



Optimization over Manifolds with applications to
Robotic Needle Steering and Channel Layout Design
docsity.com







Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Optimization over manifolds, a generalization of optimization over euclidean spaces. Nonholonomic systems, c-spaces as manifolds, optimization over the rotation group so(3), and projection operators. Applications include robotics, graphics, and vision. The document also discusses steerable needles and channel layout design in brachytherapy.
Typology: Slides
1 / 25

This page cannot be seen from the preview
Don't miss anything!
Optimization over vector spaces n
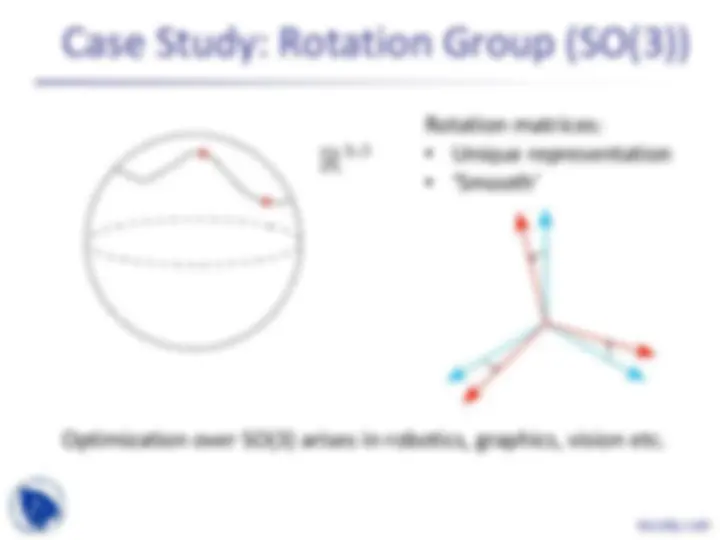
Rolling Ball:? (^2) SO (3)
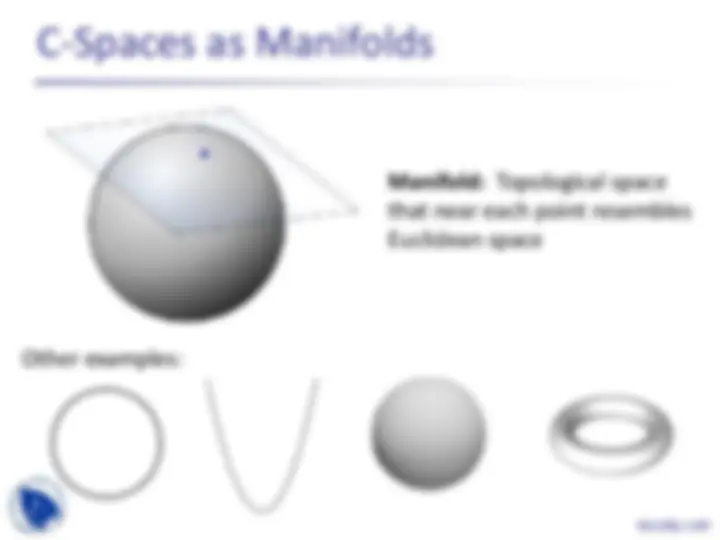
Manifold: Topological space that near each point resembles Euclidean space
Other examples:
n
n
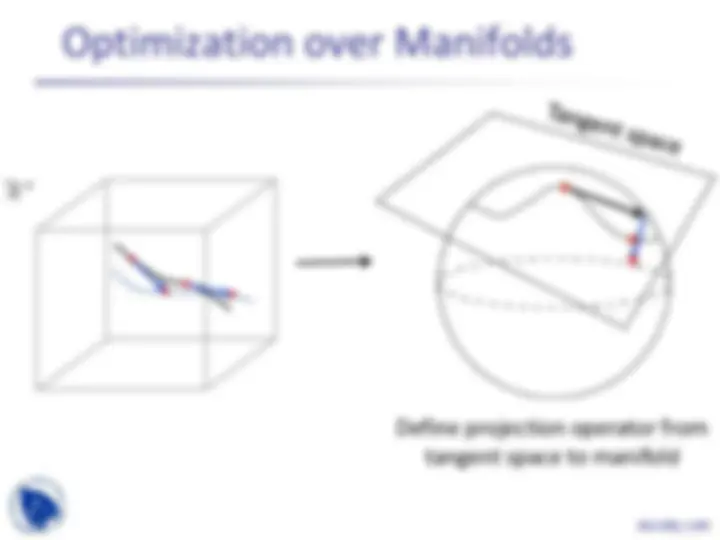
Define projection operator from tangent space to manifold
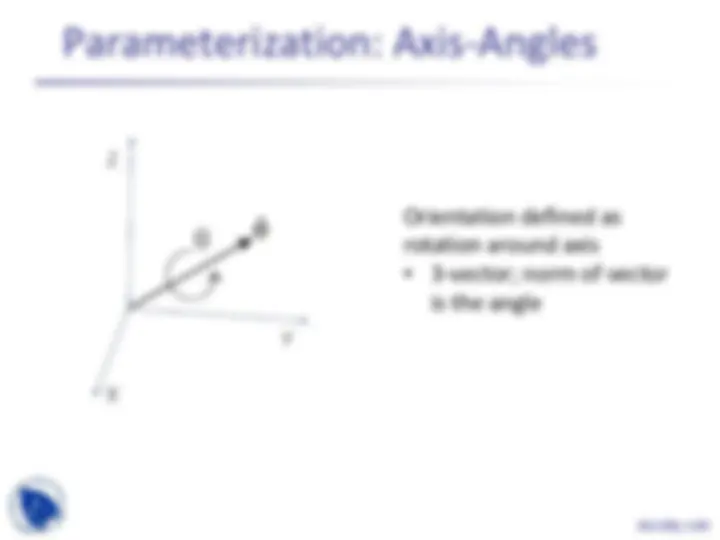
: Incremental rotation to reference rotation defined in terms of axis-angle
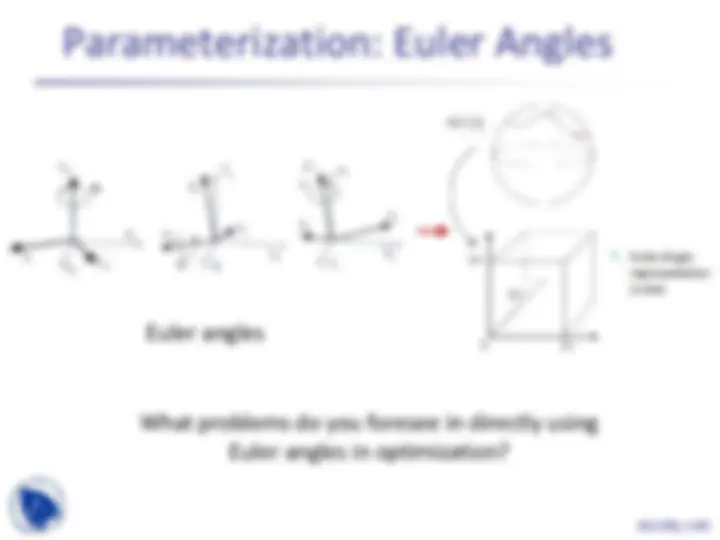
Why not directly optimize over rotation matrix entries?
Over-constrained (orthonormality) Larger number of optimization variables
Define local parameterization in terms of incremental rotation
[ ]
r
: Point on SO(3) that can be reached by traveling along the geodesic in direction
0 0 0
z y z x y x
r r r r r r
0
k
matrix exponential operator
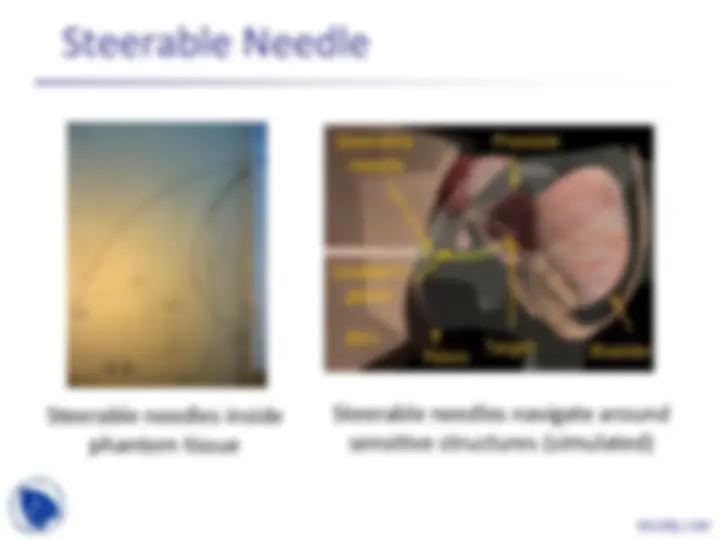
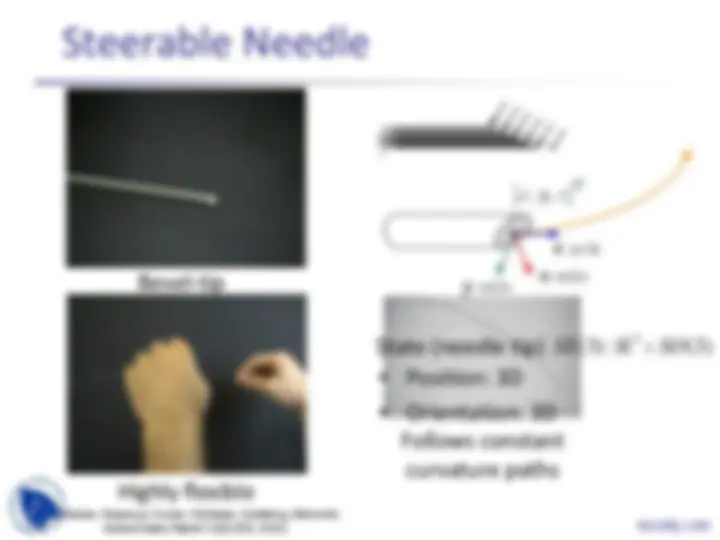
Steerable needle
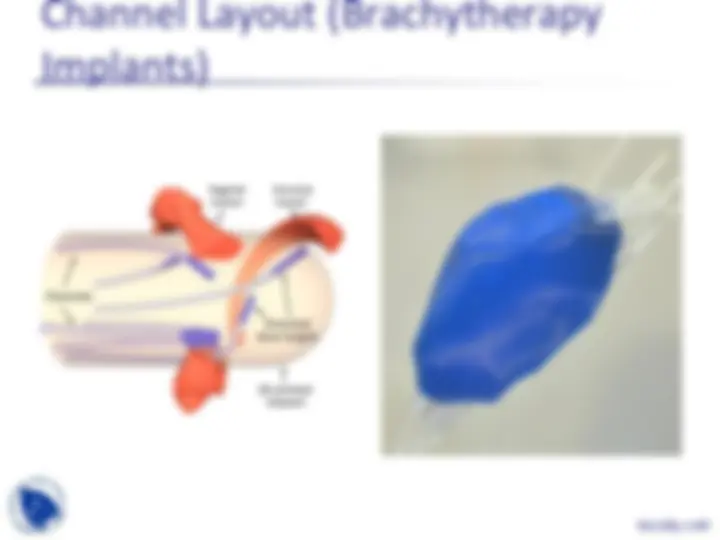
Target (^) Bladder
Prostate
Pelvis
Skin
Cowper’s gland
Steerable needles inside phantom tissue
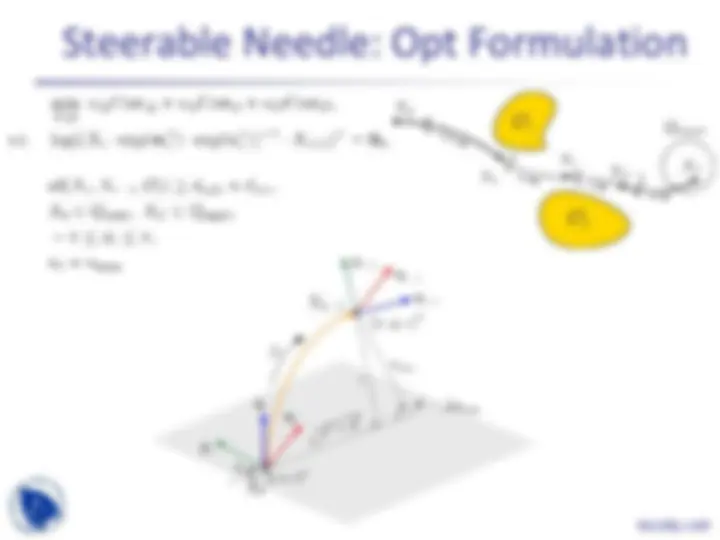
Steerable needles navigate around sensitive structures (simulated)
[Webster, Okamura, Cowan, Chirikjian, Goldberg, AlterovitzUnited States Patent 7,822,458. 2010]
Bevel-tip
Highly flexible
Reaction forces from tissue
Follows constant curvature paths
State (needle tip)
SE (3) : 3 SO (3)
Why is minimizing twist important?