


Module 2
Lesson 5
Numerical Differentiation
Backward Difference Method
Edgar M. Adina
Instructor
CE50P-2
Numerical Solutions to Engineering Problems





Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This document introduces the concept of numerical differentiation using the backward difference method. It explains how calculus is an essential tool for engineers and how differentiation and integration are the mathematical concepts at the heart of calculus. The document then goes on to explain the finite difference and how it becomes a derivative as Δx approaches zero. It also explains the backward difference approximation of the first derivative and provides an example to illustrate the concept. Finally, it introduces the backward difference formulas for the first derivative and provides the second-order estimate of f’(x).
Typology: Lecture notes
1 / 13

This page cannot be seen from the preview
Don't miss anything!
=Δ𝑥 lim 0
𝑎
𝑏
➢ Differentiation has so many engineering applications
(heat transfer, fluid dynamics, chemical reaction kinetics,
etc…)
➢ Integration is equally used in engineering (compute work
in ME, nonuniform force in SE, cross-sectional area of a
river, etc…)
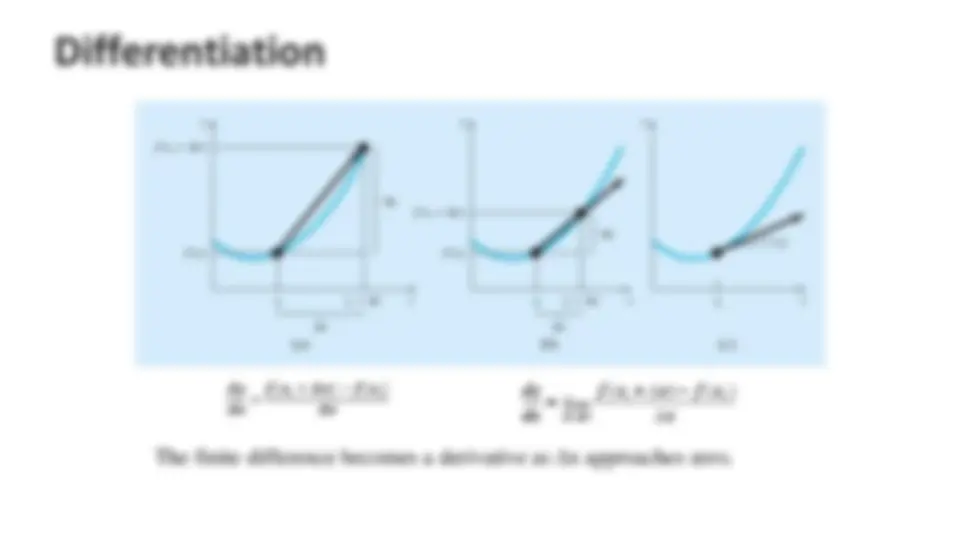
𝜟𝒚
𝜟𝒙
=
𝒇(𝒙𝒊 + 𝜟𝒙) − 𝒇(𝒙𝒊)
𝜟𝒙 x
f x x f x
dx
dy (^) i i
x (^)
( ) ( ) lim 0
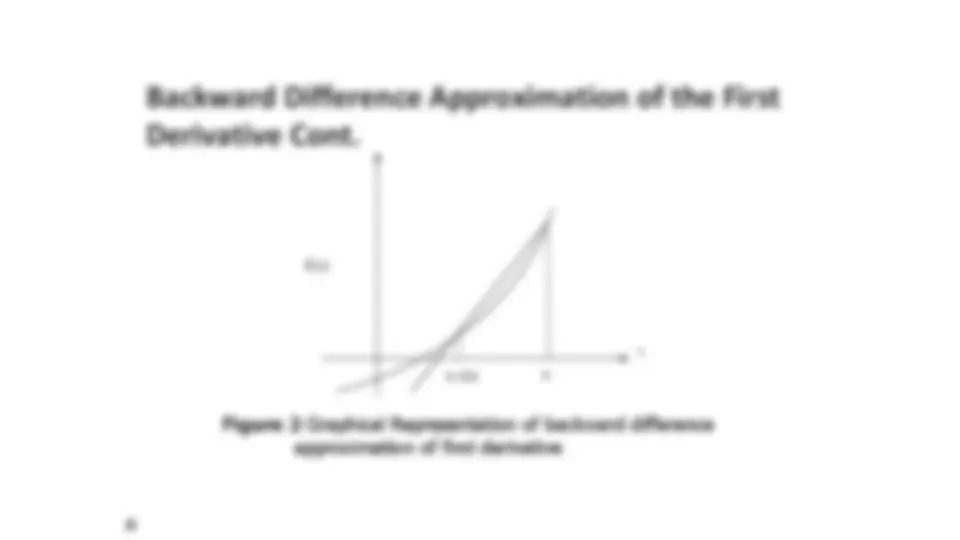
Backward Difference Approximation of the
First Derivative Cont.
backward from x. To find the value of (^) f ( ) x at i x = x , we may choose another
point (^) ' Δ x '
( )
( ) ( )
x
f x f x f x
i i i
− (^)
− 1
( ) ( )
1
1
−
−
i i
i i
1 Δ − = − i i x x x
x-Δx^ x
x
f(x)
Backward Difference Approximation of the First
Derivative Cont.
( )
( ) ( )
i i
− (^1) = 16
14
16 2
1
=
= −
t (^) i − = ti − t
( )
( ) ( )
( ) ( )
16 2000 ln 4
4
= = 392. 07 m/s
( ) ( )
4
4
( )
( ) ( )
2
16 14 16
− a
2
( )
2
nd
i
i- 1
i- 2
i- 3
2 )