Download Planning in Artificial Intelligence: Sequence of Actions to Achieve a Goal and more Lecture notes Artificial Intelligence in PDF only on Docsity!
Planning
AI Planning
- The task of coming up with a sequence of actions that will achieve a goal is called planning.
- Until recently, AI planning was essentially a theoretical endeavor: It‘s now becoming useful in industrial applications
- Example application areas
- design & manufacturing
- military operations & logistics
- games
- space exploration -Proof Planning in Mathematics
- Speech and Dialog Planning
Notions
- Plan sequence of (actions) transforming the initial state into a final state
- Operators representation of actions Room 2
- Planner algorithm that generates a plan from a (partial) description of initial and final state and from a specification of operators
Go to the basket
Classical Planning Environments
- Fully observable
- Deterministic outcome
- Finite steps
- Static (change happens only due to action)
- Discrete in time, action, objects and effects
The classical Planning Framework
Example: Travel Scenario
Two phases: Plan Generation and Plan Execution
Given: Initial state, Goal State and a Set of Operators
Task: Find planning operators which transform initial state into goal state
Describe states in a formal language like Predicate Logic
- A Plan is a sequence of operators that transforms the initial state into the goal state
- Initial State- At Home
- Goal State- Get milk, banana and a cordless drill.
- Depending on the set of actions… branching factor could be huge.
- Heuristic functions can guide the search of states, but cannot eliminate states.
- Problems with a search agent
Too many actions and too many states to
consider
Heuristic functions can only choose among
states and can’t eliminate actions from
consideration; so which action should be
taken?
Agent is forced to consider actions starting
from the initial state.
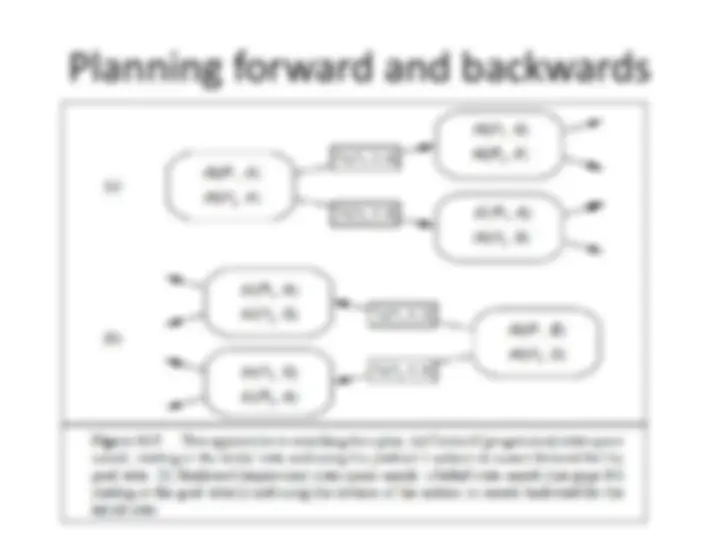
From problem solving to planning
- They are different in representing goals, states, and actions, and in ways of constructing action sequences.
- For a problem-solving agent,
Actions - generate successor state descriptions
State representations for successor generation, heuristic eval function, and goal testing
Goals used in the goal test and the heuristic function
Classical planning environments
- Fully observable
- Deterministic outcome
- Finite steps
- Static (change happens only due to action)
- Discrete in time, action, objects, and effects
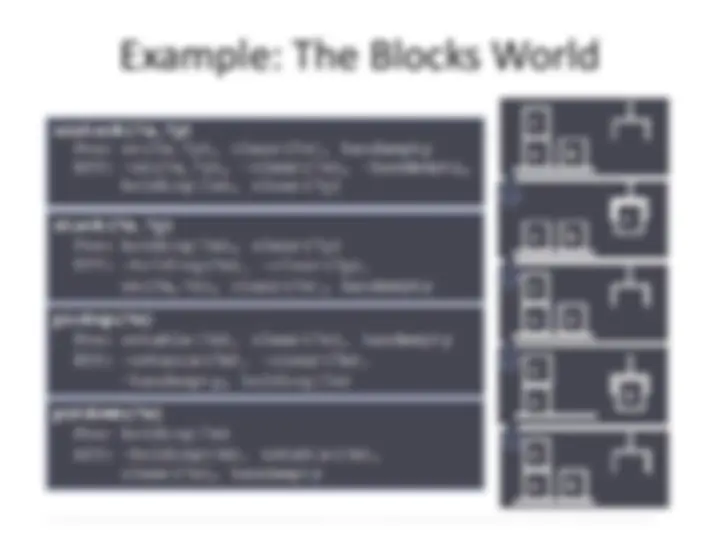
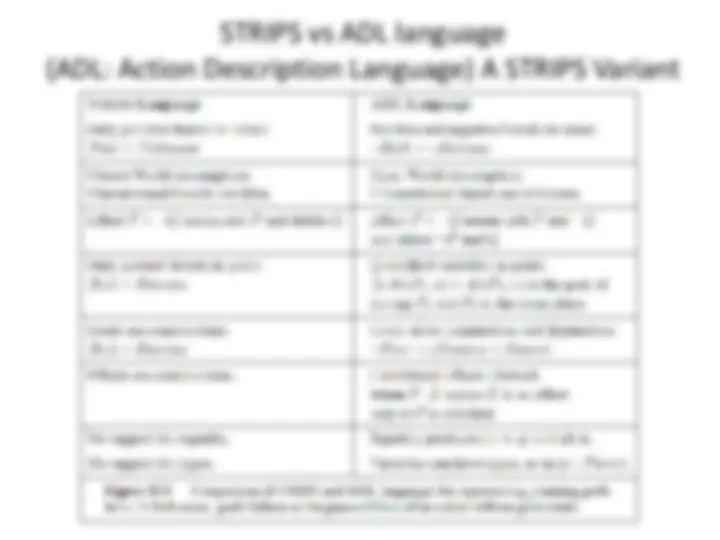
STRIPS
- Before starting STRIPS….How is this different from problem-solving via search?
- states, goals, and actions use representations in some formal language we can look inside actions: - with search, actions defined only by state transitions - with planning, describe actions by: preconditions: what must be true before an action can be performed effects (postconditions): what must be true (what has changed) after action is performed - this allows planning systems to reason about interaction between different actions
- we can consider actions in any order - with search, only consider continuous sequences of actions from initial state to goal - with planning: we can add steps incrementally, regardless of their final position in the sequence
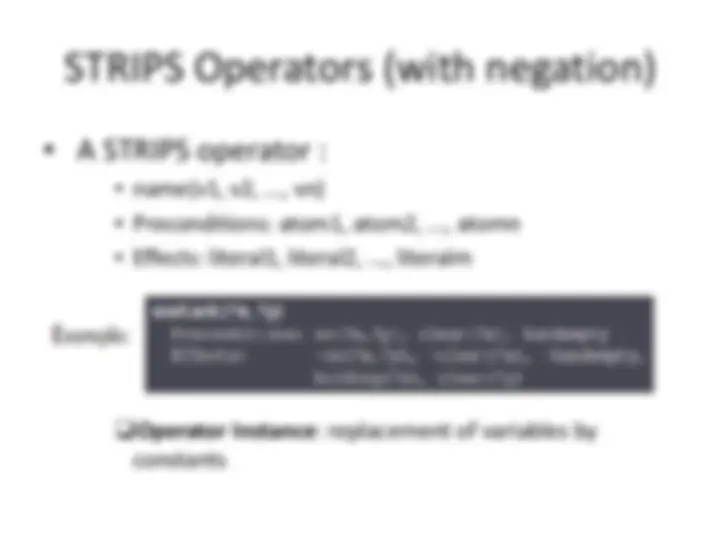
STRIPS
- STRIPS: Stanford Research
Institute Planning System (1970)
(essentially propositional logic) used in most classical planners
- First major planning system -
planner for the Shakey robot
Basic Representation
- STRIPS language for efficient planning
States are conjunctions of function-free ground literals At(P1,JFK)^At(P2,SFO)^Plane(P1)^Plane(P2)^..
Goals are conjunctions of literals, can contain variables At(C1,JFK)^At(C2,SFO)
Implicit representations of states in planning - only changes are tracked.
Actions in STRIPS have three components: action, precondition, and effect
STRIPS (2)
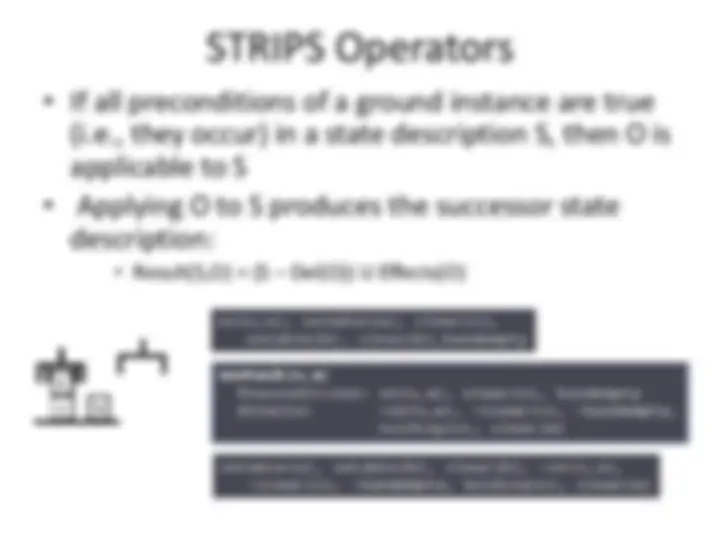
- An action is applicable in any state that satisfies the precondition; else the action has no effect
- An example about applicable application At(P1,JFK)^At(P2,SFO)^Plane(P1)^Plane(P2)^Airport(JFK) ^Airport(SFO), Is the action Fly applicable? After flying, we have At(P1,SFO)^At(P2,SFO)^Plane(P1)^Plane(P2)^Airport(JFK) ^Airport(SFO), Is Fly applicable?
- STRIPS assumption: Every literal not mentioned in the effect remains unchanged The Frame problem is avoided
- The solution for a planning problem is a sequence of actions, starting in the initial state, results in a goal state
Another Example: Representing
States of the World
- State: a consistent assignment of TRUE or
FALSE to every literal in the universe
- State description:- a set of ground literals that
are all taken to be TRUE
The negation of these literals are taken to be false Truth values of other ground literals are unknown
- Note: in standard STRIPS, a state is restricted
to contain only positive literals