


.
12
Modeling for Structural
Vibrations
12–1


























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Material Type: Notes; Class: Dynamics of Aerospace Structures; Subject: Aerospace Engineering; University: University of Colorado - Boulder; Term: Unknown 1989;
Typology: Study notes
1 / 36

This page cannot be seen from the preview
Don't miss anything!
.
Chapter 12: MODELING FOR STRUCTURAL
VIBRATIONS
In modeling of cable vibration problems by linear elements, it was observed that one needs to modelthe cable by more than 50 elements if the fundamental frequency is to be computed within 4 digitaccuracy. What was not discussed therein is the accuracy of mode shapes. To gain further insight intofinite element modeling of vibration problems, let us consider the modeling of plane beam vibrationproblems. For simplicity, a beam with simple-simple supports is used to model 5th modes. Classicaltheory tells us that we have the following solution:
k-th mode:
ω
k
k
π
ρ
k-th mode shape:
x
sin
k
π
x
where
is the bending rigidity,
ρ
is the mass per unit beam length, and
is the beam span.
Chapter 12: MODELING FOR STRUCTURAL
VIBRATIONS
5
10
15
20
25
30
35
40
45
50
10
10
10
10
0
10
1
Number of Beam Element
s
Frequency Error (%)
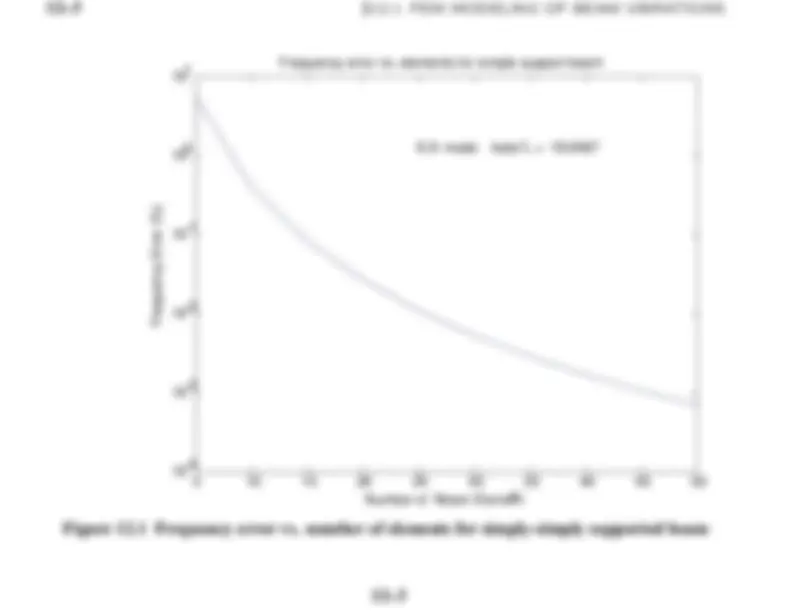
Frequency error vs. elements for fixed-simple support beam
6-th mode
beta*L = 19.
Figure 12.2 Frequency error vs. number of elements for fixed-simply supported beam
FEM MODELING OF BEAM VIBRATIONS
In using the finite element method for modeling of beam vibrations, the question arises: how manyelements does one need for an accurate computation of its k-th mode and mode shape. While thereexists a vast amount of literature on the accuracy and convergence properties of various elementswhich one may employ to answer the question, we will adopt a posteriori assessment approach.To this end, let us take a simply supported beam and concentrate on its 6th modes. The frequencyerror vs.
the number of beam elements used are shown in Fig.
As can be seen, five-digit
accuracy is achieved with about 45 elements.
If all one needs is the frequency with one percent
accuracy, one could use only 10 elements.In Figure 12.2 the frequency error of a fixed-simply supported beam is illustrated. Although the errorfor this case is a little higher than that of the simply supported case, the frequency error convergeswith the same trend.Let’s now focus on the mode shape accuracy.
FEM MODELING OF BEAM VIBRATIONS
0
1
-1.
-0.
0
1
Beam span
Mode shape
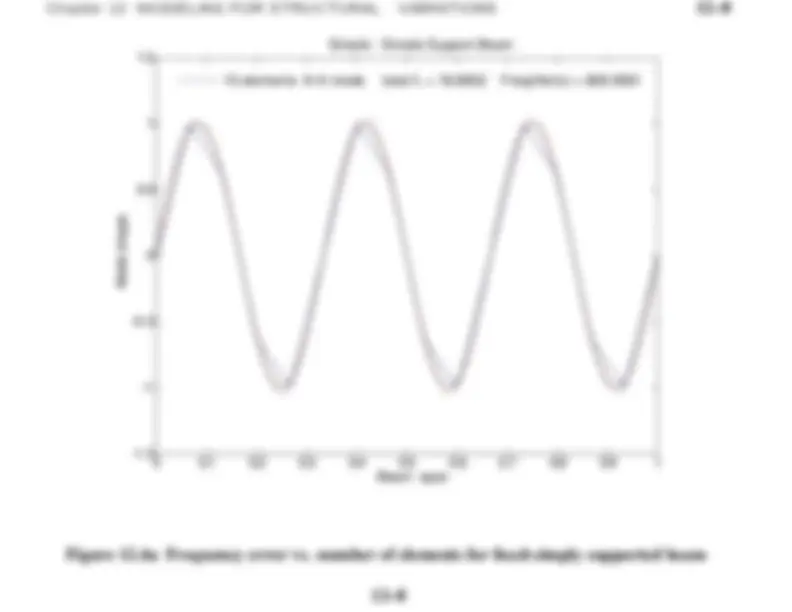
Simple - Simple Support Beam
10 elements 6-th mode
beta*L = 18.
Freq(Hertz) = 831.
Figure 12.3b Frequency error vs. number of elements for fixed-simply supported beam
Chapter 12: MODELING FOR STRUCTURAL
VIBRATIONS
0
1
-1.
-0.
0
1
Beam span
Mode shape
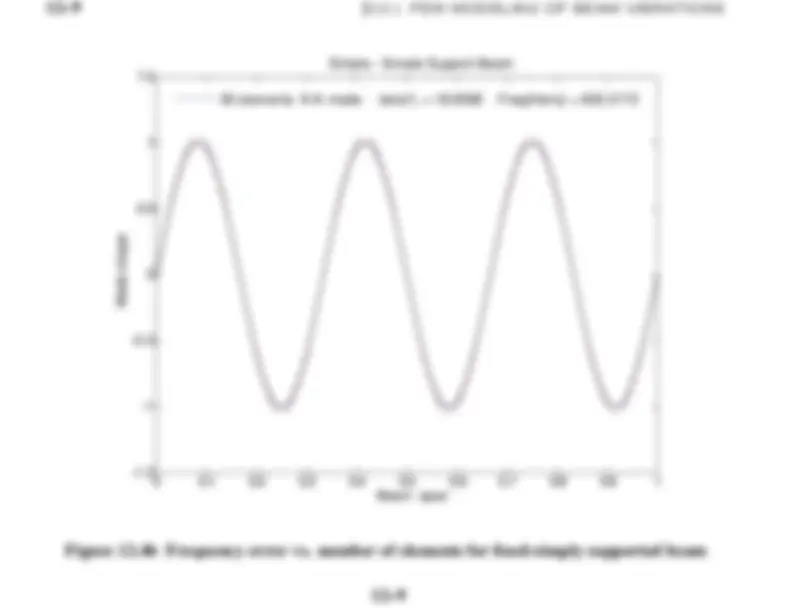
Simple - Simple Support Beam
15 elements 6-th mode
beta*L = 18.
Freq(Hertz) = 826.
Figure 12.4a Frequency error vs. number of elements for fixed-simply supported beam
Chapter 12: MODELING FOR STRUCTURAL
VIBRATIONS
0
1
-1.
-0.
0
1
Beam span
Mode shape
Simple - Simple Support Beam
40 elements 6-th mode
beta*L = 18.
Freq(Hertz) = 825.
Figure 12.5a Frequency error vs. number of elements for fixed-simply supported beam
FEM MODELING OF BEAM VIBRATIONS
0
1
-1.
-0.
0
1
Beam span
Mode shape
Simple - Simple Support Beam
50 elements 6-th mode
beta*L = 18.
Freq(Hertz) = 825.
Figure 12.5b Frequency error vs. number of elements for fixed-simply supported beam
CHARACTERIZATION OF STRUCTURAL DYNAMICS EQUATIONS
The coupled equations of motion for a linear structure(12.2) can be decoupled by the
n
n
eigenvector matrix
, which relates the displacement vector
u
to a generalized solution vector
q
via
u
Tq
Substituting (12.3) into (12.2) and premultiplying the resulting equations by
T
one obtains
q
(α
β3)
q
q
f
q
f
q
T
f
f
in which
T
T
diag
(ω
2 1
, ..., ω
2
N
where
ω
j
is the
j
-th undamped natural frequency component of (12.4).
The solution of (12.4) for its homegeneous part can be expressed as
q
c
e
s
t
where
s
is in general complex constants. Substitution of (12.7) into (12.4) with
f
q
0 yields
s
2
(α
β3)
s
c
Equation (12.8) has a nontrivial solution only if
det
s
2
(α
β3)
s
Chapter 12: MODELING FOR STRUCTURAL
VIBRATIONS
from which the
k
-th solution component can be expressed as
q
k
a
k
e
s
k
t
a
k
e
¯ s
k
t
where
s
k
and
s
k
are the k-th complex conjugate pairs of (12.9) and
a
k
and
a
k
are arbitrary constants.
Two characterizations of (12.9) are possible: frequency characterization,
viz.
, by fixing the damping
parameters
α
and
β
and varying the undamped natural frequency
ω
; and, damping characterization,
viz.
, by fixing the undamped natural frequency
ω
and varying the damping parameters
α
and
β
Figure 12.6 illustrates the root (
sh
) of the characteristics equation(12.9) when the nondimensional
frequency (
ω
h
) is varied, where
h
has the dimension of time.
In the case of step-by-step time
integration of the governing equations of motion (12.2),
h
may represent the integration time step
size. We will examine different parameter choices to understand the root loci drawn in Fig. 12.6.
Chapter 12: MODELING FOR STRUCTURAL
VIBRATIONS
12.2.1 Frequency Characterization Based on the Root Locus Method
The characteristic equation (12.9) represents
n
roots:
s
2 j
(α
βω
2 j
s
j
ω
2
j
j
n
Since not only the distribution but also the maximum and minimum frequencies are not knowna-priori, a complete range of the Rayleigh-damped system can be characterized by the followingexpression:
s
2
(α
βω
2
s
ω
2
ω
In order for the subsequent characterization to remain valid for all time sampling rates (or integrationstepsize), we normalize (12.12) by the time stepsize
h
such that
s
2
(α
h
β
h
(ω
h
2
s
(ω
h
2
ω
h
s
2
α
β
ω
2
s
ω
2
α
α
h
β
β h
ω
ω
h
Note, first, that the rigid-body motion (i.e.,
ω
ω
h
s
1
and
¯ s
2
α
h
α,
These two roots are marked as
s
1
and
s
2
in Fig. 12.6.
CHARACTERIZATION OF STRUCTURAL DYNAMICS EQUATIONS
As the undamped natural frequency
ω
h
is increased, the root loci move from the initial points (
s
1
s
2
meeet at the branch point at
as double roots:
s
A
h
αβ)/β,
α
β)/
β,
As
ω
h
is further increased, the root loci split into two conjugate paths forming a half circle whose
center is located at
β,
with its radius of
α
β/
β
. For example, at points B indicated in
Fig. 12.6, we have:
s
B
β,
α
β/
β
As
ω
h
is further increased, the two complex roots merge at
s
C
h
αβ)
β
For
ω
h
s
C
, one locus branches out toward the negative infinite axis while the other approaches
the origin
. This is also illustrated in Fig. 12.6.
For the special case
β
viz.
, mass proportional damping, the branch occurs at
s
α
h
2
when
ω
α/
ω
h
α
h
2
exhibit over-critically damped
responses as the locus becomes a straight line
¯ s
α
h
2
. In particular, if
α
0, the root loci
coincide with the imaginary axis, whose response is characterized by purely oscillatory components.
VARIOUS DAMPING MODELS
Now, we like to examine for a fixed
ω
what happens when
ξ
is varied. For the undamped case, viz.,
ξ
eq
0, the roots lie on the imaginary axis,
¯ s
ω
. As
ξ
is increased, the roots rotate toward
the left-hand complex plane with the constant magnitude of
ω
ω
h
since
s
ω
h
and the shift angle being
θ
tan
−
1
ξ
2
/ξ
. The two complex roots merge on the real axis when
ξ
1, thus the root locus is a half-circle with radius
ω
h
For
ξ >
1, one root branches out to
the infinite negative axis while the other approaches the origin (see Figure 12.6). This invarianceproperty, that is, the magnitude of the complex roots remains the same for all damping ratios, playsan important role both for active controller synthesis and computational algorithms.§
Modeling of damping remains a challenge in structural dynamics. Over the years various dampingmodels have been proposed. Below lists a sample of parameterized damping models.§
12.3.1 Mass-Proportional Damping Model
If the damping can be made proportional to the mass such as dynamic friction cases, the dampingmatrix can be parameterized according to
α
as already discussed in the previous section. The root loci are a special case of (12.2) governed by
Chapter 12: MODELING FOR STRUCTURAL
VIBRATIONS
s
2
α
s
ω
2
which is plotted in Fig. 12.7 as
model A
with its parameter
α
straight vertical line when (
ω > α/
12.3.2 Viscous Damping Model
One of the most widely used damping models is the viscous damping characterization. This has beenadopted for modeling of coated damping layers, of lubricants in rotating machines, and of a plethoraof unknown sources. Mathematically, the viscous damping model can be expressed as
ξ
ω
p
T
ξ
ω
p
diag
(ξ
1
ω
p
1
, ξ
2
ω
p 2
, ..., ξ
N
ω
p N
T
T
Therefore, the characteristic equation of a viscous damped system is given by
s
2 j
ξ
j
ω
p j
s
j
ω
2 j
Note that the two cases
p
, ξ
1
ξ
2
ξ
N
α
and
p
, ξ
1
ξ
2
ξ
N
β
have been studied in the preceding section.The root loci of a viscous damped case, when combined with a mass-proportional damping, areobtained by
p
, ξ
1
ξ
2
ξ
N
ξ
s
2
α
ξ
ω)
s
ω
2