Z → Y , there exists a unique map fX×Y : Z → X × Y , which make the following diagram commute.
Z
X × Y
X Y
∃!fX×Y fX fY
πX πY
Proof. There can clearly exist at most one such map, i.e. fX×Y = (fX , fY ), since regular functions are also set functions. The only thing we need to verify is that this is actually a regular map, but that follows by checking on each coordinate. �
When dealing with projective varieties though, products get a little harder. It’s not even clear what Pm^ × Pn^ is (it’s certainly not Pm+n). But here’s a more fundamental question: what is the topology we want on Pm^ × Pn, and what are the functions we want to call regular on Pm^ × Pn? The answer to the first question is that a subset U of Pm^ × Pn^ is open if U ∩ (Am^ × An) is open for all affine open sets in Pm^ × Pn. In a similar spirit, we call a function f : Pm^ × Pm^ → k regular if the restriction to each affine open chart as before gives a regular function. Now we know that the product of Pm^ × Pn^ looks like locally: it locally looks like an affine variety. We still don’t know whether this a projective variety or not. The Segre embedding answers our question, by realizing Pm−^1 × Pn−^1 as a closed subset of Pmn−^1. As the name suggests, it’s an injective map μ from Pm−^1 × Pn−^1 to Pmn−^1.
μ : ([x 1 : · · · : xm], [y 1 : · · · , yn]) 7 → [x 1 y 1 : · · · : xmyn]
A basis independent way of writing the same map is the following.
μ : ([v], [w]) 7 → [v ⊗ w]
We want to show that the map μ is an embedding, i.e. it’s injective, its image is closed, and the inverse map from the image is also regular. To show all these results, the following lemma will be useful.
Lemma. If we restrict μ to the chart where xm 6 = 0 and yn 6 = 0, then we get a map from Am−^1 × An−^1 to Amn−^1 which has a regular right inverse σ.
Proof. Restricting to the given coordinate charts, and normalizing the coordinates so that xm = 1, and yn = 1, the map μ is given by the following formula.
μ([x 1 : · · · : xm− 1 : 1], [y 1 : · · · : yn− 1 : 1]) =
x 1 y 1 x 2 y 1 · · · y 1 x 1 y 2 x 2 y 2 · · · y 2 .. .
x 1 yn− 1 x 2 yn− 1 · · · yn− 1 x 1 x 2 · · · 1
From this formula, it’s easy to see what the right inverse will be: simply the projection onto the last rows and columns. That also tells us why the inverse is regular. �
Now we’ll use this lemma to get the properties we want from μ.
Corollary. The map μ must be injective.
This follows because any map that has a right inverse must be injective.
Corollary. The image of μ is a closed set.
Proof. It suffices to check the intersection of the image with each affine chart is closed. Let’s check the affine chart zmn 6 = 0. On this open set, the image is the image of μ when restricted to the open sets of the lemma. Now we use the fact that σ is the right inverse to μ. That means σ−^1 (Am−^1 × An−^1 ) is exactly the image of μ. But since σ is a regular map, the pre-image of a closed set is closed, which gives us the result. �
Corollary. The map from μ(Pm−^1 × Pn−^1 ) to Pm−^1 × Pn−^1 is regular.
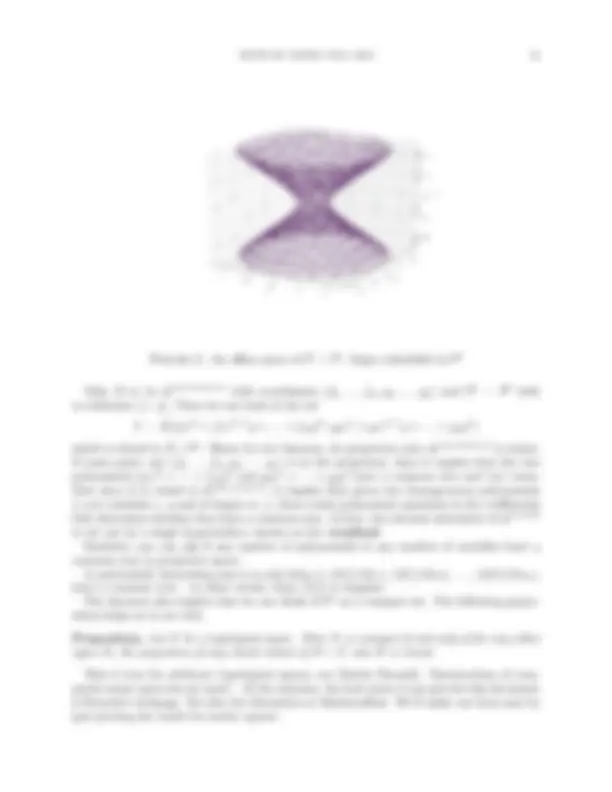
We already know that the inverse map locally is regular, thanks to the lemma. But that’s all we need, since to prove regularity, it suffices to check locally. Now what we’re interested in knowing is what the image of P^1 × P^1 looks like when it’s sitting inside P^3. To make visualization simpler, we’ll assume we’re working over the field C. The map from CP^1 × CP^1 to CP^3 is given by ([x 1 : x 2 ], [y 1 , y 2 ]) 7 → [x 1 y 1 : x 1 y 2 : x 2 y 1 : x 2 y 2 ]. The image is the zero set of the polynomial z 1 z 4 − z 2 z 3. We can change coordinates to make this polynomial easier to visualize. We pick new coordinates [w 1 : w 2 : w 3 : w 4 ], where z 1 = w 1 + iw 2 , z 4 = w 1 − iw 2 , z 2 = w 3 + iw 4 , and z 3 = w 3 − iw 4. In these new coordinates, our polynomial becomes w 12 + w 22 = w^23 + w^24. We now restrict to the set where w 4 6 = 0, and we normalize w 4 to be 1. That makes the polynomial w 12 + w 22 = w^23 + 1, in the affine chart isomorphic to C^3. Complex three space is too high dimensional to visualize, so we just look at the real part of this variety. We get something that looks like Figure 2. Notice that this is covered with two families of lines. One is lines of the form P^1 × {point}, and the other is lines of the form {point} × P^1.
October 3 : Projective maps are closed. Today we discussed the following important theorem.
Theorem. Let B be a quasi-projective variety and let X be closed in B × Pn. Let π : B × Pn^ → B denote the projection map. Then π(X) is closed.
The proof will be given on Friday and we first talked about some applications and the significance of it.