


Georgia Institute of Technology
Spring 2008
Preference Modeling and
Optimization
ME6105 Homework 5
Jonathan Bankston, Yavuz Mentes, Alex Ruderman




















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The homework 5 solution for the preference modeling and optimization course (me6105) at georgia tech. The students, jonathan bankston, yavuz mentes, and alex ruderman, present their approach to developing a deeper understanding of decision making in design, modeling preferences in a utility function, exploring a design space, and optimizing design problems. They use multi-attribute utility theory (maut) and a space filling full-factorial design of experiments (doe) to analyze their design problem and find the optimal design alternative.
Typology: Assignments
1 / 35

This page cannot be seen from the preview
Don't miss anything!
ME6105 Homework 5
To develop a deeper understanding of decision making in design
To gain experience modeling preferences in a utility function
To explore a design space and model an optimization problem
To solve design problems computationally and gain a deeper understanding of the computational trade offs.
To develop a deeper understanding of how uncertainty plays a role in design
In HW2, you have identified a particular system for which you would like to solve a design problem. You modeled a
physics-based relationship between design alternatives and design objectives in HW3, and explored the influence of
uncertainty on the system performance in HW4.
You are now ready to solve the entire design problem formulated in HW1. In this final assignment, you will use your
Modelica model and combine it with models for uncertainty and preferences to formulate a complete decision problem.
You will do so in two ways: first, deterministically, to establish a base-line solution, and secondly, considering
uncertainty, i.e., solving the same problem by maximizing the expected utility.
Both the deterministic decision problem and the decision problem under uncertainty will be modeled and solved in the
software ModelCenter by Phoenix Integration.
You are asked to write a report on your simulation-based design study. I suggest that you address each of the topics below
in a separate section of your report. Each section should describe your solution to that particular part of the design study,
list the important results (if appropriate), and provide an interpretation of the results.
Important Note: I’m not looking for a 200 page novel... Also, do not hesitate to include screenshots -- a picture is worth
a thousand words. I should be able to grade your assignment based solely on the information in your report without
having to open/run any of your models.
Figure 1.2: Means-Objectives Network for Automobile Suspension
Using the relations from the modified objectives networks above, we made modifications to our original influence diagram, which is shown below.
Minimize Damping Response Time
Minimize Settling Time
Maximize Power Capability of LMES
Maximize Energy Recovered
Maximize Ride Comfort
Maximize Customer Satisfaction
Maximize Safety
Maximize Roll Stability
Larger Stator Coil
Thicker Wire More Turns of the Wire
Maximize number of magnets
Minimize Vertical Acceleration
Minimize Cost
Minimize Cost of PGSA
Figure 1.3: Influence Diagram for Suspension Design
Strength of Magnets
Cross-Sectional Area of wire
coil wire
Speed of Car
Spring Stiffness
Capability
Force from Road
Spring Constant
Force to PGSA
Road Condition
Force to Spring
Force to Chassis
Energy Generated
Cost
Comfortable Ride
Vertical Acceleration of Chassis
Mass of Car
Figure 1.5: Existing Dymola Model of the Suspension System
Figure 1. 6 : Dymola model of the entire car system.
Our objectives are to maximize the ride comfort, maximize electrical energy recovered, and minimize the overall cost of the system. The ride comfort is characterized by the vertical acceleration of the car where lower acceleration means a more comfortable ride. The recovered energy from the PGSA is the amount of energy contributed to the electrical system of the car. We measured AC power from the terminals of the PGSA. The cost is a relative measurement based on researched costs of the components of the PGSA (i.e. the length of the copper wire, the cross-sectional area of the copper wire, and the magnetic field for the magnets). These three objectives are obviously dependent upon one another. Therefore, the attributes were adjusted to find the optimal system.
In order to express your preference with respect to a given design alternative, you need to develop a utility function that captures the tradeoffs that exist for the attributes of the design alternative. As discussed in class, go through the elicitation process to determine your utility function. This process becomes quite tedious for more than 4 attributes -- limit yourself to 4.
To document the elicitation process, briefly describe in your report the elicitation questions that you asked yourself, the fitting of the individual utility functions, the computation of the coefficients in the multi-linear utility function.
Briefly describe how the coefficients in the multi-linear utility function are computed from elicitation questions. In other words, based on your example, explain the computations that take place in the MAUT spreadsheet.
Interpretation: Provide an interpretation of each of the single-attribute utility functions: Are you "risk averse," "risk seeking" or both? Explain why? Also provide an interpretation of the coefficients in your multi-attribute utility function.
As described above, the attributes of our system are the vertical acceleration of the car (ride comfort), the energy in Joules generated by the PGSA, and the cost in dollars of the PGSA. In order to come up with the individual utility functions for each of these attributes we used the spline spreadsheet provided by Chris. The elicitation question that we chose to ask ourselves is shown below.
“At what X would you be indifferent to accepting this X value or taking a 50/50 chance between X(low) and X(high)?”
In the above elicitation question, X(low) represents the changing value of our attribute corresponding to a utility value of zero and X(high) represents the changing value corresponding to a utility of 1. The values of X correspond to the utility value of 0.5 for the different X(low) and X(high) values. In order to change the values of X(low) and X(high), we made the indifferent X value equal to either X(low) for utilities 0.5-1 and X(high) for utilities 0-0.5.
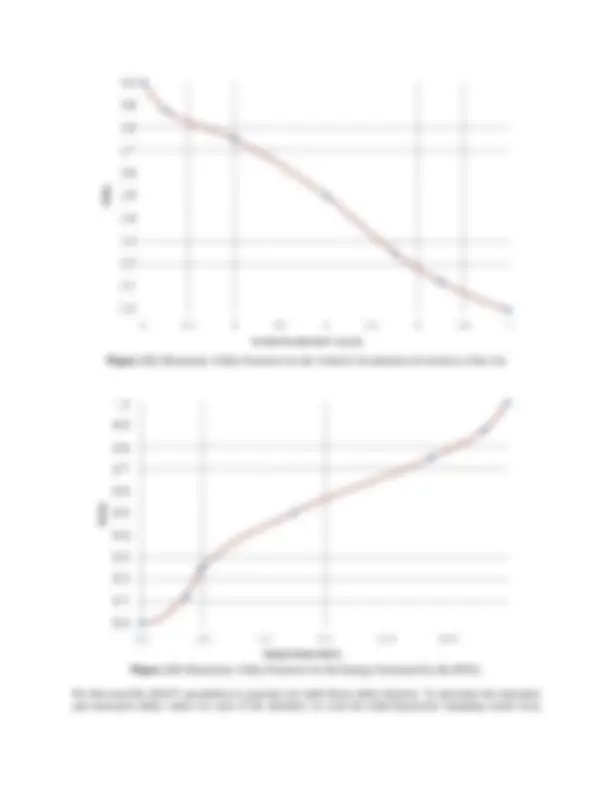
Figure 2.2: Monotonic Utility Function for the Vertical Acceleration (Comfort) of the Car
Figure 2.3: Monotonic Utility Function for the Energy Generated by the PGSA
We then used the MAUT spreadsheet to generate our multi-linear utility function. To determine the minimum and maximum utility values for each of the attributes we used the Latin-Hypercube Sampling results from
Homework 4. Using these results helped us estimate acceptable ranges of values for these attributes. Since the values in the LHS were derived from our input variables that we are confident with, these minimum and maximum values represent a satisfying range that should not restrict any useful data. We want to use a wide range of values in order to better gauge the possibilities of our system. From the notes on our graded Homework 4, we realized that the upper bound of our magnetic field strength distribution values was too large. We performed the LHS again with a more reasonable range of 0.5 to 2 Tesla for the magnetic field. The results from the LHS and the elicitations were combined to come up with the multi-attribute utility function. These process and the results are shown below.
Table 2.1: MAUT Spreadsheet Elicitation
Table 2.1 shows the elicitation section of the MAUT spreadsheet (for three variables) where we elicited our preferences to calculate the coefficients of our multi-linear utility function. The spreadsheet uses reference points and elicitation points to determine relationships between the utilities of all three attributes. Our first step was to develop the list of reference points. A reference point is described by the set of values for each attribute at that point as well as the corresponding utilities for those values. We retrieved the utility and value combinations from the monotonic utility functions.
Then, we developed the corresponding list of elicitation points. For each question, we defined two of the attributes by selecting utilities that were sufficiently far from the reference point. We then found values for those utilities using the monotonic utility functions. The third attribute was defined by answering the elicitation question:
“Keeping in mind the range of each attribute and the available PGSA given by the reference point, what value must the attribute in question be for you to accept this design given the predefined values of the other attributes?”
As shown in Table 2.1, we began by repeating the same reference point for sets of three elicitation questions. This way a different attribute was elicited for each reference point using varied predefined values. If the utility residue or inv(ATA) intermediate results were unacceptable, we adjusted these utilities and elicited the attribute again.
Elicitation Elicitation Point Reference Point Utility Attribute #1 Attribute #2 Attribute #3 Attribute #1 Attribute #2 Attribute #3 Residue Question Value Utility Value Utility Value Utility Value Utility Value Utility Value Utility (^1) 1.75 0.57 1300 0.75 29.7 0.2 2 0.5 850 0.5 26.5 0.5 0. 2 0.25 0.875 400 0.017 24.5 0.875 2 0.5 850 0.5 26.5 0.5 0. 3 3.25 0.125 1475 0.875 29 0.25 2 0.5 850 0.5 26.5 0.5 - 0. 4 2.5 0.33 1173 0.675 24.5 0.875 3.25 0.125 1475 0.875 26.5 0.5 0. 5 2.75 0.25 (^) 1200 0.69 25 0.75 3.25 0.125 1475 0.875 26.5 0.5 0. 6 2 0.5 355 0 24.5 0.875 3.25 0.125 1475 0.875 26.5 0.5 - 0. 7 3.125 0.16 1550 1 34 0 1 0.75 500 0.125 31 0.125 0. 8 0.25 0.875 1475 0.875 33.5 0.02 1 0.75 500 0.125 31 0.125 - 0. (^9) 1.5 0.64 550 0.25 25 0.75 2.75 0.25 1550 1 24 1 - 0. 10 2 0.5 900 0.53 29 0.25 2.75 0.25 355 0 24 1 - 0. 11 0.25 0.875 1300 0.75 30 0.18 2.75 0.25 1550 1 24 1 0.
Explore this design space by using the appropriate exploration tools (e.g., a space-filling DOE) -- the goal is to narrow down the design space that you will consider for optimization, e.g., to avoid getting stuck in local minima. These parameter studies will also serve as a validation of your behavior models and utility functions (e.g., it is not uncommon that a bug in your model surfaces when using parameter values that are different from the ones you started with when building the model).
For instance, you may do a full factorial exploration of your design space; among the alternatives evaluated in this full factorial design, find the design alternative that gives you the largest (deterministic) utility. This point could serve as a starting point for further optimization.
It is also important to develop an idea of how many local minima your utility surface has, whether it is smooth, etc. so that you can decide on the appropriate optimization algorithm in the next step.
Interpretation: Describe briefly the design exploration steps you performed. What did you learn about your design problem?
We created a ModelCenter model to explore the design space of our system based on our design variables. As we show in Figure 3.1, the exploration model consists of two different assemblies: a behavioral model and a utility model. The behavioral model represents the behavior of our suspension system using the Dymola model. The design objectives were linked to the corresponding excel spreadsheet for the monotonic utility functions. The spreadsheet accepts values for vertical acceleration, generated energy, or PGSA cost and outputs the utility based on the spline curve equation. These individual utility outputs were substituted into the multi-attribute utility function from Task 2 to calculate the total utility of the given set of input design variables.
Figure 3. 1 : (a) Exploration Model, (b) Behavioral model, (c) Utility Model
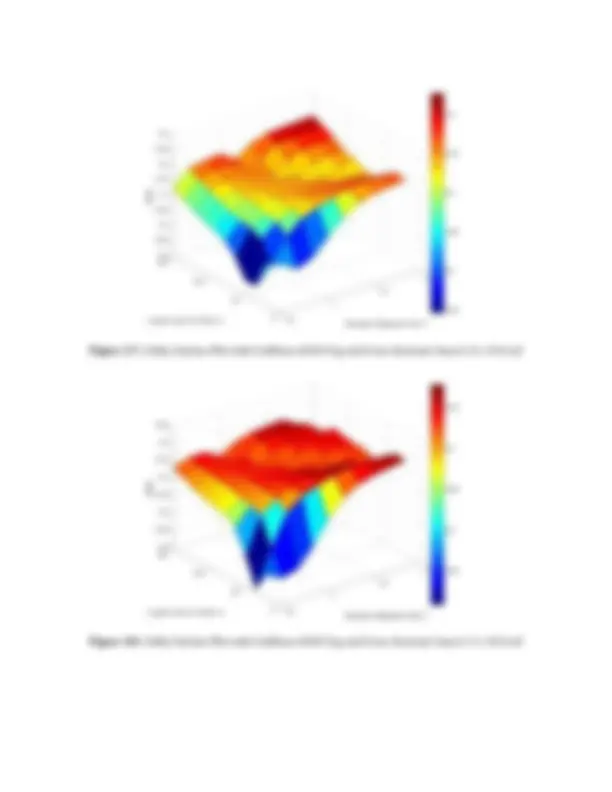
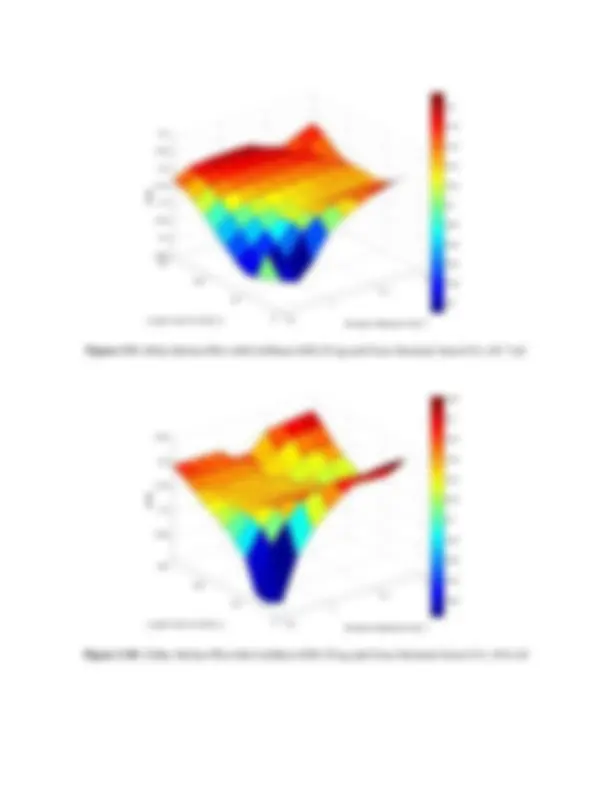
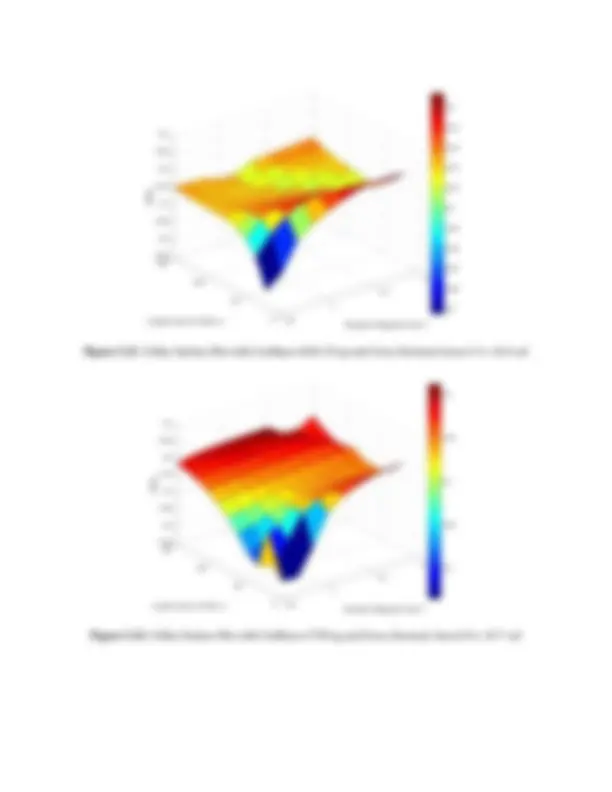
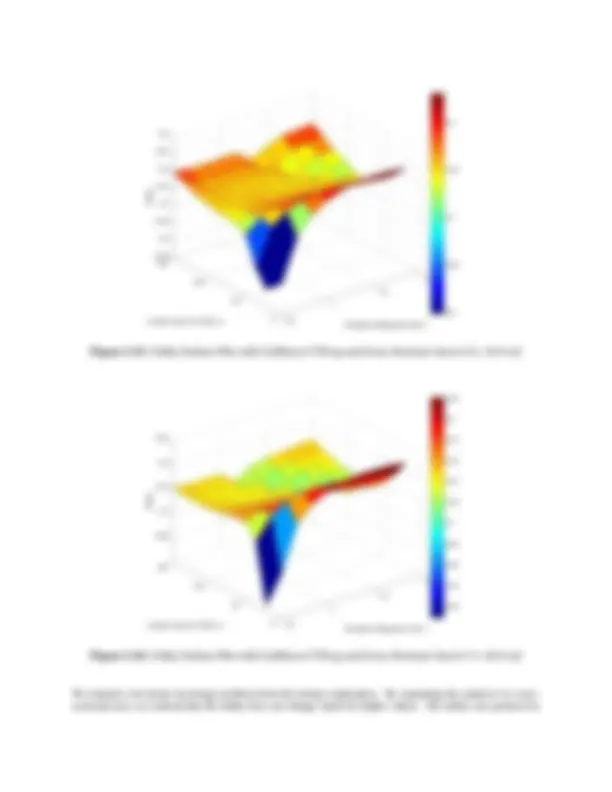
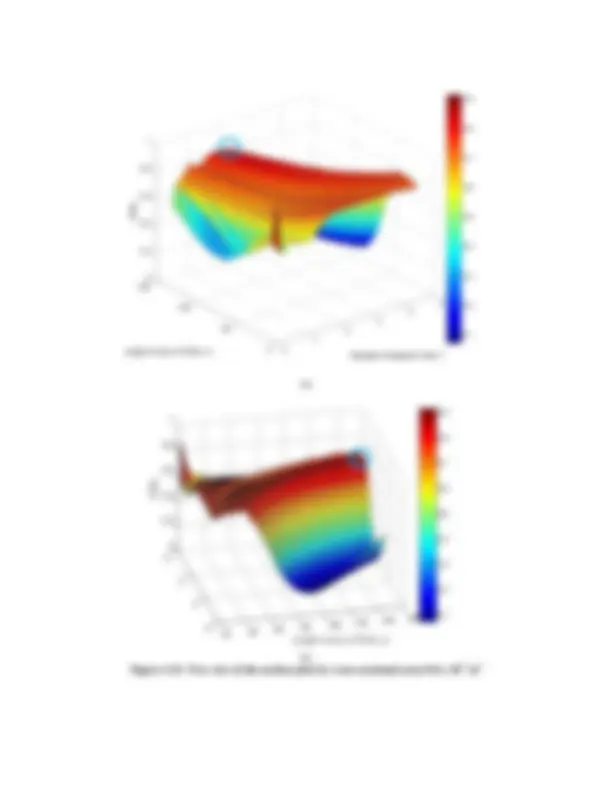
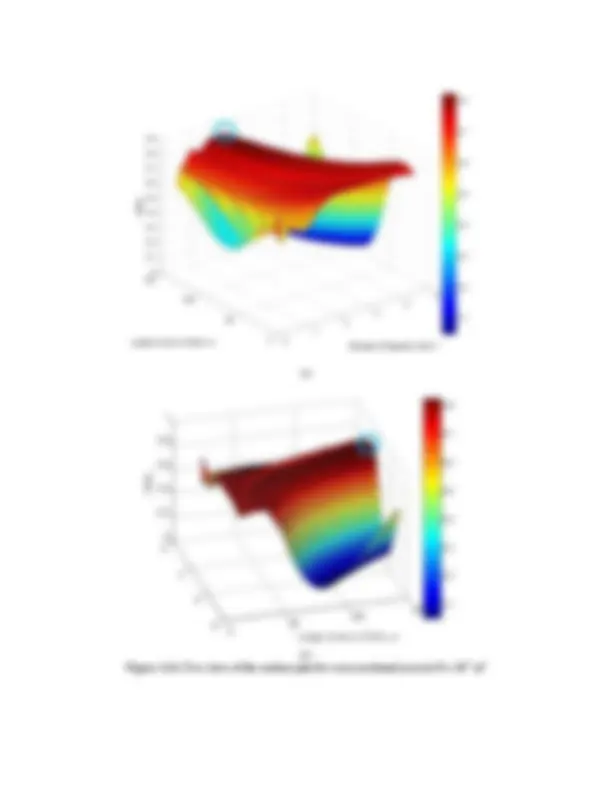
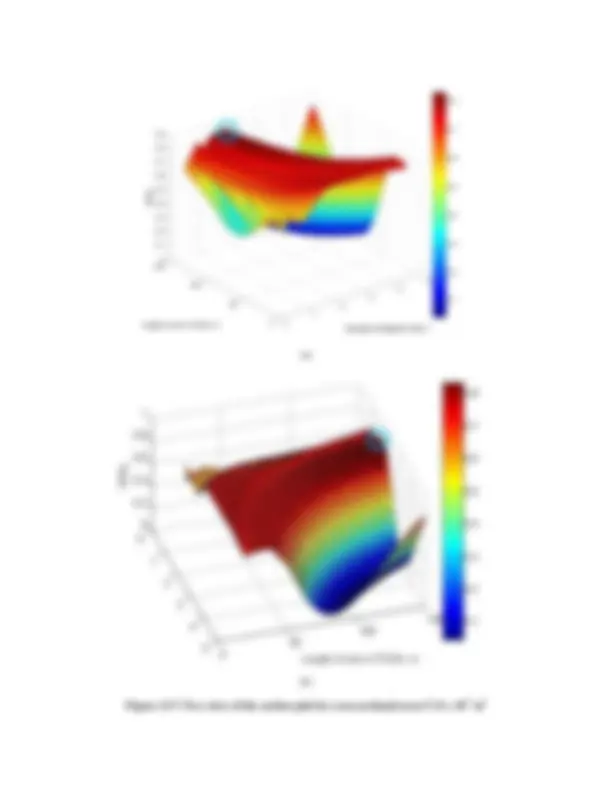
To explore the entire design space and lower the probability of getting stuck in local maxima during optimization, we ran a space filling full-factorial DOE with 10 levels. This DOE allowed us to discover the relationships between the main design variables and the total utility of the system. Evaluating a 10 level full- factorial created enough runs to generate a smooth surface plot which was used to visualize any local maxima and determine a good starting point for the optimization process. Since we have three design variables, the surface plots showed the effect of the magnetic field and wire length on the total utility for each value of the cross-sectional area, resulting in 10 surface plots. To account for the uncertain variables, we kept the car mass constant during the full-factorial analysis. We ran the simulation five times to explore design space based on changes in the car mass (one run for each number of passengers in the car, i.e. 1, 2, 3, 4, or 5 passengers). The spring constant was kept at the expected value for all five simulations because it was determined previously that this value did not have a large effect on the design objectives.
Through the design exploration described above, there were five different full-factorial simulations and 10 surface plots per simulation resulting in 50 figures. These plots, along with the individual spreadsheets, were analyzed to find values of the design variables in a global maximum. In all five simulations, a commonality with the cross-sectional area was the first few values generated the largest utility. The surface plots for these cross-sectional area values are shown below.
(b)
(a)
(c)