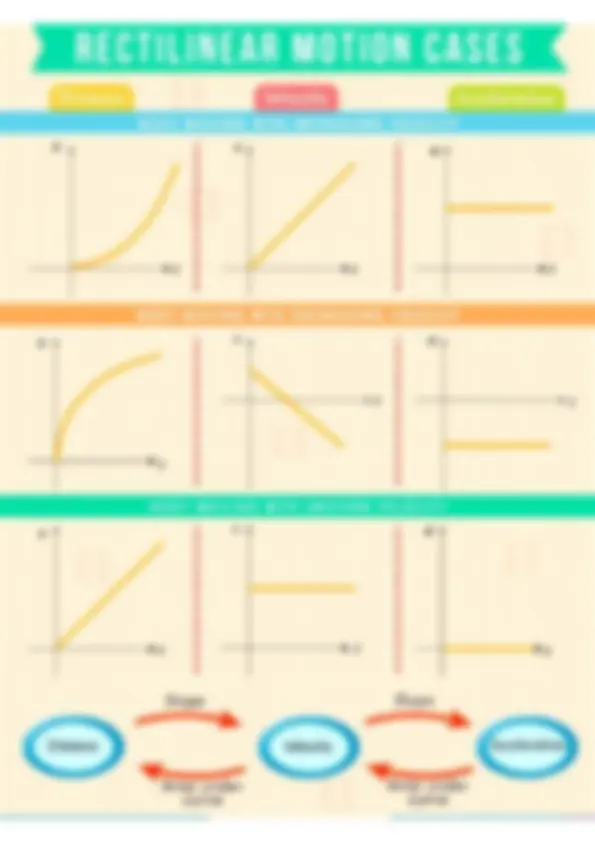
Partial preview of the text
Download Physics flash cards or short notes and more Cheat Sheet Physics in PDF only on Docsity!
nit i star NT OITECEIG POET TS STO} Te ee phy: The quantities which can be measured by an instrument and by means of which we can describe the laws of physics are called physical quantities. f a me TYPES OF PHYS (CAL QUANTITIES : a » DERIVED SUPPLEMENTRY physical quanti Physical quantities which been hosen can be expressed as a arbitrarily and their unit combination of base are used f quantities are called derived the physical quantit quantities. Length [m] Time [s] ane gta Magnitude of physical quantity = ( I vale Magnitude of a physical quantity is quenan constant. iti is independent of the type of unit. n,U,=n,u,= constant FUNDAMENTAL QUANTITY UNITS DIMENSIONS Dimensions of a physical quantity are the power to which the fundamental ! quantities must be raised to represent the given physical quantity. \ es et Se ere ee oF n, [u,] =n, [u,] Suppose the dimensions of a physical quantity are 'a' in mass, 'b’ in length and 'c' in time. If the fundamental units in one system are M,,L, and T, and in the other system are M,,L, andT, respectively. Then we can write. a,b.c a,boc n,[M,L,T,] = n,[M,L,T,] Every physical equation should be dimensionally balanced. This is called the ‘Principle of Homogeneity’. The dimensions of each term on both sides of an equation must be the same. Note: A dimensionally correct equation may or may not be physically correct. PRINCIPLE OF HOMOGENEITY OF DIMENSIONS This principle states that the dimensions of all the terms in a physical expression should be same. . . 4 1 - . For e.g, in the physical expression s = ut Ue at?, the dimensions of s, ut and at’ all are same. 2 Note: Physical quantities separated by the symbols +, -, =, >, < efc., have the same dimensions. By this method, the value of dimensionless constant can not be calculated. By this method, the equation containing trigonometrical, exponential and logarithmic terms cannot be analysed. If a physical quantity depends on more than three factors, then relation among them cannot be established because we can have only three equations by equating the powers of M, L and T. RULES OF ADDITION & SUBTRACTION RULE The absolute random errors add IfR=A+B,or R=A-B,thenr=a+b POWER RULE When a quantity Q is raised to a power P, the relative error in the result is P times the WKy relative error in Q. This also holds for negative powers. IFR= QV, then — = Px 2 PRODUCT & QUOTIENT RULE The relative random errors add 02 fRash orke— lea <4 B R A B Q VERNIER Least count of Vernier Callipers The least count of Vernier Callipers (v.c) is the minimum value of correct estimation of length without eye estimation. If N‘* division of vernier calliper coincides with (N-1) division of main scale, then N(vs)=(N-1)ms => lvs= Nt ms vs = Vernier Scale Reading : ms=Main Scale Reading ( ‘) <}— Locking Screw (for measuring Inner dimension) Imperial Scale Metric Scale(ms) (for measuring Outer dimension) —> Jaws \ 4 Vernier Scale (vs) Vernier Constant = 1 ms - 1 vs = [- vt ms = ms, which is equal to the value of the smallest division on the main scale divided by total number of divisions on the vernier scale. The instrument is provided with @ The main scale or pitch scale is (M) graduated along the axis of screw. ® The cap-scale or head scale (H) around the edge of the screw head. spindle Sleeve (with main scale) Ratchet Ratchet <}+——- Frame \ J Pitch :- The pitch of the instrument is distance between two consecutive threads of the screw which is equal to the distance moved by the screw due to one complete rotation of the cap. Thus for, 10 rotation of cap = 5 mm, then pitch = 0.5 mm. Least count :- The minimum (or least) measurement (or count) of length is equal to one division on the head scale which is equal to pitch divided by the total cap divisions. Pitch Least counts: ———————— — Total cap divisions screw Measurement of length by Length, L = n « pitch + f x least count, where n = main scale reading & f = caps scale reading Zero Error In a perfect instrument the zero of the main scale coincides with the line of gradiation along the screw axis with no zero-error, otherwise the instrument is said to have zero-error which is equal to the cap reading with the gap closed. This error is positive when zero line of reference line of the cap lies below the line of graduation and vice-versa. The corresponding corrections will be just opposite. MOTION UNDER GRAVITY o i < 0 nn wt 5 < cy 1 oa ion wou nuud O(t) — 1/2gt? Equa f motior i CHR O = ut - 1/2gt? -v = 0-8 —h =-ut — 1/2gt? : h = ut - I/2gt? -v =u-gt v? = (0)? + 2gh =¥ =u at h = ut — 1/2gt? 0 — gt -v =u-gt 2 v2 = u?- 2g(0) v = tV2gh u?+ 2gh Eee SOFT Va es BODY MOVING WITH DECREASING VELOCITY or an aera rare a | . . i Va H as 1 1 i) 1 : 1 ' i] rt 1 >t i) iJ i] ' 1 1 pos ' ' i) ' ' i] BODY MOVING WITH UNIFORM VELOCITY a . r, . A x i v 4 ' i] 1 1 ! 1 1 e_—_ee_—ssseeeeees 1 ' ' 1 1 1 1 ' 1 —— > | Spake) lSeeeeSesseery oma Sameer t ' i] Slope Slope Acceleration es Go ann Qo Bee Area under Area under curve curve RELATIVE WELOCITY Relative velocity of AwrtB absolute velocity of river ! Time taken by boatman to cross the river: — Vbr Cos 6) Displacement along x-axis when he reaches on the other bank: w a — x = (Vr - Vbr sind) Vi, cond Vor velocity of boatman with respect to river or velocity of boatman in still water Vb absolute velocity of boatman. 1. Condition when the boatman 1 2. Condition when the boatman wants crosses the river in shortest to reach point B, i.e., at a point just interval of time- opposite from where he started 3. Shortest Path when V; < Vir—* Smin = Ww tmin = 1 1 1 1 1 | when V; > Ver —~ 1 ' Vv ! Smin = w{ — ' Vor i} easeccesescceses. —> Air speed (Fz -” — \ Vaw = Velocity of aircraft wrt wind ' Va = Vaw + Vw } as =! Vw = Velocity of wind —? i Va = Absolute Velocity of aircraft =p e = Velocity of river wrt ground Vv, rd ‘ + i : ' Vim = Velocity of river wrt man | Veg = Vim + Vg} ‘, ‘ ~ Va Velocity of man wrt ground PROJECTILE MOTION == INDIAN BATSMAN SIXES ine oi HITTING STYLE De ou ++ 2 5s s/s * — sila a ’ Time of flight T mee Equation of Trajectory Part Ill 4 PROJECTILE MOTION DOWN THE INCLINED PLANE Range R = ucosaT + —— + gsing Tr 2usina gcosp Time of flight T = @e® PROJECTILE MOTION UP THE INCLINED PLANE Range R = ucosaT — 4 gsinp T? 2using. Time of flight T = gntT =~ ccosp Electromagnetic The force that an electromagnetic field ‘exerts on electrically charged particles. It is defined as the attraction oF repulsion of different particles and materials based on their electrical charges Gravitational The force that attracts any object with mass. Every object. including you, is pulling on every other object in the entire universe! It’s the attraction or repulsion that arises between electrically charged —_ particles because of their motion. or pull appl Nuclear Nuclear Force Is defined as the force exerted between The force that occurs different nucleons. The force between bodies due Is attractive in nature and it to their contact is binds protons and neutrons in contact force the nucleus together. The normal force is the bamameirypeich {pcg Friction force is the support force exerted is exerted equally on both | tovee exerted by a “ ‘ends of a cable, chain, rope, upon an object that is surface as an object ‘in contact with another Mates Of. Cee Coren moves across it or ‘object and is transmitted stable object. makes an effort to 2 y between the ends by that move across it object Part Il APPLICATION OF N.L.M 1) Motion of a Block on a Horizontal Smooth Surface Horizontal pull [ Case (ii) Tn) acting at an angle (() Motion of Bodies in Contact Two Body System GED three Body sical F maF ; =>a = —— & f= ———_ a mi + m2 mi + m2 mi-+ ma+ m3 Motion of a Body on a Smooth Inclined Plane , , @ T> mg, man accelerates in upward direction a=gsin0 N=mgcosi : 5. » @ T< mg, man accelerates in downward direction N : F.B.D of man & ’ Rope tr mgsint . mgcoso : fe » Climbing on the Rope PULLEY BLOCK SYSTEM mg 7%, 28 5 a | MINIMUM FORCE REQUIRED TO MOVE THE BODY kd F umg Tew min N = Normal force mg FRICTION AS A COMPONENT OF CONTACT FORCE F. = Contact force N = Normal force Pata 4 N* * N’* {etave uN } Emax = N,/ w+ MOTION ON A ROUGH INCLINED PLANE N Balancing Vertical Forces N=mgcos0 Balancing Horizontal Forces = uN = lL mg cosé mg cos) When sliding with acceleration ‘a' mg sin® - mg cos( = ma ANGLE OF REPOSE The angle of repose is the maximum angle that a surface can be tilted from the horizontal, such that f an object on it is just able to stay on the surface without moving. or |fang, = Lt mg sin® mg cos where |).is called angle of repose. art CIRCULAR MOTION When a particle moves in a plane such that its distance from a fixed (or moving) point remains constant then its motion is called a circular motion with respect to that fixed (or moving) point. = = Average Angular Velocity _ Total Angle of Rotation iid Total time taken ae — &-% _ Ad t= ty At where 6, and 6; are angular position of the particle at time ti and te respectively. Instantaneous Angular Velocity Relative Angular Velocity (Vas) 1 Oe I 1 The rate at which the position vector of a ' particle with respect to the centre rotates, is : called as instantaneous angular velocity with 1 1 f 1 ! ' respect to the centre. . . here Vas, = Relative velocity perpendicular oz lim, 48 _ 08 to position vector AB At-0 At dt