


MECHANICAL VIBRATIONS-MENG 4
LECTURE 2
TUTORIALS AND CONSTANT ENERGY METHOD
Mechanical & Maintenance Engineering Dept. FBC/USL/STN-MECH VIB MENG 424









































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Mechanical Vibration theories and calculations
Typology: Lecture notes
1 / 55

This page cannot be seen from the preview
Don't miss anything!
TUTORIALS AND CONSTANT ENERGY METHOD
Mechanical & Maintenance Engineering Dept. FBC/USL/STN-MECH VIB MENG 424
STEPWISE APPROACH TO SOLVING/ANALYSING MECHANICAL VIBRATIONS PROBLEMS USING
NEWTON’S METHOD
terms in those variable only.
each coordinate
spring deflection under a fixed mass loading or rotational as in the case of a
pendulum system
Mechanical & Maintenance Engineering Dept. FBC/USL/STN-MECH VIB MENG 424
Newton’s or the energy conservation method. Do not forget to use
consistent units in the equations.
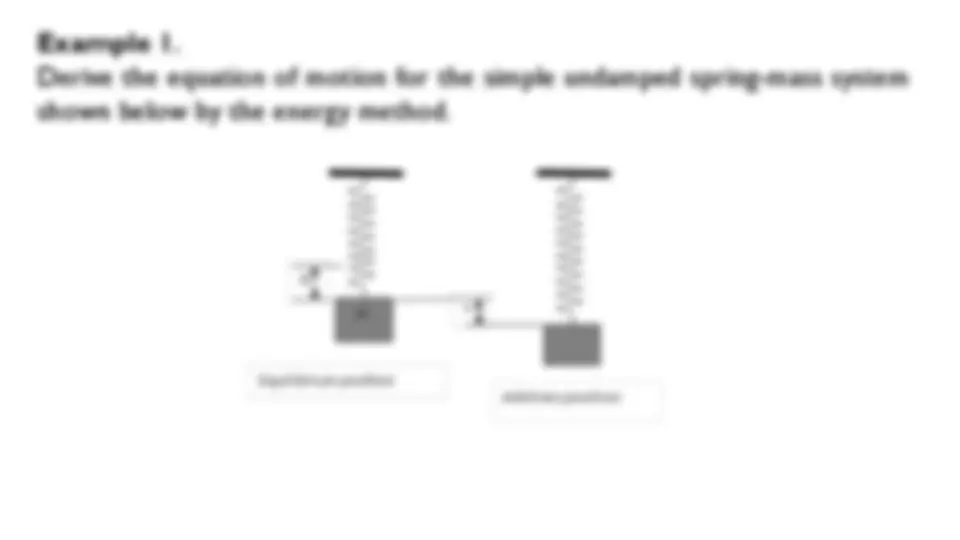
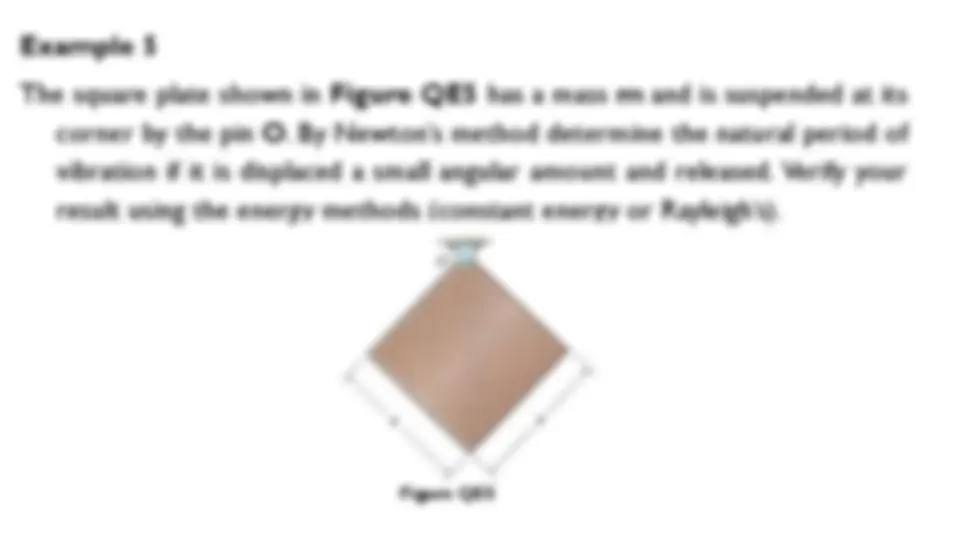
Example 1.
The motion of a particle is described by the equation 𝒙 = 𝟎. 𝟐 𝒄𝒐𝒔𝟏𝟎𝝅𝒕 +
𝝅
𝟑
), where 𝒙 is expressed in metres and t in seconds.
Determine
(a ) The period of the resulting motion.
(b) Its amplitude and
(c) Its phase angle.
Mechanical & Maintenance Engineering Dept. FBC/USL/STN-MECH VIB MENG 424
Solution:
Given the equation of motion of a particle as 𝑥 = 0. 2 𝑐𝑜𝑠10𝜋𝑡 +
𝜋
3
), let us simplify to get it into the standard form
𝑥 = 𝐴𝑠𝑖𝑛 𝜋𝑡 + 𝐵𝑐𝑜𝑠𝑡 ……………………………..(i)
Where A and B are constants.
𝑥 = 0. 2 𝑐𝑜𝑠10𝜋𝑡 + 0. 15 sin(10𝜋𝑡 −
𝜋
3
Mechanical & Maintenance Engineering Dept. FBC/USL/STN-MECH VIB MENG 424
Where X is the amplitude and the phase angle
Expanding equation (iii) we have;
𝑥 = 𝑋𝑠𝑖𝑛 10𝜋𝑡 + 𝜑 = 𝑋𝑠𝑖𝑛10𝜋𝑡𝑐𝑜𝑠𝜑 + 𝑋𝑐𝑜𝑠10𝜋𝑡𝑠𝑖𝑛𝜑 …………………..(iv)
Comparing equations (ii and iv) by comparing coefficients of sin10лt
and cos10лt we have;
𝑋𝑠𝑖𝑛𝜑 = 0. 070 ………………………………….(v)
𝑋𝑐𝑜𝑠𝜑 = 0. 075 ………………………………….(vi)
Squaring and adding both sides of equations (v) and (iv) we have;
2
2
= 0. 075
2
2
2
𝑐𝑜𝑠𝜑
2
2
= 0. 010525 ,
𝑋 = 0. 010525 = 0.1026 m
(a)Dividing equation (v) by (vi), we have;
𝑋𝑠𝑖𝑛𝜑
𝑋𝑐𝑜𝑠𝜑
=
070
075
→ 𝑡𝑎𝑛𝜑 = 0. 9333 ,
− 1
𝒐
Solution.
Step 1 ;
Draw the free body diagram for each independent rigid body in the system.
Forces and moments acting are as follows;
(1)Tensions in spring T=kx (1)
Moment of the frictional force = M f
f
r
(2)Weight of body W=mg (2)
(“Inertia of turning forces”)=I
(3)Normal reaction= R N
(4)Friction at point of contact= F f
(5)Inertia force = m xሷ
Step 2 ;
Write down all force and moment balance equations;
(i)When the body is displaced by x, the equation of motion,
σ (^) 𝐹 𝑥
𝑓
σ (^) 𝐹 𝑥
𝑓
− 𝑘𝑥 = 𝑚 𝑥ሷ …………….…………..(i)
Considering the y-direction we have;
σ (^) 𝐹 𝑦
𝑁
− 𝑚𝑔 = 0 ……….…………………….…………..(ii)
(No motion in the y-direction)
𝑘
𝑚+
𝐼 𝑐𝑔
𝑟
2
Hence 𝑥ሷ +
2
𝑥 = 0 𝜔 =
𝑘
𝑚+
𝐼 𝑐𝑔
𝑟
2
𝟐л
𝒄𝒈
𝟐
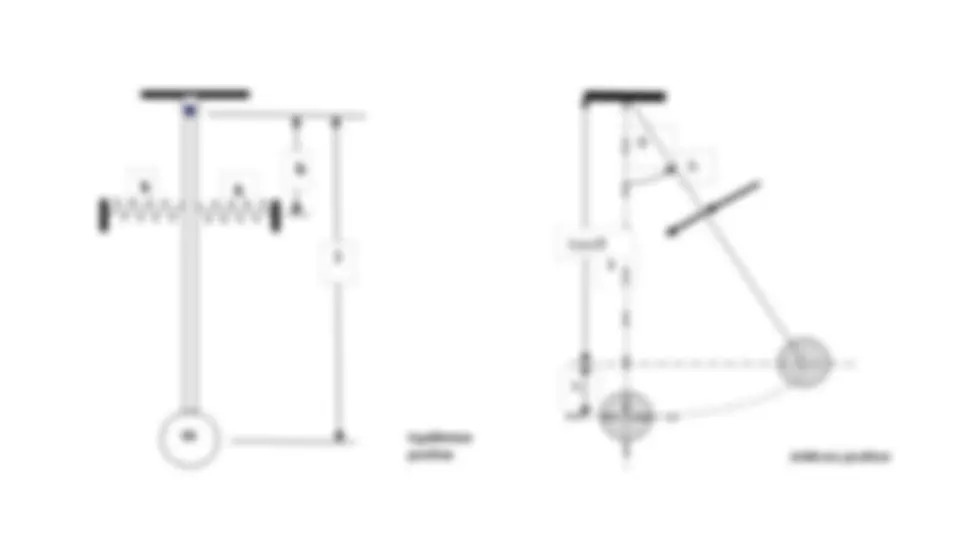
Example 3.
Using Newton’s method derive the equation of motion of the mass m for
small angular displacement , hence determine the angular frequency and
period of free oscillations of the spring loaded pendulum shown in Figure
Q 3 below with spring stiffness being k and assuming the connecting rod is
massless.
Figure Q
Solution;
For the spring loaded pendulum if an
infinitesimal angular displacement is given to the
mass m either to the left or right of the mean/ rest
position as show in the free body diagram below
we have,
σ (^) 𝑀 𝐻
𝜃 = −𝑘𝑏𝑠𝑖𝑛. 𝑏 − 𝑘𝑏𝑠𝑖𝑛. 𝑏 − 𝑚𝑔𝑠𝑖𝑛. 𝑙 ……………………..(i)
For very small , we have sin 𝜃 ≈ 𝜃 , so we have
2
𝜃 + 𝑘𝑏
2
𝜃 + 𝑚𝑔𝑙𝜃 = 0
2
If 𝐼 = 𝑚𝑙
2
, we have,
2
2
𝟐
= 𝟎 ; this is the equation of motion of the mass m
Where
2
=
2
2
2
2
Hence the period of small oscillation is;
𝟐л
= 𝟐л
𝟐
𝟐
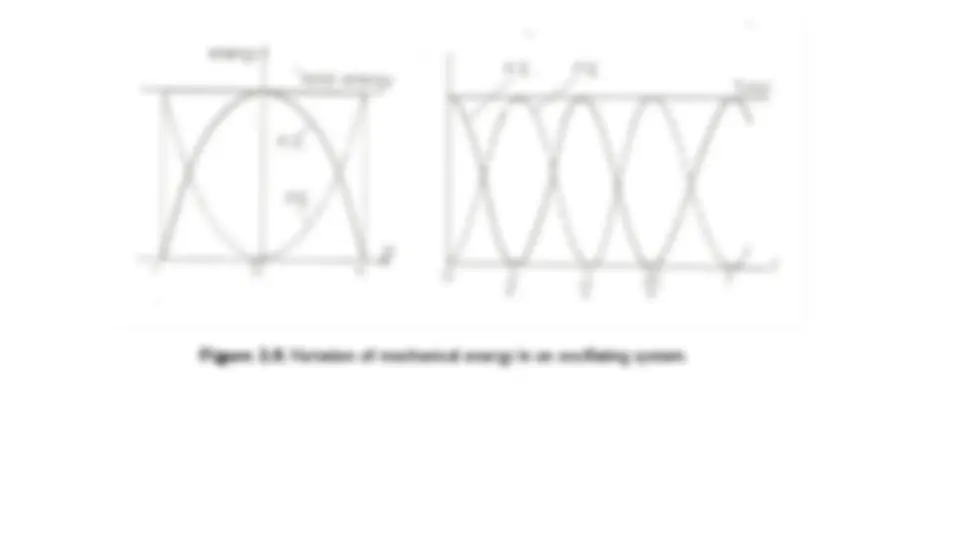
T+V= constant. Differentiating with respect to time yields;
If the kinetic and potential energies are expressed as function of an
appropriate position coordinate (linear(x) or angular ( or )), performing the
differentiation with respect to time as indicated in equation above will yield the
required differential equation of motion.
In summary, the stepwise approach for deriving the equation of motion using
the energy method is as follows;
(1)Choose a coordinate x that describes the position of the rigid body,
noting that x must be zero in the equilibrium position.
(2)Write the expression for the potential energy in an arbitrary position.
When making small displacement approximations, we must bear in mind
that quadratic as well as linear terms in x must be kept.
(3)Write the expression for the kinetic energy in an arbitrary position.
(4)Sum the energies (potential and kinetic) and equate to a constant.
(5) Perform the differentiation on the expression for total energy in step ( 4 ).