Download Non Linear Models-Computational Physics-Lecture Slides and more Slides Computational Physics in PDF only on Docsity!
Consider a model of two-dimensional dynamical system that obeys the following ordinary differential equations (ODEs):
f ( x , y )
dt
dy
g(x,y)
dt
dx
It is an autonomous system as it does not explicitly involve the independent variable t. If such a system involves a nonlinear term such as x^2 (t), x(t)y(t), sinx(t), exp(ay) etc., then the system is said to be nonlinear one. Recall the chain rule for differentials: (dy/dx)(dx/dt) is equal to dy/dt. It means that
g(x,y)
f(x,y)
dx / dt
dy / dt
dx
dy
Non-Linear Models
- When y(t) is given as a function of x or x is represented as a function of y , a trajectory of solution is formed for the model.
- The case when both x and y are constant means that both derivatives in Equation are zero.
- Such points are called stationary points , equilibrium points or fixed points of the system.
We use x as a angular displacement, v(t) as its time rate of change,
and a(t) as the second derivative of x(t).
Non-Linear Models
A closed curve is called a limit cycle in phase space
towards which an orbit evolves as time goes to large
values.
When all the neighboring trajectories are going
towards the limit cycle it is called a stable or
attracting cycle , otherwise it is an unstable or
repelli ng one.
Visualization in Phase Space
A simple Pendulum
A a mass m is attached to a rigid rod and the mass is at distance L from the frictionless pivot. The system moves in a plane. The motion of is governed by the equation for torque: - I a(t)
dt
2 2 x x
where, (t), is the torque around the pivot point;
I is the moment of inertia about the pivot point, and
a(t) is the angular acceleration.
We use x as a angular displacement; v (t) as its time rate of
change, and a(t) as the second derivative of x(t).
Then torque is mgLsinx with I = mL^2.
The model equation is then
2 2 sin^0 ;^2 /^1.^0
2 g L dt
d
Major features of the mathematical model:
( 0 ) 0 , '( 0 ) 0 '.
Here Dependent and independent variable are y and t;
Order: 2; Linearity: It is a nonlinear equation as it has no product terms. Homogeneity: It is homogeneous equation with no force term Conditions: Initial conditions are given. Coefficients: There are constant coefficients. Model Equation Type: It is a single ordinary differential eq. based model.
Example 1: Undamped System of Simple Pendulum
θ
m
L
Solution: STEP 1: Use Newton's Second Law to find the equation of motion, or model the abstract form of the system: a = F(t, x, v), STEP 2: Choose the initial conditions, x 0 & v 0 ; choose maximum time scale for simulation ( tmax ). STEP 3: Decide on the step size h. STEP 4: Begin a loop. Execute the loop while the time is less than tmax. STEP 5: Plot (t, x) or make a portrait by plotting (x, v). STEP 6: Calculate k 1 , k 2 , k 3 , and k 4 from the Runge-Kutta formulas, and use them to update x: x (^) i 1 xi x
STEP 7: Update v with the Runge-Kutta formulas: v^ i^ ^1 vi v STEP 8: Increment the time: t = t + h. STEP 9: End of STEP4 and then Stop.
Outline a simulation algorithm for the equation of a pendulum in an undamped system. The initial conditions are given for the position and velocity.
Algorithm for Motion of a Simple Pendulum
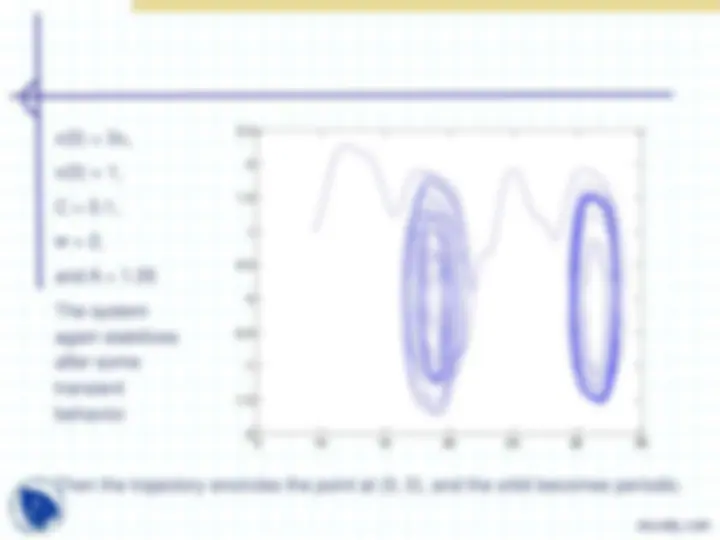
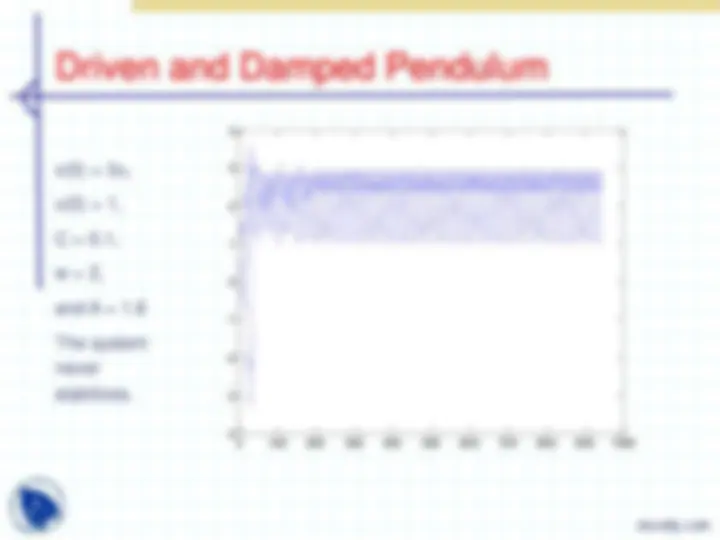
mass = 1 and L = 9.8, x(0) = 10 and v(0) = 0.
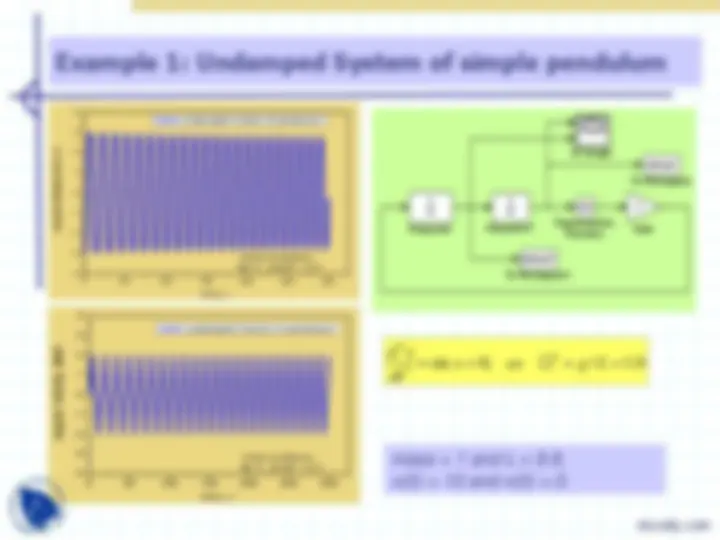
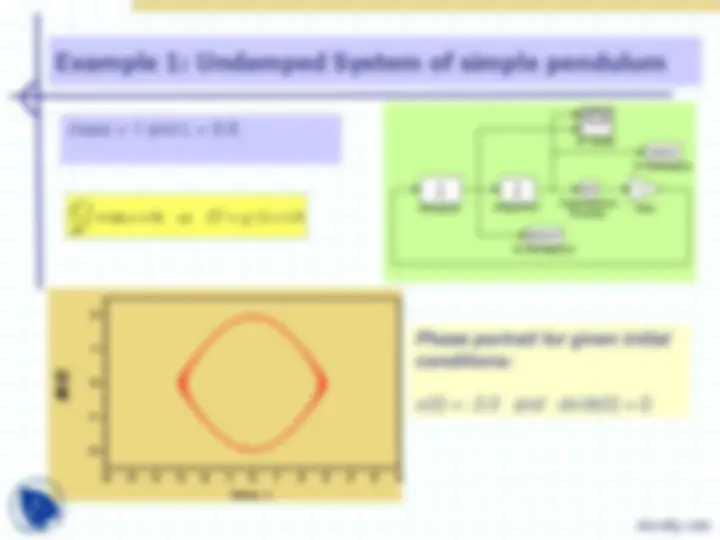
Example 1: Undamped System of simple pendulum
-4 0 50 100 150 200 250 300
0
1
2
3
4
angular displacement,
time, t
undamped motion of pendulum
initial conditions : and ' = 0.
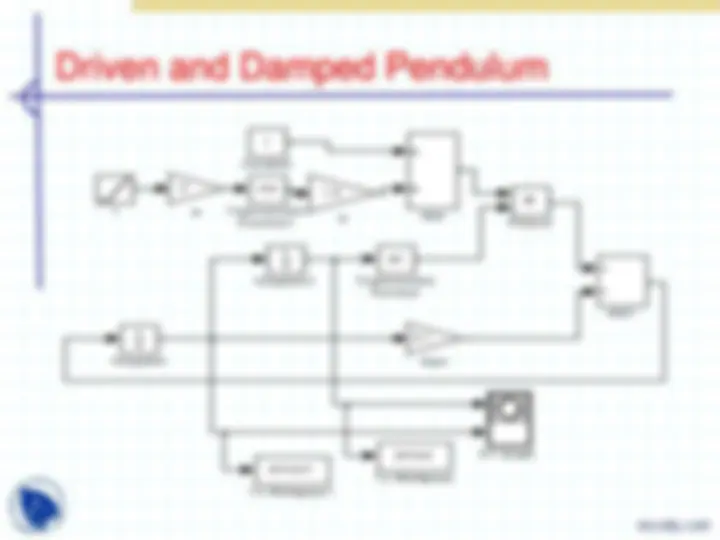
XY Graph
sin TrigonometricFunction simout To Workspace
simout To Workspace (^1) s Integrator
(^1) s Integrator
- Gain
-4 0 50 100 150 200 250 300
0
1
2
3
4
angular velocity, d
dt
time, t
undamped motion of pendulum
initial conditions : and ' = 0.
2 sin^0 ;^2 /^1.^0
2 ddtx x as g L
mass = 1 and L = 9.8,
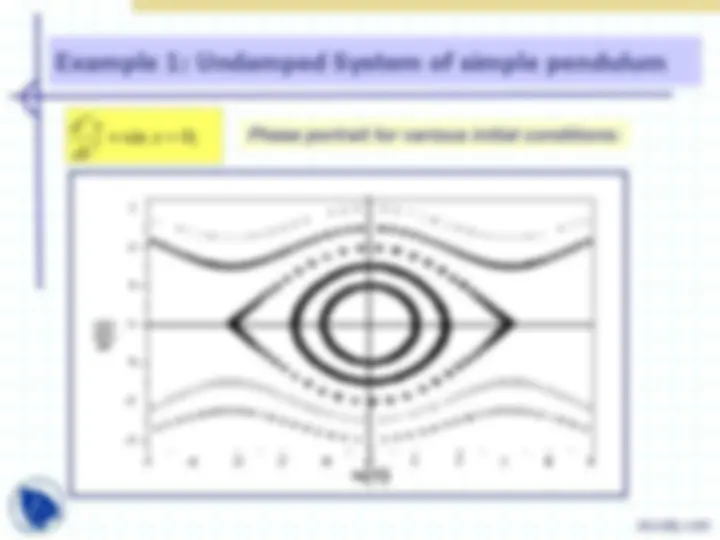
Example 1: Undamped System of simple pendulum
2 sin^0 ;^2 /^1.^0
2 ddtx x as g L
XY Graph
sin TrigonometricFunction simout To Workspace
simout To Workspace (^1) s Integrator
(^1) s Integrator
- Gain
-3-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6
0
1
2
3
d
/dt
time, t
Phase portrait for given initial conditions:
x(0) = -1.5 and dx/dt(0) = 0.
mass = 1 and L = 9.8,
Example 1: Undamped System of simple pendulum
XY Graph
sin TrigonometricFunction simout To Workspace
simout To Workspace (^1) s Integrator
(^1) s Integrator
- Gain
-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6
0
1
2
d
/dt
time, t
Phase portrait for given initial conditions:
x(0) = -3.0 and dx/dt(0) = 0.
2 sin^0 ;^2 /^1.^0
2 ddtx x as g L
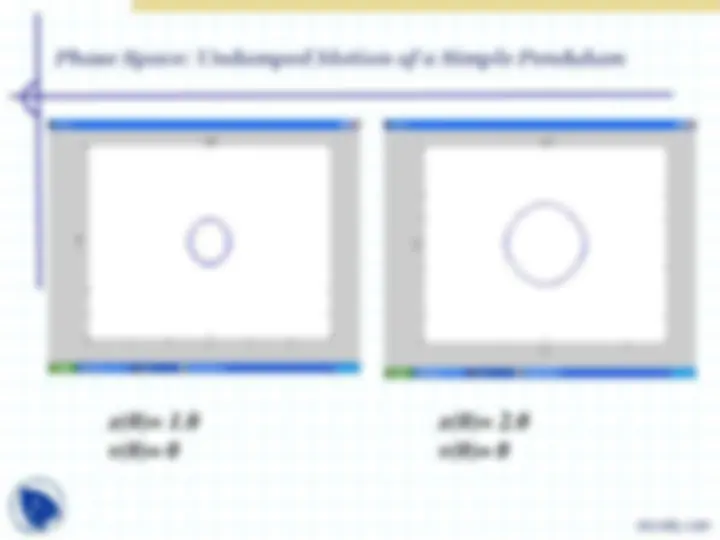
Phase Space: Undamped Motion of a Simple Pendulum
- x(0)= 1.
- v(0)=
- x(0)= 2. Phase Space: Undamped Motion of a Simple Pendulum
- v(0)=
- x(0)= Phase Space: Undamped Motion of a Simple Pendulum
- v(0)=
- x(0)= Phase Space: Undamped Motion of a Simple Pendulum
- v(0)= -
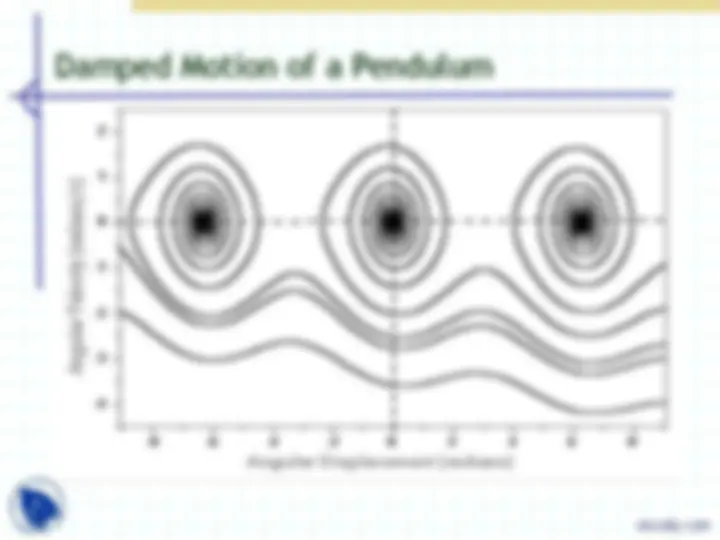
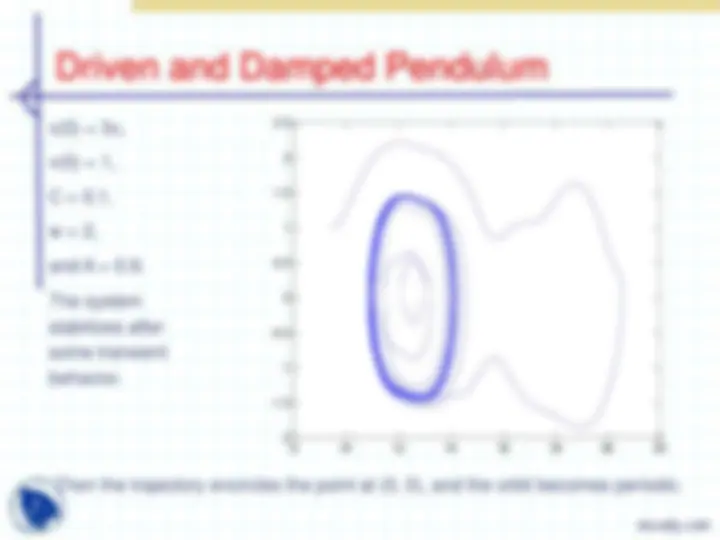
Let us allow velocity range to be from -4 to 4 in steps of 0.
and domain is given by [ -3p, 3p ].
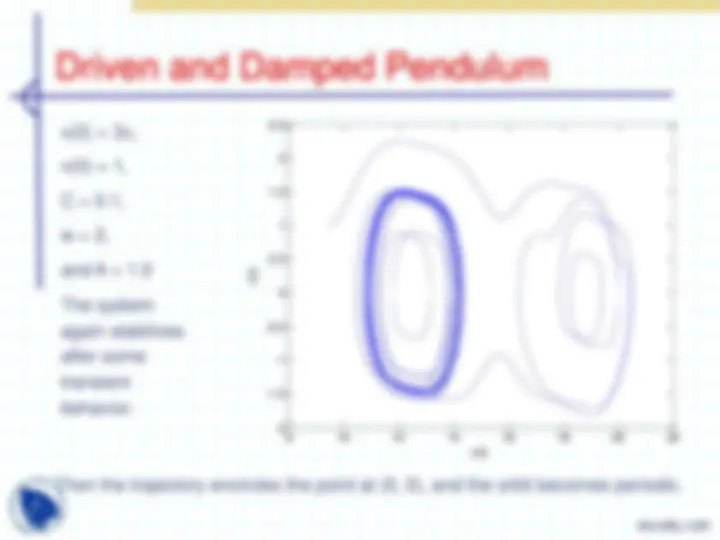
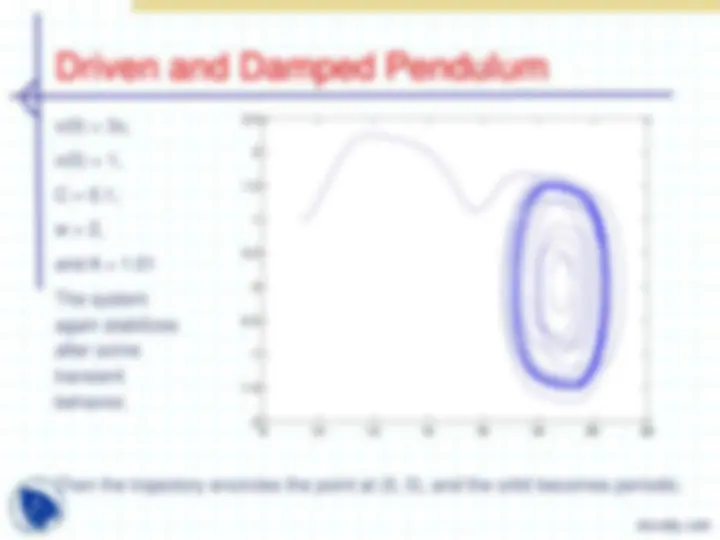
We can modify the initial conditions to get a set of
concentric ellipses centered on points (2nπ, 0).
The point in phase space (0, 0) phase space (0, 0) and the set
of points ( 2nπ, 0), where n is an integer are points of stable
equilibrium for the simple pendulum; the pendulum is
hanging down from the pivot.
The set of points [(2n - 1)π, 0] are points of unstable
equilibrium; the pendulum is " standing " on its pivot.
Phase Space: a Simple Pendulum
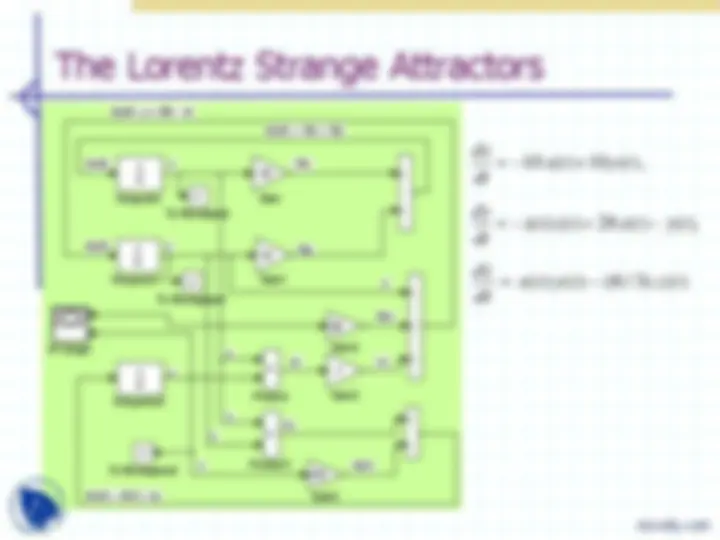
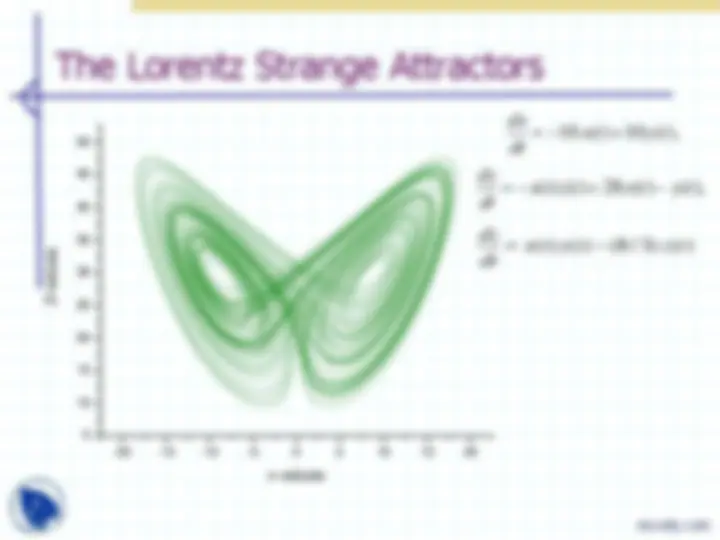
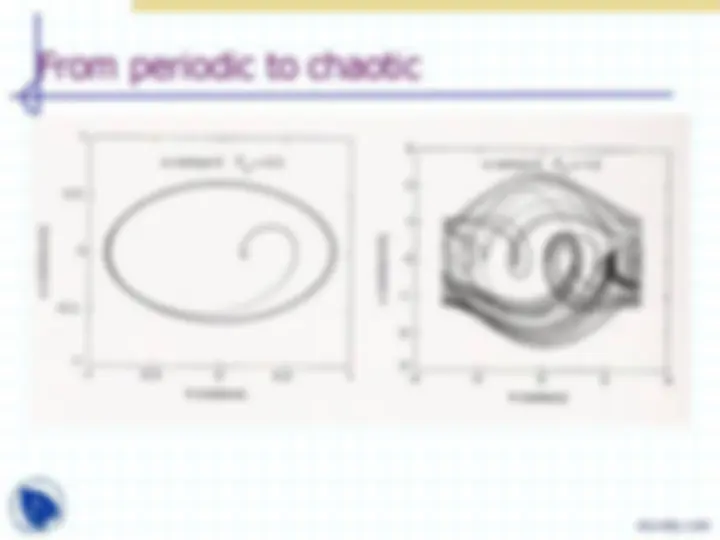
The Lorentz Strange Attractors
Mathematical meteorologist E. N. Lorentz came across three-dimensional nonlinear system which showed exotic behaviors. The model equations are
( x ( t ) y ( t )), dt
dx (^)
x(t)z(t) rx(t) y(t), dt
dy (^)
x ( t ) y ( t ) bz ( t )
dt
dz
Where , , r & b are constants. These equations are found in number of processes including motion of water wheel, lasers, dynamos and simple convection part of models for atmosphere.
Lorentz simulated three-dimensional trajectories for above system and found that trajectory is a set of complicated shape and its not fixed points or limit cycles.