Download Polycentric Hinge - Computer-Aided Analysis of Machine Dynamics - Lecture Notes and more Study notes Computer-Aided Analysis of Machine Dynamics in PDF only on Docsity!
POLYCENTRIC HINGE - SKELETAL DIAGRAM
POLYCENTRIC HINGE - VECTORS
Vector Position of Length (mm)
Angle (deg) 1 H wrt A 21.67 constant 0.00 constant 2 B wrt A 26.69 constant 181.61 var 3 C wrt B 26.00 constant 36.95 var 4 D wrt E 14.00 constant 99.38 driver 5 E wrt F 17.83 constant -15.87 var 6 F wrt H 22.47 constant 146.31 (^) 9 - 5.33 7 G wrt H 22.03 var 171.56 var 8 G wrt A 3.23 constant 92.21 (^) 2 - 89.40 9 C wrt H 31.33 constant 151.64 var 10 D wrt C 24.62 constant 15.36 (^) 3 - 21.59
R 2 R 3 R 9 R 1 0
R 2 R 3 R 10 R 4 R 5 R 6 R 1 0
R 8 R 7 R 1 0
A
B
C
D
E
H
F
G
A
B
C
D
E
H
F
G
2
6
3 4 5
8
7
(^1 )
R (^2)
R (^7)
R (^6)
R (^5)
R (^4)
R (^3)
R (^10)
R (^9)
R (^8) R (^1)
Sewing Machine
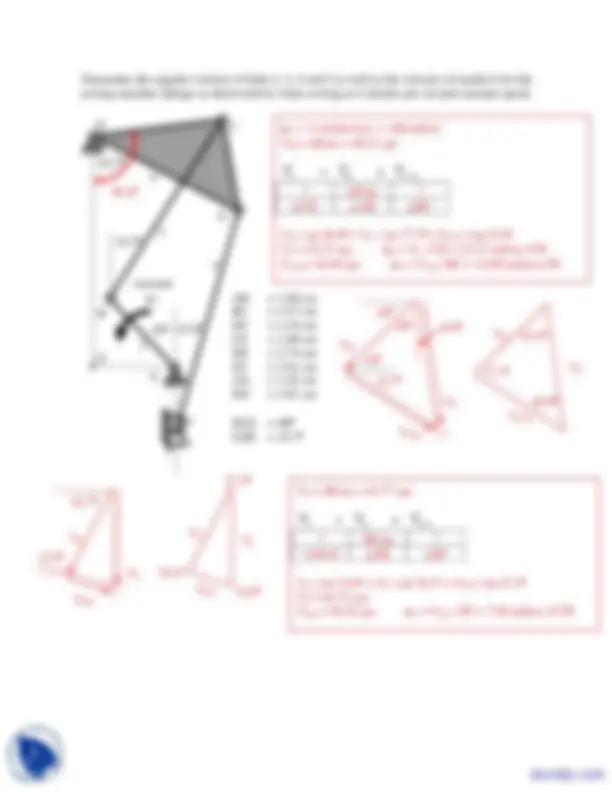
Determine angles , and as well as distance s for this sewing machine linkage at the position shown below.
A
D
B
C
E
G
F
s
A
D
G
AD^2 = AG^2 + DG^2
AD = 4.066 cm
tan GDA = AG / DG GDA = 20.44
A
D
B
e
D
C
B
e
G
e 2 = AB^2 + AD^2 - 2 (AB) (AD) cos 24.56 e = 2.694 cm sin / AB = sin 24.56 / e = 14.29
e 2 = BC^2 + CD^2 - 2 (BC) (CD) cos = 48.94 sin / BC = sin / e = 87.77 or 92.23 ??? check which one BC^2 = e 2 + CD^2 + - 2 e (CD) cos = 92.23
GDA - + = CDG = + CDE = 62.65
+ CDE + + = 180 = 32.68
DE sin = AG + EF sin = 15.43 s + DG = DE cos + EF cos s = 1.12 cm
A
D
G
s
E
F
AB = 1.60 cm BC = 3.57 cm DC = 2.24 cm CE = 1.60 cm DE = 2.74 cm EF = 3.81 cm AG = 1.42 cm DG = 3.81 cm
DCE = 90
CDE = 35.7
Determine the angular velocity of links 2, 3, 4 and 5 as well as the velocity of needle 6 for the sewing machine linkage as shown below when sewing at 4 stitches per second constant speed.
2 = 4 stitches/sec = +8 rad/sec VB = AB 2 = 40.21 cps
VC VB VC/B
? AB 2?
CD AB BC
VB / sin 48.9 = VC / sin 77.7 = VC/B / sin 53.4 VC = 52.31 cps 4 = VC / CD = 23.27 rad/sec CW VC/B = 42.84 cps 3 = VC/B / BC = 12.00 rad/sec CW
VB
VC
VC/B
VB
VC
VC/B
VE = DE 4 = 63.77 cps
VF VE VF/E
? DE 4?
vertical (^) DE EF
VE / sin 74.6 = VF / sin 78.1 = VF/E / sin 27.3 VF = 64.72 cps VF/E = 30.34 cps 5 = VF/E / EF = 7.96 rad/sec CCW
VE
VF
VF/E
VE
VF
VF/E
45 ^ 15.4
A
D
B
C
E
G
F
AB = 1.60 cm BC = 3.57 cm DC = 2.24 cm CE = 1.60 cm DE = 2.74 cm EF = 3.81 cm AG = 1.42 cm DG = 3.81 cm
DCE = 90
CDE = 35.7
constant 2
Determine the angular velocity of links 2, 3, 4 and 5 as well as the velocity of needle 6 for the sewing machine linkage as shown below when sewing at 4 stitches per second constant speed.
R 2
B
C
R 1 R 3
R 4
A
D
2 *^ = 4 = -23.27 rad/sec r ^ [cm] (^) ^ [deg] 1 4.93 270 2 2.74 332. 3 3.81 254. 4 1.42 0
3 *^ = - r 2 *^ 2 *^ cos( 2 *^ - 1 *^ ) / r 3 *^ cos( 3 *^ - 1 *) = + 7.96 rad/s
r 1
2
3 *) / cos( 3
1 *) = + 64.71cps
5 = 3 *^ = 7.96 rad/sec CCW VF = 64.71 cps down
2 = +8 rad/sec r [cm] (^) [deg] 1 4.07 110. 2 1.60 135. 3 3.57 57. 4 2.24 8.
3 = -r 2 2 sin( 2 - 4 ) / r 3 sin( 3 - 4 ) = -12.00 rad/s 4 = -r 2 2 sin( 2 - 3 ) / r 4 sin( 3 - 4 ) = -23.27 rad/s
A
D
B
C
E
G
F
AB = 1.60 cm BC = 3.57 cm DC = 2.24 cm CE = 1.60 cm DE = 2.74 cm EF = 3.81 cm AG = 1.42 cm DG = 3.81 cm
DCE = 90
CDE = 35.7
constant 2
R 2 *
E
F
R 1 *
R 3 *
R 4 *
D
G
2 2 2
2 2 2
2 2 2
2 2 2
6
5
4
3
3 3 8 8 5 5
3 3 8 8 5 5
3 3 4 4
3 3 4 4
r cos
r sin
r cos
r sin
rcos r cos r cos (^1) r
r sin r sin r sin 0
rcos r cos 0 0
r sin r sin 0 0
- 929 0. 234 1. (^0121) r
6
5
4
3
using MATLAB
07 cm/ sec
96 rad/sec
27 rad/sec
00 rad/sec
r 6
5
4
3
Determine the angular acceleration of links 2, 3, 4 and 5 as well as the acceleration of needle 6 for the sewing machine linkage as shown below when sewing at 4 stitches per second constant speed.
R 2
B
C
R 1 R 3
R 4
A
D
2 = +8 rad/sec 2 = 0 angular velocities from velocity solution r [cm] (^) [deg] (^) ^ [rad/sec] r^2 [cpss] ^ [rad/s/s] r [cpss]
1 4.07 110. 2 1.60 135.0 +25.13 +1010.6 0 0 3 3.57 57.3 -12.00 +514.1? 4 2.24 8.4 -23.27 +1212.9?
4
2 3 4 4
2 2 3 3
2 2 2 2 2 2
4
2 3 4 4
2 2 3 3
2 2 2 2 2 2 4
3 3 3 4 4
3 3 4 4 r cos r sin r sin r sin
r sin r cos r cos r cos r cos r cos
r sin r sin
0 cpss
8 cpss
929 2. 216
4
3
4 rad/s/ s
3 rad/s/s
0
4
3
closed form ^3 = ( - r 2 ^2 sin( 2 - 4 ) - r (^2) 2 ^2 cos( 2 - 4 ) - r 3 2 ^3 cos( 3 - 4 ) + r 4 2 ^4 ) / r 3 sin( 3 - 4 ) = 549.3 rad/s/s ^4 = ( - r 2 ^2 sin( 2 - 3 ) - r (^2) 2 ^2 cos( 2 - 3 ) - r 3 2 ^3 + r (^4) 2 ^4 cos( 4 - 3 )) / r 4 sin( 3 - 4 ) = 40.4 rad/s/s
A
D
B
C
E
G
F
AB = 1.60 cm BC = 3.57 cm DC = 2.24 cm CE = 1.60 cm DE = 2.74 cm EF = 3.81 cm AG = 1.42 cm DG = 3.81 cm
DCE = 90
CDE = 35.7
constant 2