



Newton’s Divided Difference
Polynomial Method of
Interpolation
Docsity.com









Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Interpolation and how to use newton's divided difference method for finding the value of a function at a given point using linear and quadratic interpolants. It includes examples and formulas.
Typology: Slides
1 / 22

This page cannot be seen from the preview
Don't miss anything!
Newton’s Divided Difference Method
Linear interpolation: Given pass a linear
interpolant through the data
where
( x 0 , y 0 ), ( x 1 , y 1 ),
f 1 (^) ( x ) b 0 b 1 ( x x 0 )
b 0 (^) f ( x 0 )
1 0
1 0 1
( ) ( )
x x
f x f x b
The upward velocity of a rocket is given as a function of time
in Table 1. Find the velocity at t=16 seconds using the Newton
Divided Difference method for linear interpolation.
Table. Velocity as a
function of time
Figure. Velocity vs. time data
for the rocket example
t (s) v ( t )(m/s)
(^35010 12 14 16 18 20 22 )
400
450
500
517.35^550
y (^) s
f range( ) f x (^) de sire d
x (^) s 0 10 x (^) s rangex (^) de sire d x (^) s 1 10 v ( t ) b 0 b 1 ( t t 0 )
362. 78 30. 914 ( t 15 ), 15 t 20
At t 16
v ( 16 ) 362. 78 30. 914 ( 16 15 )
393. 69 m/s
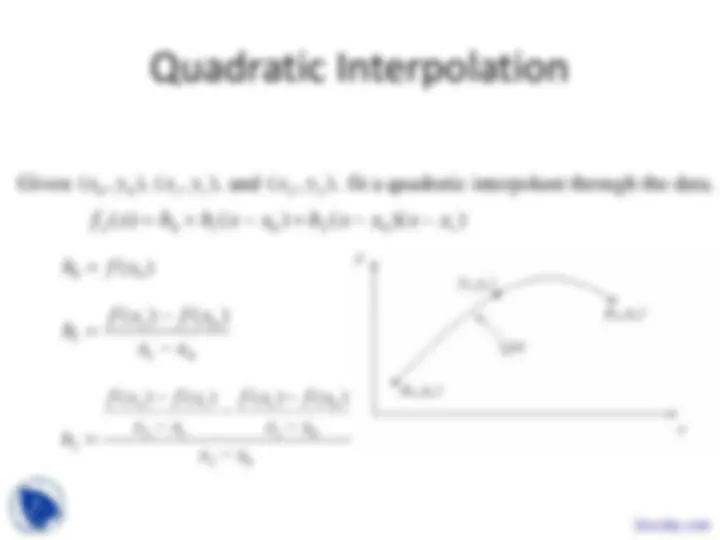
f (^) 2 ( x ) b 0 b 1 ( x x 0 ) b 2 ( x x 0 )( x x 1 )
1 0
1 0 1
( ) ( )
x x
f x f x b
2 0
1 0
1 0
2 1
2 1
2
x x
x x
f x f x
x x
f x f x
b
(^20010 12 14 16 18 )
250
300
350
400
450
500
517.35^550
y (^) s
f range( ) f x (^) de sire d
10 x (^) s rangex (^) de sire d 20
t 0 10 , v ( t 0 ) 227. 04
t 1 15 , v ( t 1 ) 362. 78
t 2 20 , v ( t 2 ) 517. 35
Quadratic Interpolation (contd)
b 0 (^) v ( t 0 )
227. 04
1 0
1 0 1
t t
v t v t b
27. 148
2 0
1 0
1 0
2 1
2 1
2
t t
t t
v t v t
t t
v t v t
b
0. 37660
2 0 1 0 2 0 1
f (^) 2 ( x ) f [ x 0 ] f [ x 1 , x 0 ]( x x 0 ) f [ x 2 , x 1 , x 0 ]( x x 0 )( x x 1 )
b 0 (^) f [ x 0 ] f ( x 0 )
1 0
1 0 1 1 0
x x
f x f x b f x x
2 0
1 0
1 0
2 1
2 1
2 0
2 1 1 0 2 2 1 0
x x
x x
f x f x
x x
f x f x
x x
f x x f x x b f x x x
fn ( x ) b 0 b 1 ( x x 0 ).... bn ( x x 0 )( x x 1 )...( x xn 1 )
where
b 0 (^) f [ x 0 ]
b 1 (^) f [ x 1 , x 0 ]
b 2 (^) f [ x 2 , x 1 , x 0 ]
b (^) n 1 f [ xn 1 , xn 2 ,...., x 0 ]
b (^) n f [ xn , xn 1 ,...., x 0 ]
The upward velocity of a rocket is given as a function of time
in Table 1. Find the velocity at t=16 seconds using the Newton
Divided Difference method for cubic interpolation.
Table. Velocity as a
function of time
Figure. Velocity vs. time data
for the rocket example
t (s) v ( t )(m/s)
The velocity profile is chosen as
v ( t ) b 0 b 1 ( t t 0 ) b 2 ( t t 0 )( t t 1 ) b 3 ( t t 0 )( t t 1 )( t t 2 )
we need to choose four data points that are closest to t ^16
t 0 10 , v ( t 0 ) 227. 04
t 1 15 , v ( t 1 ) 362. 78
t 2 20 , v ( t 2 ) 517. 35
t 3 22. 5 , v ( t 3 ) 602. 97
The values of the constants are found as:
b 0 = 227.04; b 1 = 27.148; b 2 = 0.37660; b 3 = 5.4347×
− 3
Hence
v ( t ) b 0 b 1 ( t t 0 ) b 2 ( t t 0 )( t t 1 ) b 3 ( t t 0 )( t t 1 )( t t 2 )
4347 * 10 ( 10 )( 15 )( 20 )
04 27. 148 ( 10 ) 0. 37660 ( 10 )( 15 )
3
t t t
t t t
At t 16 ,
( 16 ) 227. 04 27. 148 ( 16 10 ) 0. 37660 ( 16 10 )( 16 15 )
3
v
392. 06 m/s
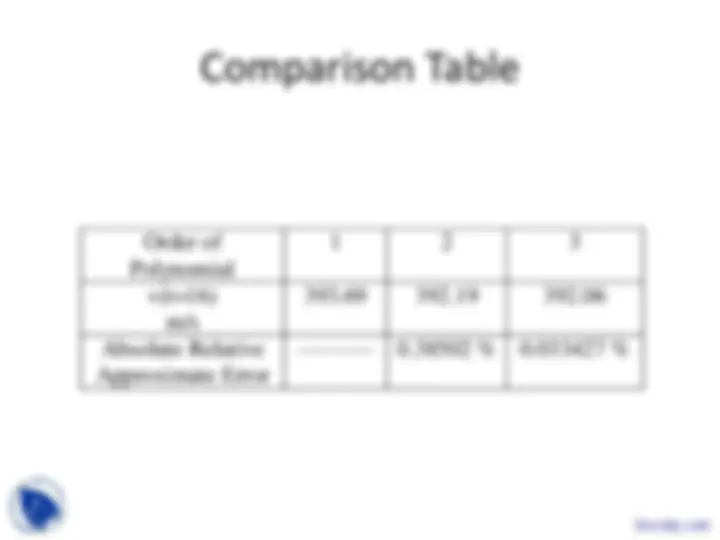
The absolute relative approximate error a obtained is
a x 100
Order of
Polynomial
1 2 3
v(t=16)
m/s
393.69 392.19 392.
Absolute Relative
Approximate Error
---------- 0.38502 % 0.033427 %