



Algorithms for Network
Optimization Problems
This handout:
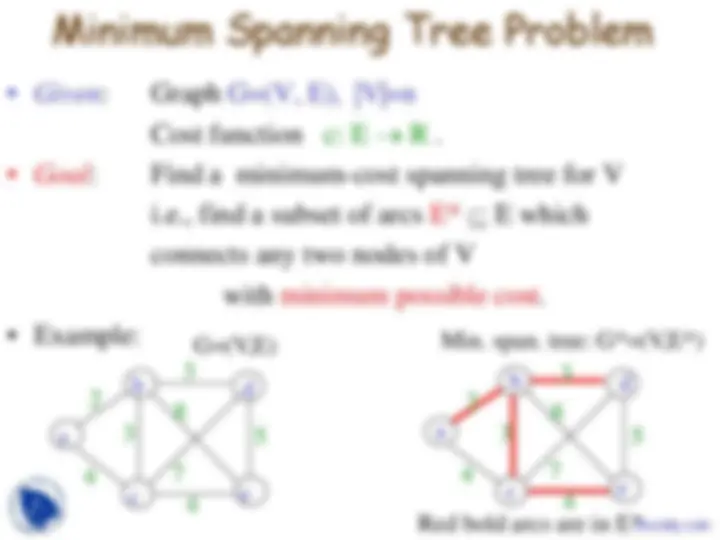
• Minimum Spanning Tree Problem
• Approximation Algorithms
• Traveling Salesman Problem
Docsity.com










Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The key points in these lecture slides, which are core of the discrete modeling and optimization are:Network Optimization Problems, Algorithms, Minimum Spanning Tree Problem, Traveling Salesman Problem, Terminology of Graphs, Pairs of Points, Sequence of Distinct Nodes, Cycles, Connectivity, Minimum Possible Cost
Typology: Slides
1 / 18

This page cannot be seen from the preview
Don't miss anything!
Example:
Example :
e
b
c
d
a
e
b
c
d
a
Min. span. tree: G=(V,E)
Red bold arcs are in E*Docsity.com
The algorithm applied to our example
Its closest node is node b. Connect nodes a and b.
connected node: nodes c and d
(both are 3 units far from node b).
Break the tie arbitrarily by
connecting node c to node b.
e
b
c
d
a
e
b
c
d
a
Red bold arcs are in E*;
thin arcs represent potential links.
The algorithm applied to our example
node is node d (3 far from node b). Connect nodes b and d.
closest connected node is node c
(distance between c and e is 4).
Connect node e to node c.
arcs give a min. spanning tree.
e
b
c
d
a
e
b
c
d
a
Three main directions to solve
NP-hard discrete optimization problems:
an approximation algorithm for TSP.
Definition of
Approximation Algorithms
polynomial-time algorithm which always produces a
solution of value within α times the value of an
optimal solution.
That is, for any instance of the problem
Z
algo
/ Z
opt
≤ α , ( for a minimization problem )
where Z
algo
is the cost of the algorithm output,
Z
opt
is the cost of an optimal solution.
of the algorithm.
(using the algorithm of the previous handout)
start from
this node
red bold arcs
form a tour
Docsity.com
uw
uv
vw
w
v
u
Approximation guarantee
for the algorithm (proof)
1
k
start from
this node
red bold arcs
form a tour
Approximation guarantee
for the algorithm (proof)
c(e) ≤ c(f
1
)+…+c(f
k
E.g, c
15
≤ c
13
35
c
23
≤ c
23
is shortcut exactly twice. ()**
E.g., tree arc 3-5 is shortcut by tour arcs 1-5 and 5-.
The following chain of inequalities concludes the proof,
by using the facts we obtained so far:
start from
this node
red bold arcs
form a tour
2 cost(MST) 2 cost(optimal TSP)
cost(our tour) c(e) 2 c(e)
by(*)
thinarcse
byΔineq.,(**)
boldarcs e
= ⋅ ≤ ⋅
= ≤ ⋅
∑ ∑