



Mechanics
Physics 151
Lecture 11
Rigid Body Motion
(Chapter 5)






Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Mechanics, Physics, Rigid Body Motion, Heavy Top, Conserved Momenta, Energy Conservation, 1-D Equation of Motion, Qualitative Behavior, Nutation, Magnetic Dipole Moment, Elementary Particles, electrons, protons, Magnetic moment, Anomalous Magnetic Momen.t
Typology: Study notes
1 / 21

This page cannot be seen from the preview
Don't miss anything!
Rigid Body Motion
(Chapter 5)
Administravia
Critical feedback for me
to evaluate how well (or badly) I’m teaching
to adjust the level of the course according to your needs
to receive your suggestions for improvements
Be critical, and be specific
I can’t fix them if you don’t tell me what’s wrong
It’s anonymous and confidential
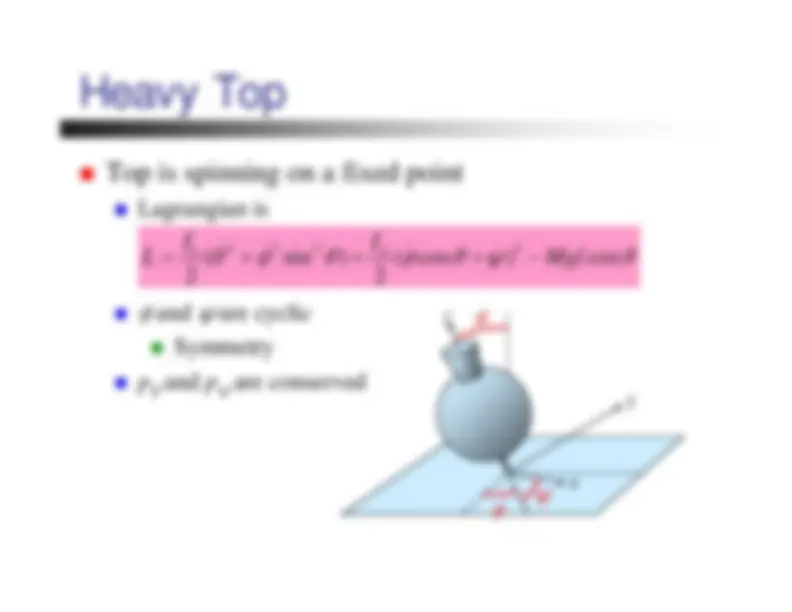
Heavy Top
Lagrangian is
and
are cyclic
Symmetry
p
φ
and
p
ψ
2 are conserved^
2
2
2
3
1
sin
cos
cos
Mgl
z
y
x
φ
ψ
θ
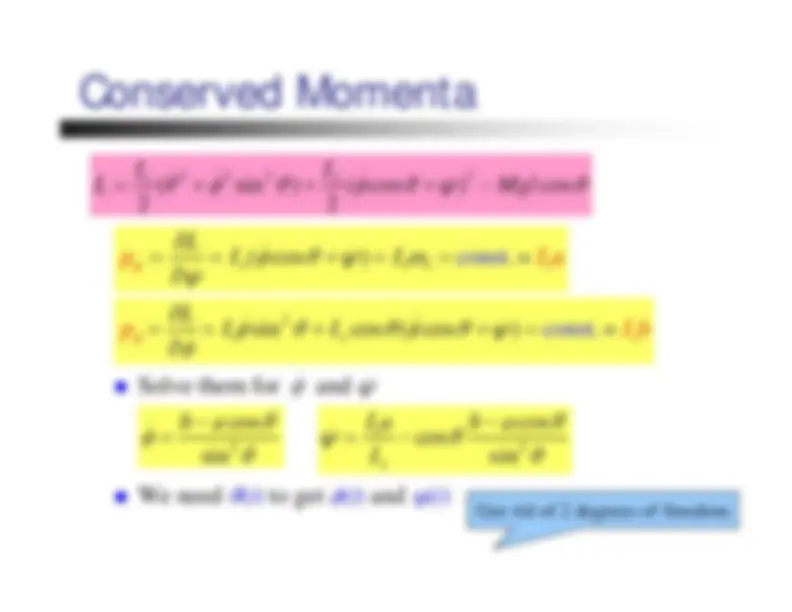
Conserved Momenta
Solve them for
and
We need
t ) to get
t ) and
t
2
2
2
2
3
1
sin
cos
cos
Mgl
2
1
3
1
sin
cos
cos
const.
p
I b
φ
3
3
3
1
co
con
s
st.
p
I a
ψ
cos^2
sin
b
a
1
2
3
cos
cos
sin
I a
b
a
Got rid of 2 degrees of freedom
1-D Equation of Motion
Switch variable from
to
u
= cos
Integrate
2
3
3
1
1
and
Mgl
2
2
cos
cos
sin
b
a
2
2
2
u
u
u
b
au
( )
2
2
(0)
u t u
du
t
u
u
b
au
∫
Ellipticintegral
EoM becomesEoM
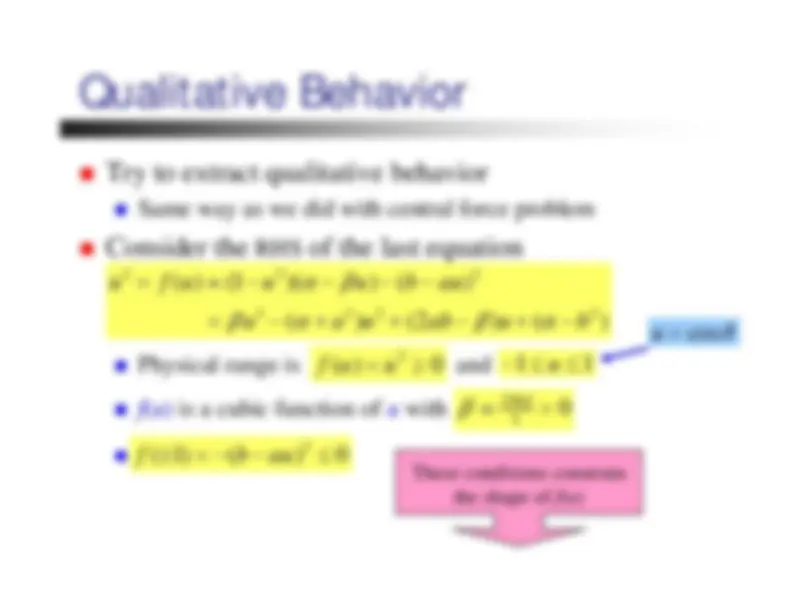
Qualitative Behavior
Same way as we did with central force problem
Physical range is
and
f (
u
) is a cubic function of
u
with
2
2
2
3
2
2
2
u
f u
u
u
b
au
u
a
u
ab
u
b
α
β
β
α
β
α
2
f u
u
1 2
MglI
β ≡
2
f
b
au
These conditions constrain
the shape of
f
( u
)
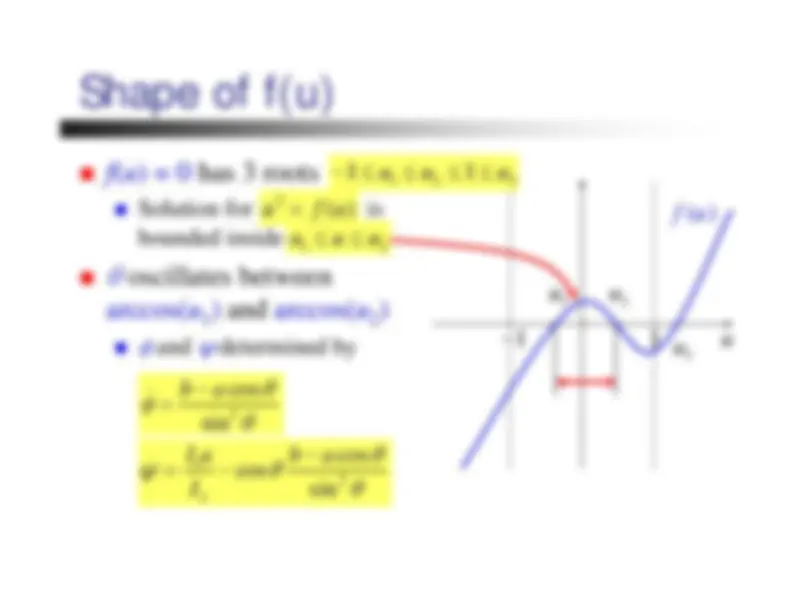
cos
u
Nutation
changes sign at
2
2
cos
sin
b
a
b
au u
u
u
b
a
1
2
or
u
u
u
u
1
2
u
u
u
is monotonous
switches direction
locus
Initial Condition
Spin the top, then release it “quietly”
0
t
=
0
t
f u
=
0
1
2
or
t u
u
u
=
0
t
=
0
t
b
au
=
0 t u
u
=
t^
= 0
Initially, the figure axis falls
It then picks up precession in
How does it know which way to go?
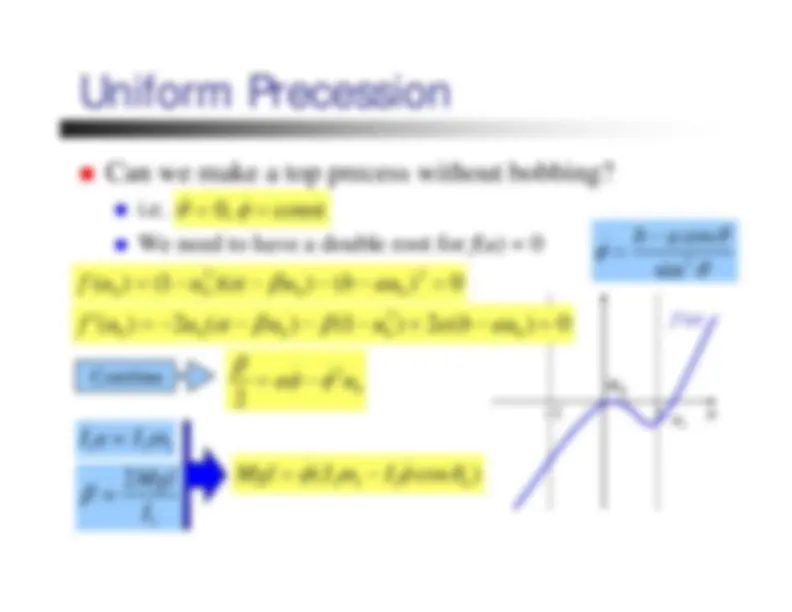
Uniform Precession
i.e.
We need to have a double root for
f
u
const
( ) f u
u
1
1 −
0 u
3 u
2
2
0
0
0
0
f u
u
u
b
au
2
0
0
0
0
0
f
u
u
u
u
a b
au
Combine
2
0
a
u
1
3
3
I a
1
Mg
l
I
3
3
1
0
cos
Mgl
cos^2
sin
b
a
Uniform Precession
For any given value of
3
and cos
0
, you must give exactly
the right “push” in
to achieve uniform precession
Quadratic equation
2 solutions
Same top can do “fast” or “slow” precession
For the solutions to exist
Uniform precession is achieved only by a fast top
3
3
1
0
cos
Mgl
2
2
3
3
1
0
cos
MglI
3
1
0
3 2
cos
MglI
Magnetic Dipole Moment
Using
Explicit calculation using polar coordinates
Take time average
Assume rotation is fast
i^
i^
i^
i^
i^
i
q
q
m
m
m
m
r
v
ω
r
r
i^
i
v
ω
× r
ω
i r
2
sin
sin
cos
(sin
cos
sin
cos
cos
i^
i^
r Bi
ω
r
r
(
)
2
sin
i^
i
q
q
m
r
m
m
ω
Magnetic Dipole Moment
Magnetic dipole
in
feels the torque
This makes
to precess around
Angular velocity of precession is
d dt
precess
q m
ω
q m
q m
gyromagnetic ratio
Larmor frequency
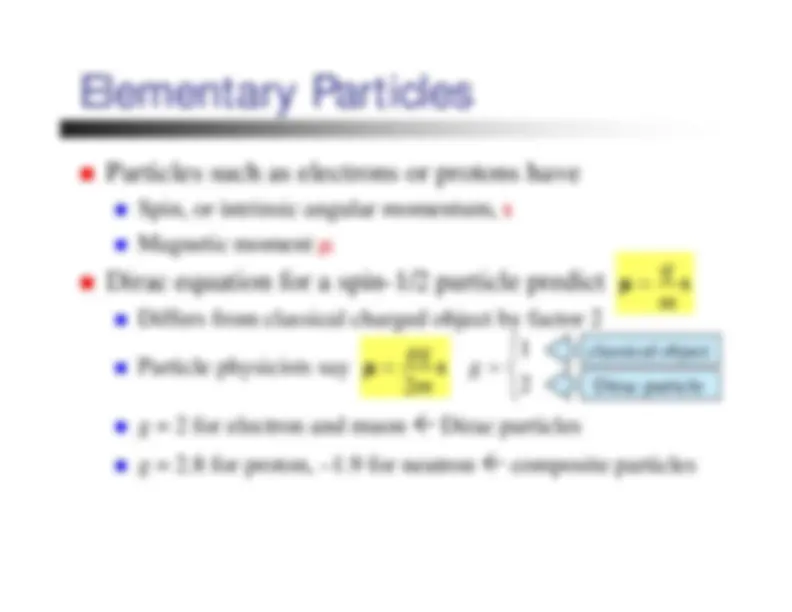
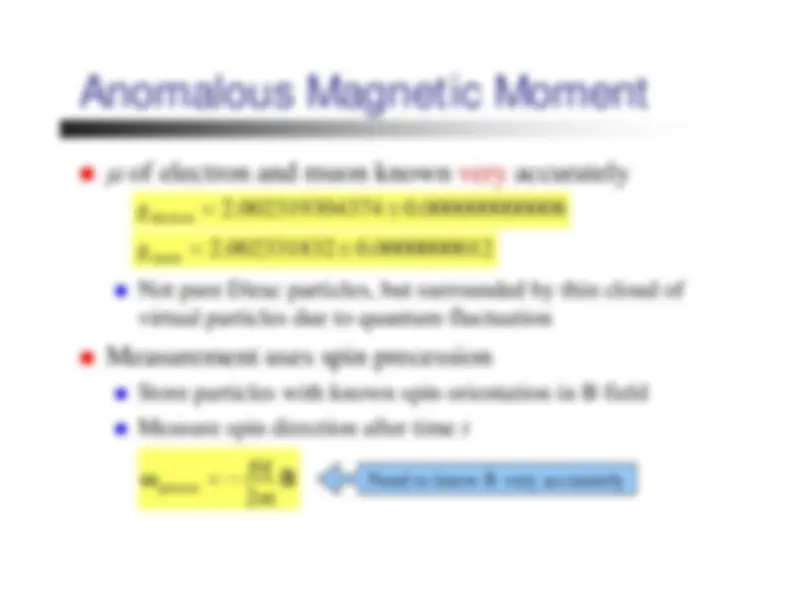
Anomalous Magnetic Moment
μ
Not pure Dirac particles, but surrounded by thin cloud ofvirtual particles due to quantum fluctuation
Store particles with known spin orientation in B field
Measure spin direction after time
t
precess
g 2
q m
ω
Need to know B very accurately
electron
g
muon
g
Muon g–2 Experiment
BNL E-821 muon storage ring
muon
g