Download Problem Set 3 Solutions - General Physics | M S 0 and more Assignments Military Strategy and Training in PDF only on Docsity!
PHY–302 K. Solutions for problem set #3.
Textbook problem 2.26:
We know that final velocity v of the truck but not its initial velocity v 0
. We also know that the
truck smoothly slows down, which we interpret as constant negative acceleration a, but we don’t
know the value of that acceleration. Instead, we know the time t it took the truck to slow down
and the distance L it travelled during this time.
To solve this problem, we write equations for v and L in terms of a, v 0
, and t, and then solve
those equations for the a and the v 0
. For a motion at constant acceleration
v = v 0
− |a|t (S.1)
where a = −|a| for a negative acceleration. Also,
L = x − x 0
= v 0
t +
1
2
at
2 = v 0
t −
1
2
|a|t
2
. (S.2)
Combining the two equations, we have
L − vt = (v 0
t −
1
2
|a|t
2
) − (v 0
− |a|t) × t = +
1
2
|a|t
2
(S.3)
and therefore
|a| =
2(L − vt)
t
2
2 × (40.0 m − (2.80 m/s) × (8.50 s)
(8.50 s)
2
= 0 .448 m/s
2
, (S.4)
i.e., the trucks acceleration was a = − 0 .448 m/s
2
. Also,
2 L − vt = (2v 0
t − |a|t
2
) − (v 0
− |a|t) × t = +v 0
t (S.5)
and therefore the trucks initial velocity was
v 0 =
2 L − vt
t
2 L
t
− v =
2 × 40 .0 m
8 .5 s
− 2 .80 m/s = 6 .61 m/s. (S.6)
Alternative solution:
For any motion with constant acceleration, the average velocity over any period of time is the
average of the initial and the final velocities,
v avg
[between t 1
and t 2
] =
v(t 1
) + v(t 2
. (S.7)
Proof: While proving in class that v
2
2
− v
2
1
= 2a(x 2
− x 1
), I showed that
x 2 − x 1 =
1
2
(v 2 + v 1 ) × (t 2 − t 1 ); (S.8)
dividing both sides of this eq. by (t 2 − t 1 ) gives eq. (S.7).
Applying eq. (S.7) to the truck, we have
L
t
= v avg
v 0
and hence
v 0
= 2 ×
L
t
− v = 6 .61 m/s. (S.9)
Once we have this formula, the acceleration follows from
a =
v − v 0
t
(2.80 m/s) − (6.61 m/s)
8 .50 s
= − 0 .448 m/s
2
. (S.10)
Textbook problem 2.28:
(a) The lead car slows down from initial velocity v
(1)
0
= 25 m/s at constant negative acceleration
a = −2 m/s
2
. It comes to stop when
v(t) = v 0
solving this equation for the time t gives
t 1
v
(1)
0
−a
25 m/s
2 m/s
2
= 12 .5 s. (S.12)
(b) While the lead car comes to stop, it cover the distance
L
1
= v 0
t +
1
2
at
2
= (v 0
1
2
at =
1
2
v 0
) × t =
1
2
(25 m/s)(12.5 s) ≈ 156 m. (S.13)
The trailing car was 40 meters behind the lead car when they both began to stop, so its stopping
distance must be shorter than L
max
2
= L 1 + 40 m = 196 m. The stopping distance is related to
Alternative solution:
Using eq. (S.7), we have
L
t
= vavg =
v 1
(S.21)
and hence
t =
2 L
v 2
2 × 400 m
4 .56 m/s + 22.89 m/s
= 29 .1 s. (S.22)
Textbook problem 2.42:
Once the cable car’s driver slams the breaks, the car’s velocity becomes
v(t) = v 0
− |a| × t (S.23)
and it takes time
ts =
v 0
|a|
(S.24)
for a complete stop. We do not know the initial velocity v 0
or the deceleration rate |a|, but we
do know the stopping time t s
= 10 s. At the time t d
= 8 s when the car almost hit the dog, its
velocity was
v d
= v 0
− |a| × t d
= v 0
v 0
t s
× t d
= v 0
×
t d
t s
× v 0
. (S.25)
one fifth of the initial velocity (whatever that was).
The stopping distance of the cable car is
L
s
v
2
0
2 |a|
. (S.26)
The distance it traveled after almost hitting the dog is the same as it would take the car to stop
starting with a much reduced initial speed v d
L
′
s
v
2
d
2 |a|
. (S.27)
Since the deceleration a is the same in both cases, we have
L
′
s
L
s
v d
v 0
2
. (S.28)
Given L
′
s
= 4.0 m, it follows that the overall stopping distance of the cable car is Ls = 25× 4 .0 m =
100 m. The dog was 4 meters too close, so it was 96 m from the car when it began to stop.
PS: According to the data of this problem, the initial speed of the cable car is v 0 = 2Ls/ts =
20 m/s = 45 MPH. This is completely unrealistic: San Francisco cable cars travel at maximal
speed of only 9.5 MPH, and they cannot go any faster. And their stopping distance is a lot shorter
than 100 meters.
Textbook problem 2.50:
First, let me clarify: The parachutist himself is not in free fall because the parachute slows him
down. But once he drops the camera, the camera is in free fall until it hits the ground.
Let the x axis run up from the ground. When the camera is released, its initial position is
x 0
= +50 m. And it initial velocity v 0
is the same as the parachutist’s, 10 m/s in the downward
direction, i.e. v 0
= −10 m/s. After the release, the camera falls at constant acceleration a = −g =
− 9 .8 m/s
2
. Hence, the camera moves according to
x(t) = x 0 − |v 0 |timest −
1
2
g × t
2
. (S.29)
(a) The camera hits the ground when x(t) = 0. This condition gives us a quadratic equation for
the time,
g
× t
2
| × t − x 0
= 0 , (S.30)
so it fell down in just t 2
= 2.00 seconds. This gives us
x 2 (t 2 ) = x 0 + v
(2)
0
× t 2 − half g × t
2
2
= 0 , (S.38)
and consequently
v
(2)
0
gt 2
x 0
t 2
9 .80 m/s × 2 .00 s
50 .0 m
2 .00 s
= − 15 .2 m/s. (S.39)
In other words, the second stone was thrown with a downward velocity of 15.2 m/s (or about
34 MPH).
(c) Using v = v 0
− gt for each stone, we find the impact velocities:
v
(1)
= v
(1)
0
− g × t 1
= − 2 .00 m/s
2
− 9 .8 m/s
2
× 3 .00 s = − 31 .4 m/s for the first stone,
v
(2)
= v
(2)
0
− g × t 2
= − 15 .2 m/s
2
− 9 .8 m/s
2
× 2 .00 s = − 34 .8 m/s for the second stone.
(S.40)
The minus signs here indicate that both velocities are directed downwards (which should be
obvious).
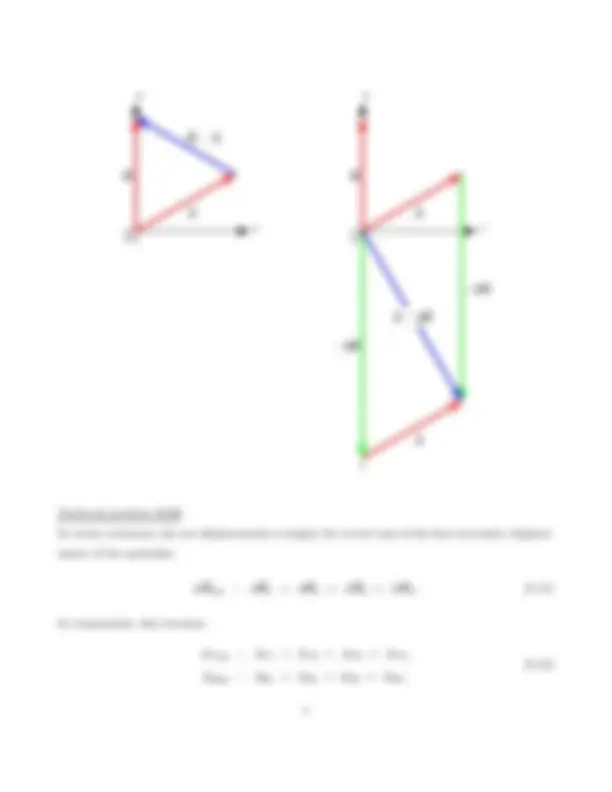
Textbook problem 3.8:
x
y
O
A
A
B
B
A +
B
x
y
O
A
B
A −
B
x
y
O
A
B
B −
A
x
y
O
A
A
B
B
B
A − 2
B
Textbook problem 3.12:
In vector notations, the net displacements is simply the vector sum of the four successive displace-
ments of the spelunker,
R
net
R
1
R
2
R
3
R
4
. (S.41)
In components, this becomes
∆x net
= ∆x 1
∆y net
= ∆y 1
(S.42)
Textbook problem 3.16:
Strictly speaking, 2D vector calculus applies only to motion on a flat plane rather than on the
spherical surface of the Earth. But for displacements of no more than a few hundred miles, the
Earth’s curvature has only a small effect and may be neglected. So for simplicity, we approximate
the relevant patch of the Earth surface (the US between Dallas, Atlanta, and Chicago) as flat and
use the 2D vector calculus.
Let
R
D
R
A
, and
R
C
be the radius vectors of respectively Dallas, Atlanta, and Chicago. The
relative position of Atlanta with respect to Dallas corresponds to a vector
R
DA
R
A
R
D
(S.48)
having magnitude 730 miles and direction 5
◦ North of due East. In the coordinate system where
the x axis runs due East and the y axis runs due North, this gives us
x A
− x D
= 730 mi × cos 5
◦
≈ 727 mi,
y A
− y D
= 730 mi × sin 5
◦
≈ 64 mi.
(S.49)
Likewise, the relative position of Chicago with respect to Atlanta
R
AC
R
C
R
A
(S.50)
having magnitude 560 miles and direction 21
◦ West of due North. In our coordinate system that’s
◦
◦ = 111
◦ counterclockwise from the x axis, hence
x C
− x A
= 560 mi × cos 111
◦
≈ −201 mi,
y C
− y A
= 560 mi × sin 111
◦
≈ +523 mi.
(S.51)
Now, the position of Chicago relative to Dallas follows by adding vectors (S.48) and (S.50):
R
DC
R
C
R
D
R
C
R
A
R
A
R
D
). (S.52)
In components, this gives us
x C
− x D
= (x C
− x A
) + (x A
− x D
) = (727 mi) + (−201 mi) = 526 mi,
y C
− y D
= (y C
− y A
) + (y A
− y D
) = (64 mi) + (523 mi) = 587 mi,
(S.53)
which means Chicago is 526 miles East and 587 miles North of Dallas. Consequently, the displace-
ment vector ∆
R
DC
from Dallas to Chicago has magnitude
R
DC
(∆x DC
2
2
2
2 mi ≈ 788 mi (S.54)
and direction
θ DC
= arctan
∆y DC
∆x DC
= arctan
587 mi
526 mi
◦
8
′
(S.55)
counterclockwise from the x axis, i.e. North from due East.
In other words, Chicago is 788 miles from Dallas in the direction 48
◦ 8
′ North of due East (or
◦ 8
′ North from NE).
Textbook problem 3.20:
From the first plane’s point of view, the net displacement vector from airport A to airport B is
the vector sum of 3 displacements: ∆
R
1
, of magnitude 300 km and direction due East; ∆
R
2
, of
magnitude 350 km and direction 30
◦ West of North; and ∆
R
3
, of magnitude 150 km and direction
due North. To sum these vectors, we first convert them to components using x axis pointing East
and y axis pointing North. Thus,
∆x 1
= 300 km × cos(
◦
) = 300 km,
∆y 1
= 300 km × sin(
◦
) = 0 km,
∆x 2
= 350 km × cos(
◦
◦
) = −175 km,
∆y 2
= 350 km × sin(
◦
◦
) = +303 km,
∆x 3
= 150 km × cos(
◦
) = 0 km,
∆y 3
= 150 km × sin(
◦
) = +150 km,
(S.56)
and consequently
∆xnet ≡ x B
− x A
= ∆x 1 + ∆x 2 + ∆x 3 = 300 km − 175 km + 0 km = +125 km,
∆ynet ≡ y B
− y A
= ∆y 1 + ∆y 2 + ∆y 3 = 0 km + 303 km + 150 km = +453 km.
(S.57)
The second plane flew directly from airport A to airport B in a straight line. In other words,
it flew in the direction of the net displacement vector ∆
R
AB
whose components are given by