Download Planetary Circumnavigation and more Exams Communication in PDF only on Docsity!
Carnegie Mellon Planetary Circumnavigation
Planetary Circumnavigation
Mission Concept Definition and Technology Assessment for
Sustained Surface Exploration of the Terrestrial Planets
NASA Institute for Advanced Concepts
2002 Phase I Grant (USRA # 07600-102)
Final Study Report (v4.4)
David Wettergreen
Michael Wagner
Fayette Shaw
Carnegie Mellon Planetary Circumnavigation
Abstract
In 1522, after almost three years underway, Ferdinand Magellan’s expedition returned to Spain completing the first circumnavigation of our planet. It was an almost unthinkable achievement. The concept we develop here is similarly revolutionary, the circumnavigation of the inner planets of our solar system. If achievable, the potential for missions of surface exploration is profound. When we have determined the means to increase the distance and duration of planetary surface exploration by orders of magnitude, the significance will be apparent in the design of future surface missions. The nature of scientific inquiry will change to reflect the newfound ability to study regional geology, search countless sites for signs of life, collect seasonal atmospheric and hydrologic information, and, in general, perform global scientific investigations. These investigations will test specific hypotheses but will also benefit from large, diverse data sets, allow comparative analysis, and enable systemic understanding of planetary processes in a way currently only envisioned on Earth. In this concept study we will discuss: technological benefits to power for long-duration, long-distance operations and to thermal regulation between planetary extremes, scientific benefits in rich observations and comprehensive examination of vast regions, economic benefits to the typical short-duration mission profile and eventual commercial development of the planets, and social benefits from the spirt of great adventure and the familiarization of our neighborhood of planets. This study examines the viability of planetary circumnavigation, as a result of long-distance missions of exploration, and identifies the major issues for consideration.
Table of Contents
vi
List of Figures
Figure 1-1: A view from the North Pole of Magellan’s route around the Earth leading to the first planetary circumnavigation.................................................................. 2
Figure 1-2: In three decades planetary rovers have miniaturized and increased in operational life and capability including autonomy and high-precision scientific sensing. Distances have not increased.. 6
Figure 2-1: Technologies that will increase mission duration for sustainable rovers will enable ambitious, long-duration missions such as planetary circumnavigation................................. 8
Figure 2-2: Wind speed at latitude and longitude for Venus, Earth and Mars................... 14
Figure 2-3: Comparative rover velocities for circumnavigation of the terrestrial planets clearly distin- guishes those for which surface traverse are feasible in a single day......................... 15
Figure 2-4: Comparison of planetary rovers versus distance traveled during operation and nominal ve- locity (inset line). Lunar rovers have all been directly teleoperated while Mars rovers, developed de- cades later, have some degree of autonomy. Traverse distances are insufficient for circumnavigation but velocities are relevant to some circumnavigation scenarios............................. 16
Figure 3-1: Mercury: With a long day (equivalent to 176 Earth days) circumnavigation by following the terminator may be possible and would enable thorough investigation of the structure of Mercury’s core and magnetic field and the unusual materials and volatiles in its polar cold traps. Mercury hemisphere as imaged by Mariner flyby........................................ 18
Figure 3-2: Hermean global temperature gradient is stable at shallow depth because alternating hemi- spheres face the sun at perihelion (due to spin -orbit coupling)............................. 19
Figure 3-3: Hermean c raters and terrain east of Caloris Basin. Lineated terrain is rough and the basin rim has cliffs 2km high but much of the lowland terrain is smooth........................... 20
Figure 3-4: Operating in the night-to-day terminator on Mercury............................ 21
Figure 3-5: Apparent retrograde motion of the Sun as viewed from surface of Mercury at perihelion 21
Figure 3-6: Images of Mercury circumnavigation by sun-synchronous equatorial traverse over 1 sol 22
Figure 3-7: Venus from Pioneer 10................................................... 23
Figure 3-8: Venusian surface topography as measured by Pioneer 12 radar through the atmosphere. 24
Figure 3-9: Temperature versus altitude for Venus, Earth and Mars......................... 25
Figure 3-10: Lunar polar circumnavigation in which the surface rover circles the polar region in 28 days maintaining synchrony with the Sun.................................................. 29
Figure 3-11: Mars visible (top) and elevation (bottom, from MOLA data) maps................. 30
Figure 3-12: Image of H2 distribution in the Martian north polar region as measured by the Mars Ob- server spacecraft indicating likely presence of water ice................................... 31
Figure 3-13: Mars north polar cap may contain permanent water-ice and seasonal carbon-dioxide ice. The cap itself is formed of many seasonally deposited layers, each trapping particles from annual global dust storms...................................................................... 32
Figure 3-14: Migratory exploration over a decade, moving to avoid the continuous winter night but seek-
List of Figures
vii
ing the long summer day results in a circumnavigation of Mars in about 10 years............... 33
Figure 4-1: Environmental parameters relative significance for the inner planets................ 36
Figure 4-2: Environmental parameters for each of the inner planets normalized by Earth values. Green: high magnitude and Red: low magnitude relative to Earth.................................. 37
Figure 4-3: Relationships between rover performance metrics and environmental characteristics (rela- tive to rover performance on Earth). Green: directly proportional with “P” strong positive and “p” weak positive correlation and Red: inversely proportional with “N” strong negative and “n” weak negative cor- relation......................................................................... 38
Figure 4-4: Fault probability versus time in a “bathtub curve” with explanation of reliability, survivability and sustainability................................................................. 41
Figure 4-5: Autocorrelation in rover performance metrics. Green: directly proportional with “P” strong positive and “p” weak positive and Red: inversely proportional with “N” strong negative and “n” weak negative........................................................................ 42
Figure 4-6: Impact of planetary surface environments on rover performance................... 43
Figure 4-7: Evaluation of significance of rover performance metrics for each planetary bodies..... 43
Figure 4-8: Relationships that configuration parameters have on rover performance metrics...... 46
Figure 4-9: Decision table to prioritize configuration parameters............................. 47
Figure 4-10: Prioritization of configuration parameters, in this case three configuration parameters are evaluated for use in a long-duration mission to the surface of Mercury........................ 48
Figure 4-11: Relative priority of each configuration parameter for each planet. The extreme environment of Venus makes nearly all configuration choices critical, highlighting the difficult technology develop- ments required to mount such a mission............................................... 49
Figure A-1: Mariner 10 image mosaic of the southern hemisphere of Mercury.................. 57
Figure A-2: 3-2 Spin orbit coupling means that the Hermean day is long than the year and that the same two hemispheres face the sun at perhelion leading to non-uniform heating (Figure 3-2).......... 58
Figure B-1: Temperature variation on Venus as a function of elevation....................... 67
Figure B-1: Ionosphere on Venus.................................................... 67
List of Tables
- 1 Introduction Table of Contents
- 1.1 Circumnavigation
- 1.2 Motivation.
- 1.2.1 Scientific
- 1.2.2 Technical
- 1.3 Objectives
- 1.4 Significance
- 1.5 Summary
- 2 Concept Definition
- 2.1 Challenges of Circumnavigation
- 2.1.1 Sufficient Power
- 2.1.2 Thermal Extremes and Cycling
- 2.1.3 Reliable Mobility
- 2.1.4 Necessary Autonomy
- 2.1.5 Long-term Sustainability
- 2.1.6 Instrument Miniaturization
- 2.2 Types of Circumnavigation
- 2.2.1 Orbital
- 2.2.2 Atmospheric
- 2.2.3 Surface
- 2.3 Benefit of Sustained Exploration
- 3 Mission Scenarios
- 3.1 Mercury
- 3.1.1 Environment
- 3.1.2 Exploration Objectives
- 3.1.3 Mission Scenarios
- 3.1.4 Technology Requirements
- 3.2 Venus
- 3.2.1 Environment
- 3.2.2 Exploration Objectives
- 3.2.3 Mission Scenarios
- 3.2.4 Technology Requirements
- 3.3 Moon.
- 3.3.1 Environment
- 3.3.2 Exploration Objectives
- 3.3.3 Mission Scenarios
- 3.3.4 Technology Requirements
- 3.4 Mars
- 3.4.1 Environment
- 3.4.2 Exploration Objectives
- 3.4.3 Mission Scenarios
- 3.4.4 Technology Requirements
- 4 Capability Analysis
- 4.1 Planetary Environments.
- 4.1.1 Characteristics of Planetary Environments
- 4.2 Rover Performance Metrics. iii
- 4.2.1 Performance Metric Definitions
- 4.2.2 Performance Metric Correlations
- 4.2.3 Performance Metric Analysis
- 4.3 Rover Configuration Challenges.
- 4.3.1 Configuration Parameters Definitions
- 4.3.2 Configuration Parameters and Performance Metrics
- 4.3.3 Configuration Parameter Analysis
- 4.4 Summary
- 5 Feasibility Issues
- 6 Conclusions
- 6.1 Promising Scenarios
- 6.1.1 Hermean Dawn-Following
- 6.1.2 Venusian Multi-landing High-altitude Aerial
- 6.1.3 Lunar Polar Sun-Synchronous
- 6.1.4 Martian 10-year Hemispherical Migration
- 6.2 Feasibility Issues.
- 6.3 Innovative Concepts.
- A Mercury
- A.1 Notable Characteristics
- A.2 Physical Parameters
- A.3 Characteristics
- A.3.1 Atmosphere
- A.3.2 Solar Wind
- A.3.3 Surface and Terrain characteristics
- A.4 Science Investigations
- A.5 Missions.
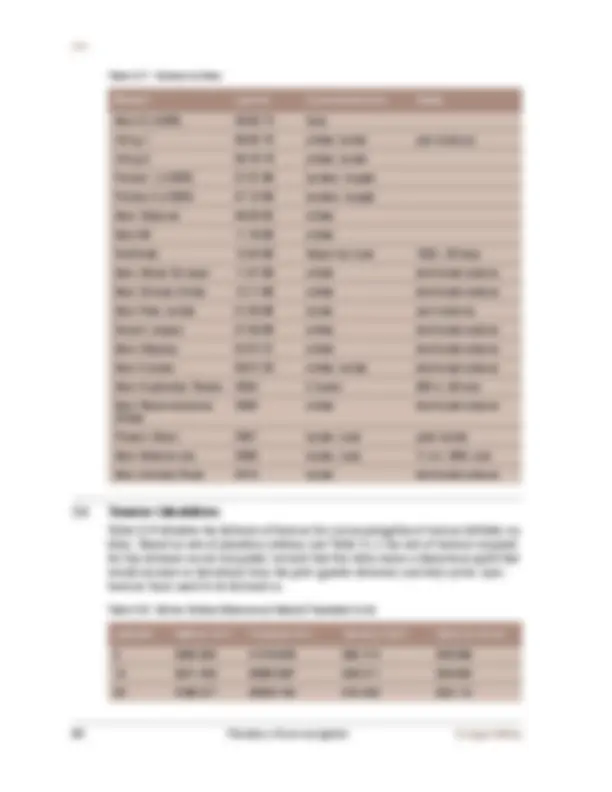
- A.6 Traverse Calculations
- B Venus
- B.1 Notable Characteristics
- B.2 Physical Parameters
- B.3 Characteristics
- B.3.1 Atmosphere
- B.3.2 Temperature
- B.3.3 Surface and Terrain Characteristics
- B.4 Science Objectives.
- B.4.1 Tectonics
- B.4.2 Runaway Greenhouse Effect
- B.5 Science Investigations
- B.6 Traverse Calculations
- C Moon
- C.1 Notable Characteristics
- C.2 Physical Parameters
- C.3 Characteristics
- C.3.1 Orbital
- C.3.2 Atmosphere
- C.4 Science Investigations. iv
- C.5 Missions.
- C.6 Traverse Calculations
- D Mars
- D.1 Notable Characteristics
- D.2 Physical Parameters
- D.3 Characteristics
- D.4 Science Investigations.
- D.5 Missions.
- D.6 Traverse Calculations
- E Bibliography
- Table 1-1: Progression of planetary exploration from focused to comprehensive science List of Tables
- Table 1-2: Scientific and technical aspects motivate sustained surface exploration.
- Table 3-1: Notable environmental characteristics of Mercury
- Table 3-2: Objectives of Hermean circumnavigation.
- Table 3-3: Specifications for circumnavigating Mercury
- Table 3-4: Notable environmental characteristics of Venus
- Table 3-5: Objectives of Venusian Circumnavigation
- Table 3-6: Atmospheric properties put into opposition to enable passive propulsion
- Table 3-7: Objectives in Circumnavigating the Moon
- Table 3-8: Rover speeds on the Moon varying with latitude given single sol constraint
- Table 3-9: Objectives for circumnavigation of Mars
- Table 4-1: Description of directly and inversely proportional relationships between parameters
- Table A-1: Hermean Physical Parameters
- Table A-2: Orbital Parameters of Mercury in Comparison to Earth.
- Table A-3: Orbital-dependent Parameters
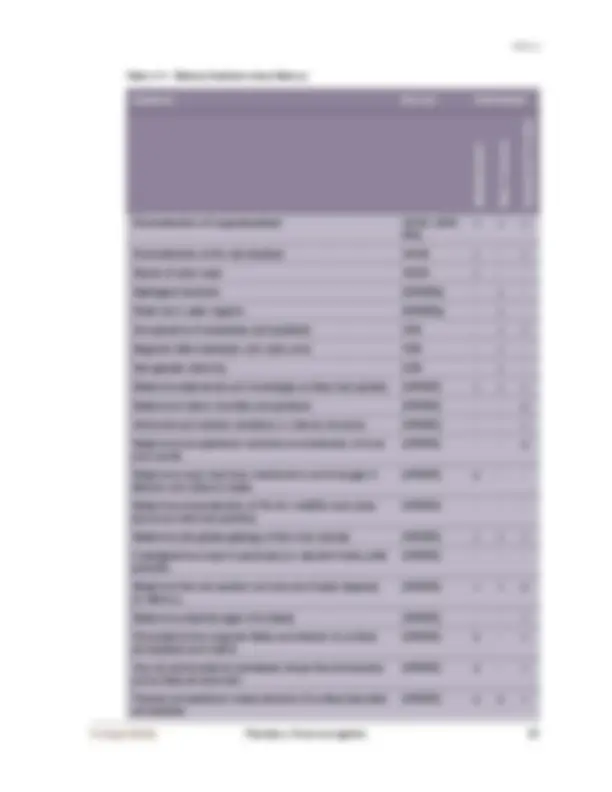
- Table A-4: Science Questions about Mercury.
- Table A-5: High Level Goals for Mercury
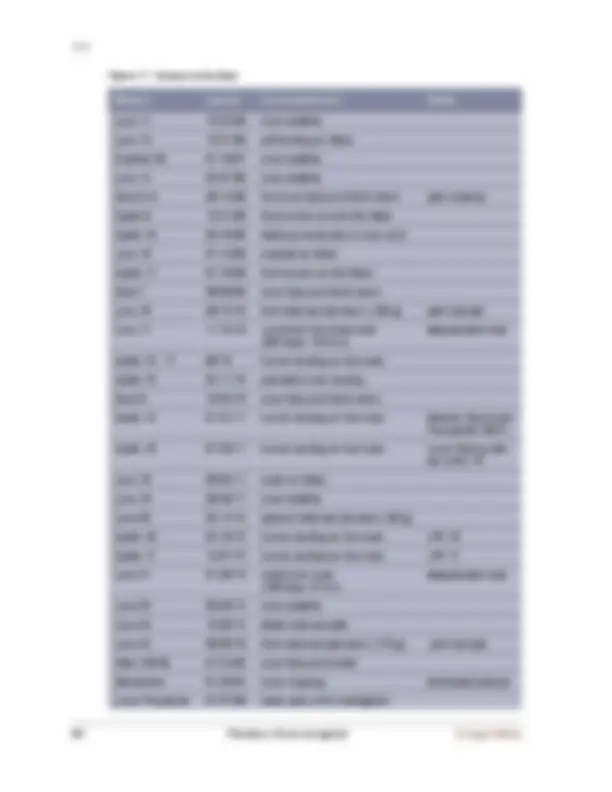
- Table A-6: Past and Future Missions to Mercury
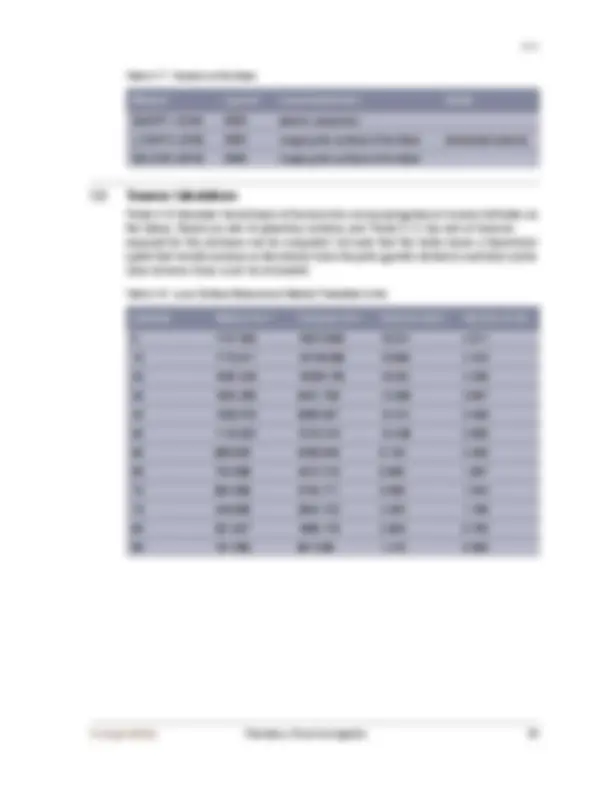
- Table A-7: Hermean Surface Distance and Velocity Theoretical Limits
- Table B-1: Venusian Physical Parameters
- Table B-2: Orbital Parameters
- Table B-3: Orbital-Dependant Parameters
- Table B-4: Science Questions and Relevance to Circumnavigation.
- Table B-5: High level goals for exploration on Venus
- Table B-6: Missions to Venus
- Table B-7: Venusian Surface Distance and Velocity Theoretical Limits
- Table C-1: Lunar Physical Parameters
- Table C-2: Lunar Orbital Parameters (for orbit about the Earth).
- Table C-3: Orbital-dependant Parameters
- Table C-4: Estimated Composition: Abundances in atmosphere
- Table C-5: Science Questions relevant to Circumnavigation
- Table C-6: High Level Goals for Lunar Exploration.
- Table C-7: Missions to the Moon
- Table C-8: Lunar Surface Distance and Velocity Theoretical Limits ix
- Table D-1: Martian Planetary Parameters
- Table D-2: Orbital Parameters of Mars
- Table D-4: Seasonal Duration on Mars [NESEN02]
- Table D-3: Variations in Orbit
- Table D-5: Science Investigations for Mars.
- Table D-6: High Level Exploration goals on Mars
- Table D-7: Missions to Mars
- Table D-8: Martian Surface Distance and Velocity Theoretical Limits.
Carnegie Mellon Planetary Circumnavigation 1
1. Introduction
In the Introduction we define the concept of planetary circumnavigation and discuss the motivation for why it is operationally effective and why it is a likely result of sustained planetary exploration.
1.1 Circumnavigation
We define planetary circumnavigation as sustained navigation completely around a planet returning to the starting longitude. Such a feat is a remarkable accomplishment and one that has scientific, technological, economic, political and social impact. In 1522, after almost three years underway, Ferdinand Magellan’s expedition returned to Spain completing the first circumnavigation of our planet. After departing to seek a western route to the Spice Islands, the expedition found a passage around South America, crossed the Pacific ocean, found its destination, and eventually, after much hardship and loss, reached its home port in Spain. The expedition began with 5 ships and 237 crew and concluded with a single ship and 18 of the original crew; Magellan himself did not survive. Aside from the economic and social implications, including incontrovertible evidence that the earth is round, scientific discoveries resulted from direct and continuous observations in astronomy, oceanography, climatology, and geography. A new view of the world arrived, Figure 1-1. [Munich03] Among lessons that can be drawn from Magellan’s expedition are that wear and likely failure attest to the need for multiple vehicles, the necessary variation and unpredictability of the exact route of navigation, that there is need to make use of in situ resources for fuel and shelter and the challenges of optimizing multiple objectives. It
Introduction
Carnegie Mellon Planetary Circumnavigation 3
exploration that assimilates diverse information, develops regional understanding, and seeks broad knowledge of governing processes and principles. Sustainable rovers, which gather resources from the environment of the explored planet, have the potential to last tens of years, with attendant increases in science return. Planetary surface exploration evolves from focused point science, with flybys and landers, to discovery science, taken on by rovers. The next logical advancement takes exploration to planet-wide dimension, with long-duration rovers circumnavigating the body. Of course, the Earth cannot be circumnavigated by surface vehicle but this is not true of the other inner planetary bodies, Mercury, Venus, the Moon and Mars. Someday surface missions may conduct comprehensive global exploration.
1.2 Motivation
The aspirations of planetary science motivate global understanding of terrestrial bodies. Mission scenarios must be designed as distributed surface sampling missions for comprehensive understanding and long-term exploration of the planets. Many important scientific questions such as age dating, chemical and environmental analysis, and biomarker identification are only answerable by long-term, direct physical examination of the planet and cannot be addressed by planetary orbiters. Exploration culminates with sample return missions. An exploration strategy based on orbital science followed by extremely long-duration rover missions leads to global understanding. These rovers will be capable performing sophisticated in situ science throughout global traverses and/or planetary circumnavigation. In situ analysis eliminates a sample return trip, orbital sample transfer and decontamination requirements, thus reducing costs. However, in situ analysis requires miniaturization of instruments capable of the age dating and chemical analyses that would normally be carried out in a lab on Earth. The miniaturized instruments must also withstand the environmental conditions of the planet such as temperature and pressure. Sustained surface exploration is the science-driven objective but in many mission scenarios circumnavigation is a natural result or an operational advantage of a long- duration mission.Thus the motivation for sustained robotic exploration is both scientific and technical. 1.2.1 Scientific Scientific motivations flow from the necessity of in situ sensing and measurement to understand the past and present state of a planet and the processes by which it has evolved. Regional or global exploration is needed to map the elemental and chemical composition in fine detail and to distinguish between similar minerologies to assess quality and quantity of resources. Comparison of local composition and its formation requires visitation at many similar and dissimilar sites. Furthermore the boundaries between regions both in their interaction and in their extent and distribution are important to characterize. These regional comparisons help in understanding local and planetary formation. Tectonic,
Introduction
4 Planetary Circumnavigation Carnegie Mellon
magmatic, geologic, hydrologic and other processes are revealed in regional exploration. Age-dating requires material samples, either returned to a laboratory or someday analyzed in the field. To determine the chronology of formation and the distribution of material age-dating is the essential method. Understanding habitats that involve the combination of mineralogical, hydrological and environmental factors, often in a small site, require sensing at the resolution of potential lifeforms. Mapping the distribution and local variations of these possible habitats also requires direct observation. Biogenic analysis, detecting signs of life, is best conducted in situ as many organic indicators are short lived. To locate and map the distribution of life, for example on Mars, Venus, or the moons of Jupiter only surface exploration can provide the resolution and modalities required. 1.2.2 Technical Robotic exploration of planetary surfaces is restricted by the availability of power and implications of thermal conditioning needed to survive extremes of midday sun and overnight hibernation. With constant energy and moderate temperatures, surface exploration missions could last for months or years an successfully circumnavigate the planet. Other potential sources of power and propulsion are more specific to individual planets—temperature gradients on Mercury or atmospheric pressure on Venus—and will require further investigation of their potential for circumnavigation. With long local days, either due to spin-orbit coupling as with Mercury, long period of rotation or orbit as with Venus and the Moon, respectively, or axial inclination, sunlight may be feasible as the power source long-duration operations. Following the terminator, the region of twilight, which requires circumnavigation, also may offer thermal benefits. On Mercury and the Moon for example, the surface temperature transitions from extremes of hot and cold at the terminator. It may be possible to follow the advance of this band of moderate temperatures, perhaps even utilizing the temperature gradient between sunlight exposure and the cryogenic surface to advantage. The general concept for sustainable rovers is driven by the necessity to continuously gather power and resources from the environments of the explored planets throughout the lifetime of the mission. This will result in increased science return and smaller launch mass since the rover will gather the majority of its operating power during the mission. Like Magellan’s expedition that circumnavigated the Earth, similar missions to Mercury, Venus, the Moon, and Mars would generate global understanding. The
Introduction
6 Planetary Circumnavigation Carnegie Mellon
from large, diverse data sets, allow comparative analysis, and enable systemic understanding of planetary processes in a way currently only envisioned on Earth.
1.5 Summary
The concept we propose is revolutionary, the circumnavigation of the inner planets of our solar system. If achievable, the potential for missions of surface exploration is profound. Through this study we may discover: technological benefits to power for long-duration, long-distance operations and to thermal regulation between planetary extremes; scientific benefits in rich observations and comprehensive examination of vast regions, economic benefits to the typical short-duration mission profile and eventual commercial development of the planet; and social benefits from the spirt of great adventure and the familiarization of our neighborhood of planets. This study will examine the viability of the concept of planetary circumnavigation and identify the major issues for consideration.
1972 LRV 17 35.9 km, 12kph 3hrs 2 min Manned
1997 Sojourner 100m 90 days Supervisory Control
2003 MER 300m, 1cm/s 90 sols Supervisory Control
Figure 1-2: In three decades planetary rovers have miniaturized and increased in operational life and capability including autonomy and high-precision scientific sensing. Distances have not increased.
1973 Lunakhod 2 27 km 56 days Teleoperated
Carnegie Mellon Planetary Circumnavigation 7
2. Concept Definition
In Concept Definition the defining characteristics of sustained planetary exploration: sufficient power, thermal extremes and cycling, reliable mobility, and necessary autonomy are described.
2.1 Challenges of Circumnavigation
The surfaces of the inner planetary bodies are difficult places to explore. In the past, telerobotic missions have been the most plausible means of surface exploration due to temperature extremes, high radiation exposure and other factors that make human exploration dangerous and expensive. However, mission planners are faced with serious technological limitations. These missions of science and resource prospecting will call for extensive operations. Existing designs for robotic rovers all result in mission durations too short to achieve significant results. The duration and traverse distance achieved by a rover mission is generally restricted by available power, temperature- related failures or constrained rover mobility. The sustainable rover mission concept attempts to overcome these restrictions by imbuing a rover with the ability to make use of its environment. Without the ability to “live off the land”, a mission must deliver all needed resources to a planetary surface. Eventually, these resources will run out. Even solar-powered rovers will eventually fail as solar cells degrade or will become fouled with dust. Figure 2-1summarizes how prominent restrictions on rovers will be eliminated over time, as discussed in the following sections. Sustainable rovers and long-duration missions is one capability that will emerge. 2.1.1 Sufficient Power The key is to maximize production and minimize consumption. Conditions of several planetary bodies, most notably Mercury and the Moon, are favorable to the use of solar power. Missions that use solar power are less expensive than and currently politically favorable to those that use nuclear power sources.
Concept Definition
Carnegie Mellon Planetary Circumnavigation 9
power generated by nuclear sources would even reduce significantly. Potential solutions include replacement solar cells generated in situ or sent from Earth. 2.1.2 Thermal Extremes and Cycling Even with sufficient power, rovers on many planets will eventually succumb to mechanical stresses caused by thermal day-night cycles. These temperature swings are most severe on Mercury and the Moon, sometimes spanning as much as 500 o^ C. Even in less extreme cases such as Mars, seasonal swings can be significant when operating over several years. It is difficult to heat or cool all rover components; generally an electronics box with computing and sensors receives most protection. Parts outside are subject to ambient temperatures. If we take a sustainable approach that makes use of planetary characteristics, mitigating strategies can be implemented. For instance, temperatures are moderated at the Sun’s terminator, or boundary between day and night. Traveling with the terminator is more feasible on bodies with slower rotation and smaller circumference. To maintain safe operating temperatures, a terminator-tracking rover must therefore know its own location and understand the planet’s geometry, its atmosphere and the thermal conductivity of its soil. The sustainable approach leads to different strategies on different planets; a Venus mission may be lengthened by integrating a flying vehicle that understands the relationship between altitude and temperature. Any long duration missions will require an accurate understanding of thermal properties. Understanding these properties could be accomplished through preliminary orbital missions. Once accurate knowledge of the thermal properties of Mercury, Venus and the Moon is gained, requirements can also be made for high-temperature electronics, robust electromechanical components and innovative heating and cooling systems. 2.1.3 Reliable Mobility All inner planetary bodies present challenges to robotic mobility. Mercury, the Moon and Mars have terrains that are too rough for wheeled vehicles and distances too vast for legged machines. A sustainable approach to mobility is based on two premises. First, when possible, passive propulsion should be used that makes use of environmental and atmospheric energy. Examples of this range from a single inflated wheel blown by the Martian wind [Leger02] to a glider propelled by the temperature/pressure gradients of the Venusian atmosphere. These ideas mimic human transportation strategies taken throughout history such as following rivers downstream or sailing the open seas. A trade-off of passive propulsion is a lack of control. A wind-propelled rover lacks the control over its position seen in a traditional wheeled rover. A reconfigurable mobility system that switches between a mode of low-power, passive propulsion and a self- propelled model would solve this difficulty. 2.1.4 Necessary Autonomy There are several strong arguments that lead to rover autonomy requirements. First, the distances from Earth to the other inner planets lead to long communications delays. Other than on the Moon, these latencies are too long to support direct teleoperation.
Concept Definition
10 Planetary Circumnavigation Carnegie Mellon
Furthermore, communications links are infrequent as they require proper orbiter position. Today’s Mars missions consist of only one command cycle per day. Autonomy helps increase science return by enabling the rover to do more per command cycle. Communication windows become even more difficult if a rover is traveling on the far side of a planet. Finally, expense and duration of ground operations leads to autonomy for cost reduction. A second argument for autonomy is the need to respond at the pace of events. As rovers travel faster and in more varied terrain, dynamic events and sudden failures ar more likely. The rover must respond in real-time and this requires autonomy. A final argument for greater autonomy is rising mission operations cost. A rover that explores for years is unlikely to be supported by full round-the-clock operations and science teams functioning at the frantic pace of current missions. Even with the will and endurance, costs would be exorbitant. Circumnavigation missions call for rovers to perform several tasks in a highly autonomous fashion. 2.1.4.1 Navigation The problem of autonomous navigation is often broken into two subtasks: obstacle avoidance and path planning. Obstacle avoidance is tightly coupled to terrain perception and usually involves map building from stereo vision, structured light or laser range finding. These maps generally describe the region directly ahead of the rover. In addition to map building, some level of reactive response is often necessary as a contingency for failed detection of an obstacle. Traversability of regions is then evaluated with a variety of algorithms: those that calculate continuous “goodness” and certainty values over potential vehicle arc paths [Singh00] or those that use fuzzy sets and controllers to evaluate terrain [Seraji01]. Both approaches are being applied to planned Mars missions. Traversability analysis is often the focus of parameter tuning based on a priori knowledge of the terrain and rover. For instance, [Urmson02] describes the traversability analysis software onboard the Hyperion rover. The approach here was optimistic, assuming that unknown map cells are safe. The benefit is reliability in the face of inevitable noise, and therefore false obstacles, from stereo vision. Optimism is a reasonable assumption given that Hyperion operates in a landscape with sparse obstacles and rolling terrain and used a laser rangefinder as a “virtual bumper” obstacle detector—a last line of defense should stereo vision fail. Less optimistic approaches seem intuitive for costly and risky planetary missions, except in cases of extreme vehicle terrainability like inflatable rover concepts [Jones01]. Obstacle avoidance alone would allow a rover to wander, aimlessly but safely over terrain. Therefore higher level planning is required to successfully reach an operator- selected waypoint. Prominent planning approaches include the D* algorithm [Stentz94], [Stentz95], which was most recently used on the Hyperion rover as it accomplished multiple 24-hour circumnavigational paths in the Canadian Arctic [Wettergreen02]. This version of D* calculated path cost as a combination of the cost of locally-planned arc paths (from the approach described above) and the cost from the end of the arc to a goal region. D* enables efficient re-planning when new terrain information is gained during the rover’s travels.