


Optimization - 2
CMSC828 D








Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Various optimization techniques, including cost functions, bracketing methods in one and multiple dimensions, and gradient descent. It discusses how to find the global minimum and local minimum of a cost function, the importance of derivative information, and different methods for bracketing a minimum in one and multiple dimensions. The document also introduces the downhill simplex method and basic calculus concepts, such as the direction of maximum increase and critical points of a function.
Typology: Study notes
1 / 19

This page cannot be seen from the preview
Don't miss anything!
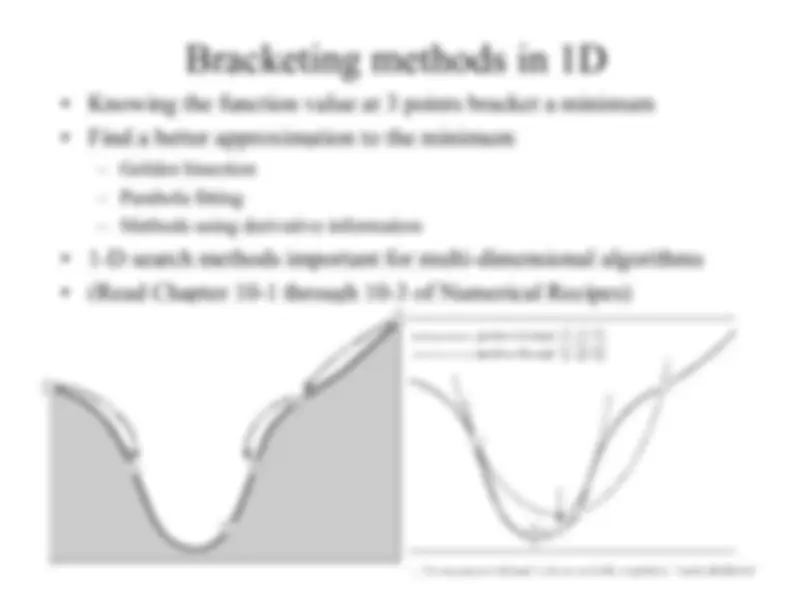
Bracketing a minimum in multiple dimensions
( ) (^) j ( (^) i i ) (^) j ( (^) i ) (^) i j 0 i
g g x h g x h x
∂
g x h