



>>>
>>> Microcontroller Interfacing and Real-Time Applications
Name: Neil Robert Membreve, M.Eng.
Date:
Department of Electrical Engineering
[~]
$
[1/42]

















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This course covers the interfacing of microcontrollers with external devices and real-time systems, focusing on sensors, actuators, displays, and communication modules. Students learn how to design responsive embedded systems using interrupts, timers, and real-time control techniques.
Typology: Lecture notes
1 / 42

This page cannot be seen from the preview
Don't miss anything!
Name: Neil Robert Membreve, M.Eng. Date:
Department of Electrical Engineering
[~]$ [1/42]
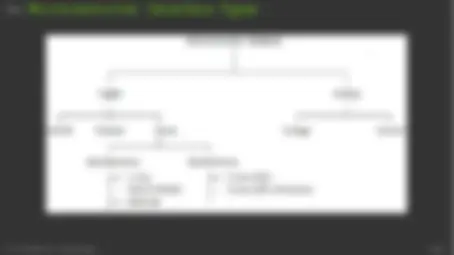
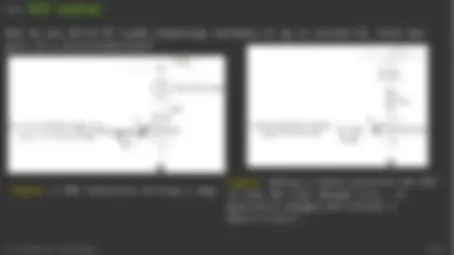
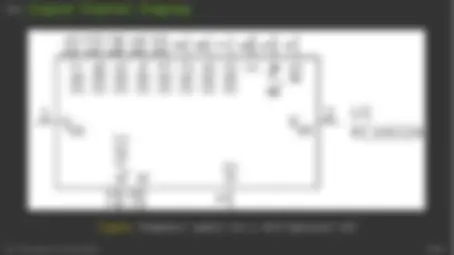
Figure: Micro-controllers are used to communicate with other devices, such as sensors, motors, switches, keypads, displays, memory, and even other microcontrollers. In a very simplistic form, a microcontroller system can be viewed as a system that reads from (monitors) inputs, performs processing, and writes to ( controls ) outputs.
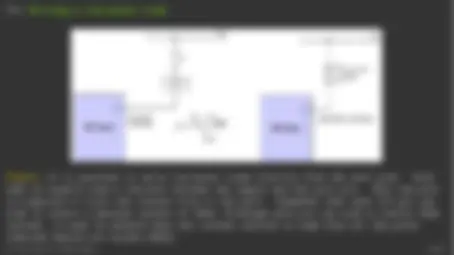
>>> Driving a low-power load
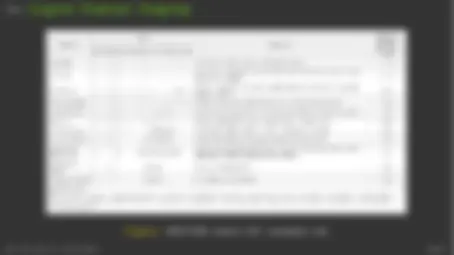
Figure: It is possible to drive low-power loads directly from the port pins. Note that we usually need a resistor between the supply and the port pin. This resistor is required to limit the current flow to the port. Remember that each I/O pin can sink or source a maximum current of 40mA. Although each pin can sink or source 40mA current, it must be ensured that the current sourced or sunk from all the ports combined should not exceed 200mA.
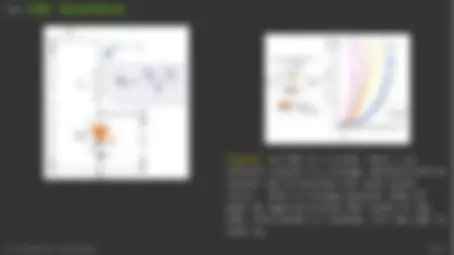
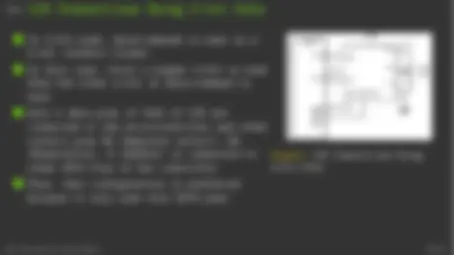
Figure: An LED is a diode; thus, its forward current to voltage characteristics curves can be plotted for each diode color. Note a voltage greater than Vf must be applied across the leads of the LED, from anode to cathode, for the LED to turn on.
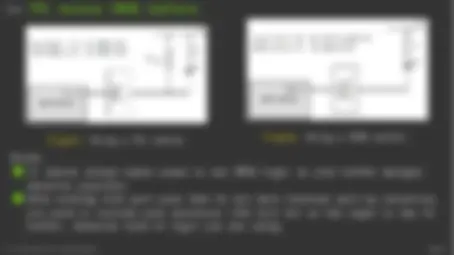
■ Buffers can be needed if we need to drive multiple low-power loads from one microcontroller ■ With (5V) TTL buffer, the Logic 0 output is in the range 0 to 1.5V; the Logic 1 output is 3.5 to 5V ■ With (5V) CMOS, the Logic 0 output is 0V; the Logic 1 output is 5V
Figure: Functional diagram of the 7404, 74LS04, 74HC04, 74HCU04, or 4069UB Hex inverter ICs.
Figure: Using a TTL buffer Figure: Using a CMOS buffer. Notes: ■ It almost always makes sense to use CMOS logic in your buffer designs wherever possible. ■ When working with port pins that do not have internal pull-up resistors, you need to include such resistors (10K will do) at the input to the IC buffer, whatever kind of logic you are using.
How do you drive DC loads requiring currents of up to around 2A, from the port of a microcontroller?
Figure: A PNP transistor driving a lamp.
Figure: Adding a buffer protects the MCU in case the load changes (e.g., is physically damaged and creates a short-circuit)
■ An inductive load is anything containing a coil of wire: common examples are electromechanical relays and motors. ■ When the current is removed (i.e., the load is turned off), the voltage across the inductor will increase rapidly as shown in Equation 1. This voltage spike might destroy the circuit connected to the load.
dI dt
where:
■ V is the voltage across the inductor ■ L is the inductance ■ dI/dt is the rate of change of current flow
■ Infra-red (IR) LEDs are widely used remote control. They are also a component in many security systems. ■ IR LEDs often have higher current requirements than conventional LEDs, but are otherwise connected in the same way. ■ For example, the Siemens SFH485 IR LED requires a current of 100 mA, at a forward voltage of 1.5V. ■ If we use a 2N2905 transistor|which can handle a maximum load current of 600 mA|ILED = 100mA, a supply voltage of 5V and an LED forward voltage of 1.5V, the required value of R2 is:
■ The saturation voltage, VCE = 0.4V is from the transistor data sheet.
Figure: Infrared 5mm T1-3/4 LED Emitter Osram SFH 485 SFH
Figure: Driving an IR LED via a transistor (PNP) driver
How do you control a DC load with high current requirements (up to around 100A) using a microcontroller?
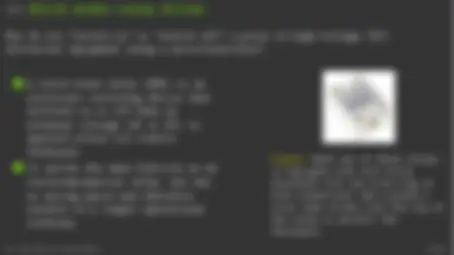
■ MOSFETs provide a flexible and cost-effective solution to many high-power applications, able to switch currents of up to 100A or more ■ Some MOSFETS can be driven directly from a processor port. However, in most cases it is necessary to drive the device with a higher voltage (12V +) than is available from the port itself. ■ In addition,it is generally good policy to have an extra layer of protection between the ports and any high-power load.
Figure: A typical TO- power MOSFET
Figure: Note that a Logic 0 output is required to switch on the load. Also, note that, as we are using the 74Ö06 driver for level shifting, the pull-up resistor is required
How do you "switch on" or "switch off" a piece of high-voltage (DC) electrical equipment using a microcontroller?
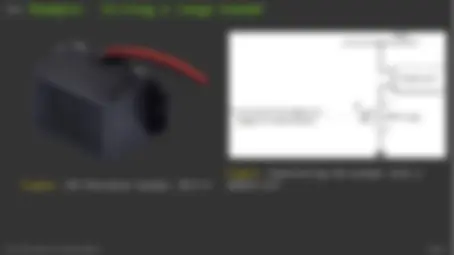
■ A solid state relay (SSR) is an electronic switching device that switches on or off when an external voltage (AC or DC) is applied across its control terminals ■ It serves the same function as an electromechanical relay, but has no moving parts and therefore results in a longer operational lifetime.
Figure: Each one of these relays is equipped with four screw terminals (for use with ring or fork connectors) and a plastic cover that slides over the top of the relay to protect the terminals.
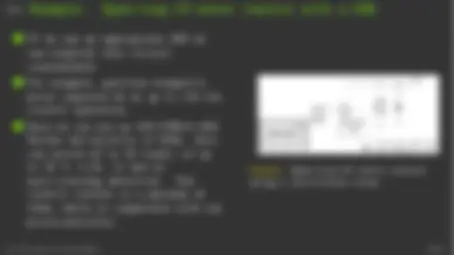
■ If we use an appropriate SSR we can simplify this circuit considerably ■ For example, previous example’s motor required 2A at up to 12V for correct operation. ■ Here we can use an IOR PVNO12 SSR. Unlike the majority of SSRs, this can switch AC or DC loads, of up to 20 V, 4.5A. It has no zero-crossing detection. The control current is a maximum of 10mA, which is compatible with our microcontroller.
Figure: Open-loop DC motor control using a solid-state relay