


By Dr. Subhendu Kumar Rath, BPUT Page 1
Prepared by Dr. Subhendu Kumar Rath, BPUT

















































































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Operating system short notes computer science
Typology: Study notes
1 / 90

This page cannot be seen from the preview
Don't miss anything!
An operating System is a collection of system programs that together control the operations of a computer system. Some examples of operating systems are UNIX, Mach, MS-DOS, MS-Windows, Windows/NT, Chicago, OS/2, MacOS, VMS, MVS, and VM.
Execute user programs and make solving user problems easier. Make the computer system convenient to use. Use the computer hardware in an efficient manner.
programs for the various users.
problems of the users (compilers, database systems, video games, business programs).
Control program – controls the execution of user programs and operations of I/O devices.
(1)Kernel is an active part of an OS i.e., it is the part of OS running at all times. It is a programs which can interact with the hardware. Ex: Device driver, dll files, system files etc. (2) Shell is called as the command interpreter. It is a set of programs used to interact with the application programs. It is responsible for execution of instructions given to OS (called commands). Operating systems can be explored from two viewpoints: the user and the system. User View: From the user’s point view, the OS is designed for one user to monopolize its resources, to maximize the work that the user is performing and for ease of use. System View: From the computer's point of view, an operating system is a control program that manages the execution of user programs to prevent errors and improper use of the computer. It is concerned with the operation and control of I/O devices.
Increased data availability Enhanced reliability Protection System Protection refers to a mechanism for controlling access by programs, processes, or users to both system and user resources. The protection mechanism must: distinguish between authorized and unauthorized usage. specify the controls to be imposed. provide a means of enforcement. Command-Interpreter System Many commands are given to the operating system by control statements which deal with: process creation and management I/O handling secondary-storage management main-memory management file-system access protection networking The program that reads and interprets control statements is called variously: command-line interpreter shell (in UNIX) Its function is to get and execute the next command statement.
System Components Operating System Services System Calls System Programs System Structure Virtual Machines System Design and Implementation System Generation Common System Components Process Management Main Memory Management File Management I/O System Management Secondary Management Networking Protection System Command-Interpreter System
Lecture # Evolution of OS:
Reduce setup time by batching similar jobs Automatic job sequencing – automatically transfers control from one job to another. First rudimentary operating system. Resident monitor initial control in monitor control transfers to job when job completes control transfers pack to monitor
This type of OS accepts more than one jobs and these jobs are batched/ grouped together according to their similar requirements. This is done by computer operator. Whenever the computer becomes available, the batched jobs are sent for execution and gradually the output is sent back to the user. It allowed only one program at a time. This OS is responsible for scheduling the jobs according to priority and the resource required.
Lecture #
Following are the five services provided by operating systems to the convenience of the users.
System calls provide an interface between the process and the operating system. System calls allow user-level processes to request some services from the operating system which process itself is not allowed to do. For example, for I/O a process involves a system call telling the operating system to read or write particular area and this request is satisfied by the operating system. The following different types of system calls provided by an operating system: Process control end, abort load, execute create process, terminate process get process attributes, set process attributes wait for time wait event, signal event allocate and free memory
File management create file, delete file open, close read, write, reposition get file attributes, set file attributes Device management request device, release device read, write, reposition get device attributes, set device attributes logically attach or detach devices Information maintenance get time or date, set time or date get system data, set system data get process, file, or device attributes set process, file, or device attributes Communications create, delete communication connection send, receive messages transfer status information attach or detach remote devices
OS/2 Layer Structure Microkernel System Structure Moves as much from the kernel into “user” space. Communication takes place between user modules using message passing. Benefits:
What operating-system options are desired, or what parameter values are to be used? These options or values might include how many buffers of which sizes should be used, what type of CPU-scheduling algorithm is desired, what the maximum number of processes to be supported is. Booting –The procedure of starting a computer by loading the kernel is known as booting the system. Most computer systems have a small piece of code, stored in ROM, known as the bootstrap program or bootstrap loader. This code is able to locate the kernel, load it into main memory, and start its execution. Some computer systems, such as PCs, use a two-step process in which a simple bootstrap loader fetches a more complex boot program from disk, which in turn loads the kernel. Lecture # Computer-System Architecture Computer-System Operation I/O devices and the CPU can execute concurrently. Each device controller is in charge of a particular device type. Each device controller has a local buffer. CPU moves data from/to main memory to/from local buffers I/O is from the device to local buffer of controller. Device controller informs CPU that it has finished its operation by causing an interrupt. Common Functions of Interrupts Interrupt transfers control to the interrupt service routine generally, through the interrupt vector, which contains the addresses of all the service routines. Interrupt architecture must save the address of the interrupted instruction. Incoming interrupts are disabled while another interrupt is being processed to prevent a lost interrupt. A trap is a software-generated interrupt caused either by an error or a user request. An operating system is interrupt driven. Interrupt Handling The operating system preserves the state of the CPU by storing registers and the program counter. Determines which type of interrupt has occurred: polling, vectored interrupt system Separate segments of code determine what action should be taken for each type of interrupt Interrupt Time Line For a Single Process Doing Output
I/O Structure After I/O starts, control returns to user program only upon I/O completion. Wait instruction idles the CPU until the next interrupt Wait loop (contention for memory access). At most one I/O request is outstanding at a time, no simultaneous I/O processing. After I/O starts, control returns to user program without waiting for I/O completion. System call – request to the operating system to allow user to wait for I/O completion. Device-status table contains entry for each I/O device indicating its type, address, and state. Operating system indexes into I/O device table to determine device status and to modify table entry to include interrupt. Two I/O Methods
Device-Status Table
I/O Protection Memory Protection CPU Protection Dual-Mode Operation Sharing system resources requires operating system to ensure that an incorrect program cannot cause other programs to execute incorrectly. Provide hardware support to differentiate between at least two modes of operations. User mode – execution done on behalf of a user. Monitor mode (also kernel mode or system mode) – execution done on behalf of operating system. Mode bit added to computer hardware to indicate the current mode: monitor (0) or user (1). When an interrupt or fault occurs hardware switches to Privileged instructions can be issued only in monitor mode. monitor user ,Interrupt/fault ,set user mode I/O Protection All I/O instructions are privileged instructions. Must ensure that a user program could never gain control of the computer in monitor mode (I.e.a user program that, as part of its execution, stores a new address in the interrupt vector). Memory Protection Must provide memory protection at least for the interrupt vector and the interrupt service routines. In order to have memory protection, add two registers that determine the range of legal addresses a program may access: Base register – holds the smallest legal physical memory address. Limit register – contains the size of the range Memory outside the defined range is protected. Hardware Protection When executing in monitor mode, the operating system has unrestricted access to both monitor and user’s memory. The load instructions for the base and limit registers are privileged instructions. CPU Protection Timer – interrupts computer after specified period to ensure operating system maintains control. Timer is decremented every clock tick. When timer reaches the value 0, an interrupt occurs. Timer commonly used to implement time sharing. Time also used to compute the current time. Load-timer is a privileged instruction.
Lecture # Process Concept Informally, a process is a program in execution. A process is more than the program code, which is sometimes known as the text section. It also includes the current activity, as represented by the value of the program counter and the contents of the processor's registers. In addition, a process generally includes the process stack, which contains temporary data (such as method parameters, return addresses, and local variables), and a data section, which contains global variables. An operating system executes a variety of programs: Batch system – jobs Time-shared systems – user programs or tasks Process – a program in execution; process execution must progress in sequential fashion. A process includes: program counter , stack, data section
As a process executes, it changes state New State: The process is being created. Running State: A process is said to be running if it has the CPU, that is, process actually using the CPU at that particular instant. Blocked (or waiting) State: A process is said to be blocked if it is waiting for some event to happen such that as an I/O completion before it can proceed. Note that a process is unable to run until some external event happens. Ready State: A process is said to be ready if it needs a CPU to execute. A ready state process is runnable but temporarily stopped running to let another process run. Terminated state: The process has finished execution. What is the difference between process and program?
Representation of Process Scheduling Schedulers A scheduler is a decision maker that selects the processes from one scheduling queue to another or allocates CPU for execution. The Operating System has three types of scheduler:
Time dependent on hardware support.
Parent process create children processes, which, in turn create other processes, forming a tree of processes.
Children share subset of parent’s resources. Parent and child share no resources.
Parent waits until children terminate.
Child has a program loaded into it.
fork system call creates new process exec system call used after a fork to replace the process’ memory space with a new program.
Process executes last statement and asks the operating system to decide it (exit). Output data from child to parent (via wait). Process’ resources are deallocated by operating system. Parent may terminate execution of children processes (abort). Child has exceeded allocated resources. Task assigned to child is no longer required. Parent is exiting. Operating system does not allow child to continue if its parent terminates. Cascading termination.
The concurrent processes executing in the operating system may be either independent processes or cooperating processes. A process is independent if it cannot affect or be affected by the other processes executing in the system. Clearly, any process that does not share any data (temporary or persistent) with any other process is independent. On the other hand, a process is cooperating if it can affect or be affected by the other processes executing in the system. Clearly, any process that shares data with other processes is a cooperating process. Advantages of process cooperation Information sharing: Since several users may be interested in the same piece of information (for instance, a shared file), we must provide an environment to allow concurrent access to these types of resources. Computation speedup: If we want a particular task to run faster, we must break it into subtasks, each of which will be executing in parallel with the others. Such a speedup can be achieved only if the computer has multiple processing elements (such as CPUS or I/O channels). Modularity: We may want to construct the system in a modular fashion, dividing the system functions into separate processes or threads Convenience: Even an individual user may have many tasks on which to work at one time. For instance, a user may be editing, printing, and compiling in parallel. Concurrent execution of cooperating processes requires mechanisms that allow processes to communicate with one another and to synchronize their actions.
switching to user mode jumping to the proper location in the user program to restart that program Dispatch latency – time it takes for the dispatcher to stop one process and start another running. Scheduling Criteria CPU utilization – keep the CPU as busy as possible Throughput – # of processes that complete their execution per time unit Turnaround time – amount of time to execute a particular process Waiting time – amount of time a process has been waiting in the ready queue Response time – amount of time it takes from when a request was submitted until the first response is produced, not output (for time-sharing environment) Optimization Criteria Max CPU utilization Max throughput Min turnaround time Min waiting time Min response time
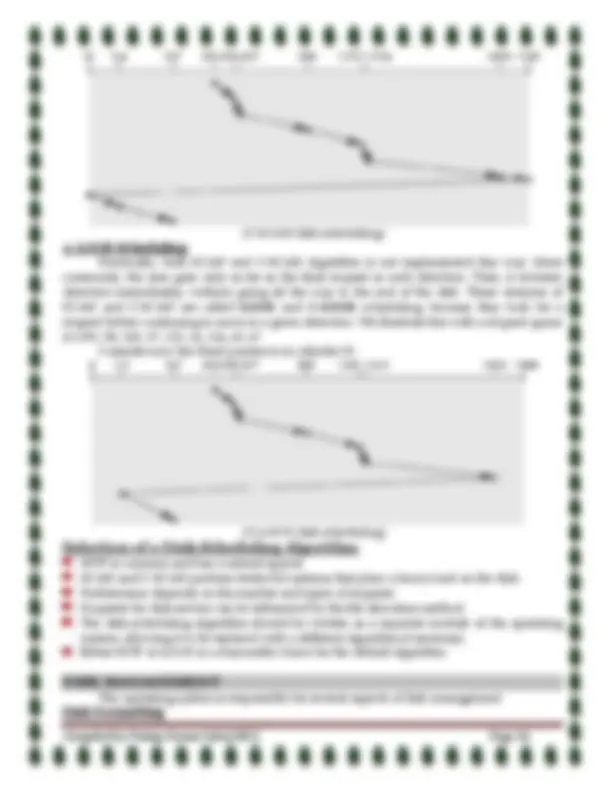
By far the simplest CPU-scheduling algorithm is the first-come, first-served (FCFS) scheduling algorithm. With this scheme, the process that requests the CPU first is allocated the CPU first. The implementation of the FCFS policy is easily managed with a FIFO queue. When a process enters the ready queue, its PCB is linked onto the tail of the queue. When the CPU is free, it is allocated to the process at the head of the queue. The running process is then removed from the queue. The code for FCFS scheduling is simple to write and understand. The average waiting time under the FCFS policy, however, is often quite long. Consider the following set of processes that arrive at time 0, with the length of the CPU-burst time given in milliseconds: Process Burst Time PI 24 P2 3 P3 3 If the processes arrive in the order PI, P2, P3, and are served in FCFS order, we get the result shown in the following Gantt chart: The waiting time is 0 milliseconds for process PI, 24 milliseconds for process PZ, and 27 milliseconds for process P3. Thus, the average waiting time is (0 + 24 + 27)/3 = 17 milliseconds. If the processes arrive in the order P2, P3, Pl, however, the results will be as shown in the following Gantt chart: The average waiting time is now (6 + 0 + 3)/3 = 3 milliseconds. This reduction is substantial. Thus, the average waiting time under a FCFS policy is generally not minimal, and may vary substantially if the process CPU-burst times vary greatly. In addition, consider the performance of FCFS scheduling in a dynamic situation. Assume we have one CPU-bound process and many I/O-bound processes. As the processes flow around the system, the following scenario may result. The CPU-bound process will get the CPU and hold it. During this time, all the other processes will finish their I/O and move into the ready queue, waiting for the CPU. While the processes wait in the ready queue, the I/O devices are idle. Eventually, the CPU-bound process finishes its CPU burst and moves to an I/O device. All the I/O-bound processes, which have very short CPU bursts, execute quickly and move back to the I/O queues. At this point, the CPU sits idle.
The CPU-bound process will then move back to the ready queue and be allocated the CPU. Again, all the I/O processes end up waiting in the ready queue until the CPU-bound process is done. There is a convoy effect, as all the other processes wait for the one big process to get off the CPU. This effect results in lower CPU and device utilization than might be possible if the shorter processes were allowed to go first. The FCFS scheduling algorithm is non-preemptive. Once the CPU has been allocated to a process, that process keeps the CPU until it releases the CPU, either by terminating or by requesting I/O. The FCFS algorithm is particularly troublesome for time-sharing systems, where each user needs to get a share of the CPU at regular intervals. It would be disastrous to allow one process to keep the CPU for an extended period. Shortest-Job-First Scheduling A different approach to CPU scheduling is the shortest-job-first (SJF) scheduling algorithm. This algorithm associates with each process the length of the latter's next CPU burst. When the CPU is available, it is assigned to the process that has the smallest next CPU burst. If two processes have the same length next CPU burst, FCFS scheduling is used to break the tie. Note that a more appropriate term would be the shortest next CPU burst, because the scheduling is done by examining the length of the next CPU burst of a process, rather than its total length. We use the term SJF because most people and textbooks refer to this type of scheduling discipline as SJF. As an example, consider the following set of processes, with the length of the CPU-burst time given in milliseconds: Process Burst Time PI 6 p2 8 p3 7 p4 3 Using SJF scheduling, we would schedule these processes according to the following Gantt chart: The waiting time is 3 milliseconds for process PI, 16 milliseconds for process P2,9 milliseconds for process PS, and 0 milliseconds for process Pq. Thus, the average waiting time is (3 + 16 + 9 + 0)/4 = 7 milliseconds. If we were using the FCFS scheduling scheme, then the average waiting time would be 10.25 milliseconds. The SJF scheduling algorithm is provably optimal, in that it gives the minimum average waiting time for a given set of processes. By moving a short process before a long one, the waiting time of the short process decreases more than it increases the waiting time of the long process. Consequently, the average waiting time decreases. The real difficulty with the SJF algorithm is knowing the length of the next CPU request. For long-term (or job) scheduling in a batch system, we can use as the length the process time limit that a user specifies when he submits the job. Thus, users are motivated to estimate the process time limit accurately, since a lower value may mean faster response. (Too low a value will cause a time-limit exceeded error and require resubmission.) SJF scheduling is used frequently in long-term scheduling. Although the SJF algorithm is optimal, it cannot be implemented at the level of short-term CPU scheduling. There is no way to know the length of the next CPU burst. One approach is to try to approximate SJF scheduling. We may not know the length of the next CPU burst, but we may be able to predict its value.We expect that the next CPU burst will be similar in length to the previous ones. Thus, by computing an approximation of the length of the next CPU burst, we can pick the process with the shortest predicted CPU burst. The SJF algorithm may be either preemptive or nonpreemptive. The choice arises when a new process arrives at the ready queue while a previous process is executing. The new process may have a shorter next CPU burst than what is left of the currently executing process. A preemptive SJF algorithm will preempt the currently executing process, whereas a nonpreemptive SJF algorithm will allow the currently running process to finish its CPU burst. Preemptive SJF scheduling is sometimes called shortest-remaining-time-first scheduling.