



1/22
Note Set #2
• What are Continuous-Time Signals???
• Reading Assignment: Section 1.1 of Kamen and Heck
EECE 301
Signals & Systems
Prof. Mark Fowler










Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This note set introduces the concept of continuous-time signals, focusing on unit step functions and their relationship with unit ramp functions. the definition of continuous-time signals, the unit step function, and the relationship between the two. It also explains how the unit ramp function can be derived from the unit step function through integration.
Typology: Assignments
1 / 22

This page cannot be seen from the preview
Don't miss anything!
EECE 301
Signals & Systems
Prof. Mark Fowler
Ch. 1 Intro C-T Signal Model Functions on Real Line System Properties D-T Signal Model Functions on Integers
LTICausalEtc
Ch. 2 Diff EqsC-T System Model Differential Equations^ D-T Signal Model Difference Equations Zero-State Response Zero-Input Response^ Characteristic Eq.
Ch. 2 ConvolutionC-T System Model^ Convolution Integral^ D-T System Model^ Convolution Sum
Ch. 3: CT
Fourier Signal
Models Fourier Series Periodic Signals Fourier Transform (CTFT)^ Non-Periodic Signals
New
System
Model
New Signal^ Models
Ch. 5: CT
Fourier System
Models Frequency Response Based on Fourier Transform New
System
Model
Ch. 4: DT
Fourier Signal
ModelsDTFT (for “Hand” Analysis)^ DFT & FFT (for Computer Analysis)
New Signal^ Model^ PowerfulAnalysis Tool
Ch. 6 & 8: LaplaceModels for CT^ Signals
&^ Systems Transfer Function New^ System
Model Ch. 7: Z Trans.Models for DT Signals
&^ Systems Transfer Function
New
System Model
Ch. 5: DT
Fourier System
Models Freq. Response for DT^ Based on DTFT New
System
Model
The arrows here show conceptual flow between ideas. Note the parallel structure between
the pink blocks (C-T Freq. Analysis) and the blue blocks (D-T Freq. Analysis).
u ( t ) 1
t
Note:
A step of height
A^ can be made from
Au
( t )
These are common textbook signals but are also common test signals, especially in control systems.
t^ = 0
Depends on
t^ value
⇒function of
t :^ f
( t )
- Write unit step as a function of
- Integrate up to
- How does area change as
t^ changes?
i.e., Find Area
Area =
f ( t )
“Running Integral of step = ramp” t ∫ ∞−
d u
t = ∫ ∞−
λ λ)(
)(
1 )( )(
tr t t d u tf
t
== ⋅=
∞−
λ λ ∫ ∞− =^
t
d u tr
λ λ)(
)(
we have:
u ( t ) 1
r ( t ) 1
t
⎧ ⎨ ⎩
< =^
0 , 0
0 , 1 )(
t^ t
tdr dt
⎧ ⎨ ⎩
≥ <
=^
0 , 0
0 ,
)(
t t t
tr
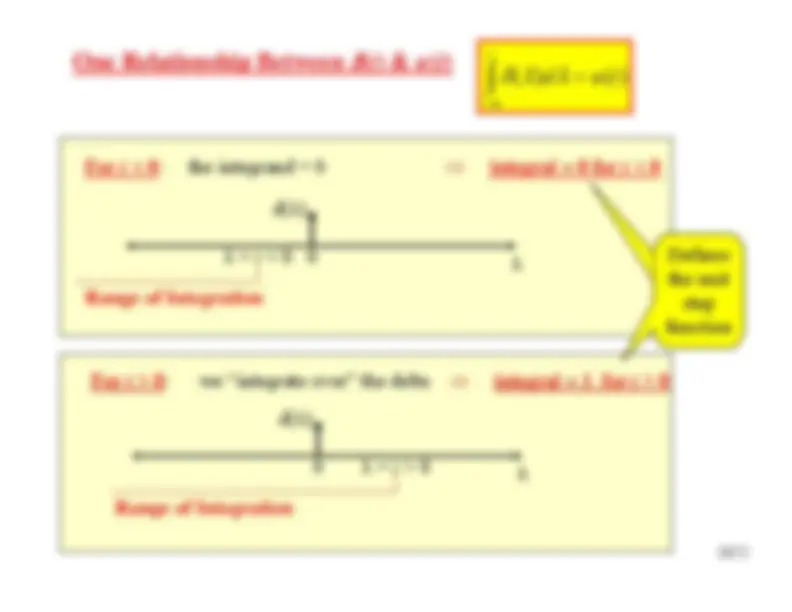
tdr dt
tu
)(
)( =
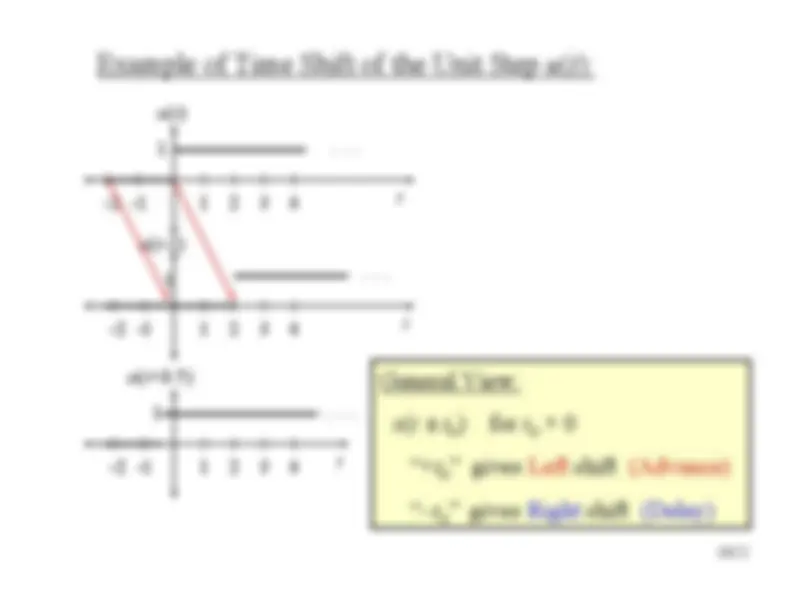
u ( t ) 1
t
u ( t -2)
t
u ( t +0.5)
t
Other Names: Delta Function,
Dirac Delta Function
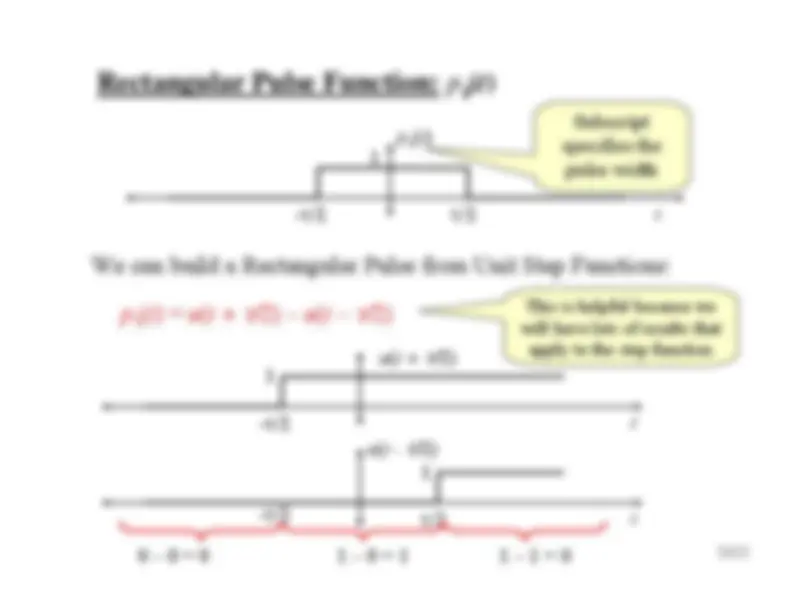
Infinite heightZero widthUnit
area
a pulse with:
δ( t
δ( t
0 any for , 1 )(
0 any for , 0 )(
=
≠
= ∫ −
dtt
t
t
t
δ( t
Caution
… this is NOT the vertical axis… it is the delta function!!!
δ ( t
0
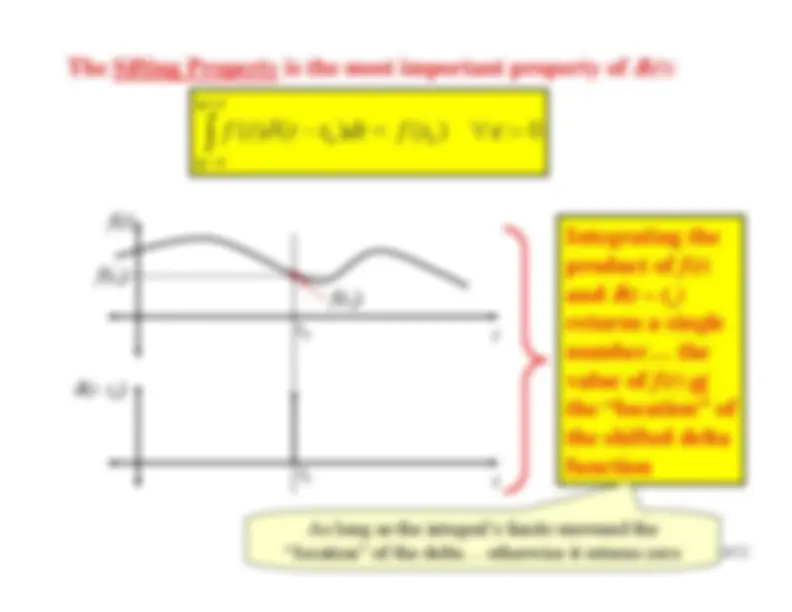
) ( ) ( )( 0 0
0
0
∀
= −
ε
δ ε t ε t
tf dt t t tf
t
f ( t )
t^0
f ( t )^0
t
t^0
f ( t )^0 )^0
δ ( t – t
As long as the integral’s limits surround the“location” of the delta… otherwise it returns zero
? ) (^5). 2 ()
2 sin( 0
=
−
∫^
dt
t t^ δπ
0 ) (^5). 2 ()
2 sin( 0
=
−
∫^
dt
t t^ δπ
Step 1
: Find variable of integration:
t
Step 2
: Find the argument of
t^ – 2.
Step 3
: Find the value of the variable of integration that causes the argument of
) to go to zero:
t^ = 2.
Step 4
: If value in Step 3 lies inside limits of integration… No! Otherwise… “return” zero…
t π
(^ − t δ
? ) 4 (^3) ( ) 3 )(
7 sin(^4
2
=
−
∫ −
dt t
tt
δ
ω
(^
)ω
δ
ω^
(^3) / 4 sin (^26). 6
) 4 (^3) ( ) 3 )(
7 sin(^4
2
−
=
−
∫ −
dt t
t t
Step 1
: Find variable of integration:
τ
Step 2
: Find the argument of
τ^ + 4
Step 3
: Find the value of the variable of integration that causes the argument of
) to go to zero:
τ^ = –
Step 4
: If value in Step 3 lies inside limits of integration… Yes! Take everything that is multiplying
): (1/3)sin(
ωτ/3)(
τ/3 – 3)
2
…and evaluate it at the value found in step 3:
(1/3)sin(–4/
ω)(–4/3 – 3)
2 = 6.26sin(–4/
ω) Because of this… handleslightly differently!
Step 0
: Change variables: let
τ^ = 3
t^ Î
d τ
dt^ Î
limits:
τL^
τL^
21 12
2
τ τδ
τ ωτ^
u ( t )^1
Derivative = 0
Derivative = 0 Derivative = “
∞ ” (“Engineer Thinking”)
δ ( t
t
x ( t )
... ...
When we say “Period” we almost always mean “Fundamental Period”
x ( t )
x ( t^