Download Numerical Computing Problem Set 5 Solutions - Prof. Donald W. Schwendeman and more Assignments Mathematics in PDF only on Docsity!
D. Schwendeman
Numerical Computing Problem Set 5
Due: Thursday, 10/27/
- Consider the data consisting of the four points (− 3 , −7), (− 1 , 6), (0, 4) and (2, −12). Construct an interpolating polynomial of degree three of less that fits the data. Determine the polynomial (by hand) in two ways: (a) using Lagrange basis functions and (b) using Newton basis functions. For the Newton basis, determine the weights using a divided difference table.
- (a) Write a matlab function, myPolyfit, that computes the weights ai, i = 1, 2 ,... , n, of the Newton interpolating polynomial f˜ (t) of degree n − 1 (or less). The input to the function is the data (ti, yi), i = 1, 2 ,... , n and the weights should be computed based on divided differences following the algorithm discussed in class. Write a second matlab function, myPolyval, that takes the weights {ai}, the nodes {ti}, and a point x (or vector of points) and returns the value of f˜ (x) using the nested iteration discussed in class. (b) Consider the function
f (t) = 5 exp(−t^2 ) cos(7t), for t ∈ [− 1 , 1]
Use your matlab functions to find the weights for f˜ (t) fitted to the data (ti, f (ti)), i = 1 , 2 ,... , 11, where ti are equally spaced nodes on [− 1 , 1]. (Hint: consider the matlab function t=linspace(-1,1,11) and the matlab examples on the course website.) Plot f (x) and f˜ (x) on the same graph for many values of x on [− 1 , 1] (e.g. use x=linspace(-1,1,400).) Comment on the behavior of the interpolating polynomial. (c) Repeat part (b) for the Chebychev nodes ti = − cos((2i − 1)π/22), i = 1, 2 ,... , 11. (Hint: consider the matlab examples on the course website.)
- A polynomial f˜ (t) of degree two or less is fitted to the function f (t) = (1 + t)−^1 at nodes t 1 = 0, t 2 = 1, and t 3 = 3. Use the error formula to find an upper bound for the maximum absolute difference between f (t) and f˜ (t) for values of t on the interval [0, 3].
- Computer problem 7.4 on page 337. Note: the interpolating polynomial may be computed using your matlab functions obtained in problem 2 above or using matlab’s built-in functions polyfit and polyval. The cubic spline may be computed using matlab’s spline routine.
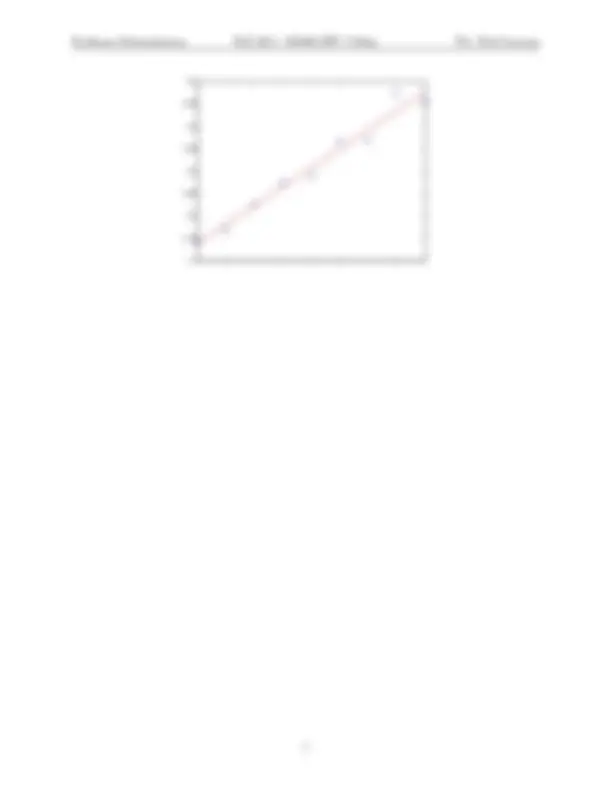
- An experiment generates the data ti 0. 1 0. 2 0. 3 0. 4 0. 5 0. 6 0. 7 0. 8 0. 9 yi 1. 143 1. 168 1. 226 1. 274 1. 289 1. 366 1. 367 1. 471 1. 453 Find the coefficients a 0 and a 1 of the best-fit line of the form y = a 0 + a 1 t to the data. Plot the data and the best-fit line on the same graph.
Problem 1
ti − 3 − 1 0 2 yi − 7 6 4 − 12
Part (a) Following section 7.3.2 of the book as a guide, we see that we have four data points, so n = 4; our interpolating polynomial is p 3 (t) = y 1 1 (t) + y 2 2 (t) + y 3 3 (t) + y 4 4 (t). The equations for j (t) are given asj (t) =
∏nk=1,k 6 =j (t−tk ) ∏nk=1,k 6 =j (tj −tk ) , 1 ≤ j ≤ n. Then we have 1 (t) = (^) (t( 1 t−−tt 22 )()(tt 1 −−tt^33 )()(tt− 1 −t^4 t) 4 ) = (^) (−(t+1)2)(−t(3)(t−−2)5) ; similarly, 2 (t) = (^) (2)((t+3)−1)(t(t−−2)3) , 3 (t) = (t+3)((3)(1)(t+1)(−2)t− 2), and 4 (t) = (t+3)( (5)(3)(2)t+1) t. Hence the interpolant is p 3 (t) = − 7 1 (t) + 6 2 (t) + 43 (t) − 12 4 (t) = 4 − 133 t − 136 t^2 + 16 t^3 , with the `j computed above.
Part (b) For Newton interpolation, the basis functions are given by πj (t) = ∏j k−=1^1 (t − tk), 1 ≤ j ≤ n; the coefficients for these basis functions are given by the divided differences formula, whose recursion relation is given on page 320. The divided differences approach yields the following coefficients (f [t 4 ] = −12 is not in the table).
f [t 1 ] = y 1 = − 7 f [t 2 ] = 6 f [t 3 ] = 4 f [t 1 , t 2 ] = f^ [t t^22 ]−−ft 1 [ t^1 ]= (^) −6+71+3 = 13/ 2 f [t 2 , t 3 ] = (^4) 0+1−^6 = − 2 f [t 3 , t 4 ] = − 212 −− 0 4 = − 8 f [t 1 , t 2 , t 3 ] = f^ [t^2 ,t^3 t 3 ]−−ft 1 [ t^1 ,t^2 ]= −^2 0+3−^13 /^2 = − 17 / 6 f [t 2 , t 3 , t 4 ] = −2+18+2 = − 2 f [t 1 , t 2 , t 3 , t 4 ] = f^ [t^2 ,t^3 ,t t^44 ]−−ft 1 [t 1 ,t^2 ,t^3 ]= −2+172+3 /^6 = 1/ 6
The basis functions are π 1 (t) = 1, π 2 (t) = t − t 1 = t + 3, π 3 (t) = (t − t 1 )(t − t 2 ) = (t + 3)(t + 1), and π 4 = (t − t 1 )(t − t 2 )(t − t 3 ) = (t + 3)(t + 1)t. Hence our interpolant is p(t) = f [t 1 ] + f [t 1 , t 2 ]π 2 (t) + f [t 1 , t 2 , t 3 ]π 3 (t) + f [t 1 , t 2 , t 3 , t 4 ]π 4 (t) = −7 + 132 (t + 3) − 176 (t + 1)(t + 3) + 16 t(t + 1)(t + 3) = 4 − 133 t − 136 t^2 + 16 t^3.
Problem 2
Part (a) Your code for myPolyfit.m might look like this.
1 function a=myPolyfit(t,y)
8 if length(a) 6 =n 9 disp('Error : lengths of t and a must agree') 10 return 11 end 12 13 % nested iteration 14 y=a(n); 15 for k=n-1:-1: 16 y=a(k)+(x-t(k)).*y; 17 end
Part (b) We could use the following code...
1 t = linspace(-1,1,11); f = (^5) * exp(-t.ˆ2) .* cos(7 * t); 2 x = linspace(-1,1,400); a = myPolyfit(t,f); y = myPolyval(t,a,x); 3 fx = (^5) * exp(-x.ˆ2) .* cos(7 * x); plot(x,fx,'k',x,y,'r',t,f,'o');
...to produce the following graph.
−5−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
−
−
−
−
0
1
2
3
4
5
The original function is in black; the interpolant is in red; interpolation nodes are circled. Note that the interpolant overshoots the original function near the endpoints.
Part (c) Replace the expression for t in the code above with j = 1:11; t = -cos((2j-1)pi/22); to produce the following figure (same legend as above).
−5−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
−
−
−
−
0
1
2
3
4
5
Note how the choice of nodes prevented the overshoot from occurring in this case.
Problem 3
The general error formula is f (t) − fˆ (t) = f^ (n n)!( θ)(t − t 1 )...(t − tn) for some θ in the interval of interpolation, where the ti are the nodes of the interpolation problem. To bound the LHS, we can bound the RHS. There are several ways to do this; here, I’ll maximize separately f^ (n n)!(θ) and (t − t 1 )...(t − tn). Doing this, we get
∣ f^ (3) n(!θ)
∣ = ∣∣− 1 /(θ + 1)^4 ∣∣^ ≤ 1 (the value at θ = 0); | ∣(t − 1)(t − 3)t| ≤ 2 .113 (the approximate absolute value at t ≈ 2 .215). Hence |f (t) − fˆ (t)| = ∣∣ f (3) n!( θ)(t − 1)(t − 3)t^ ∣∣∣ ≤ max^ ∣∣∣ f (3) n!(θ)^ ∣∣∣ · max |(t − 1)(t − 3)t| ≤ 2 .113.
We could also have taken the approach in the book for a more coarse estimate.
Problem 4: Computer Problem 7.4, page 337
Here’s some code using the built-in functions for interpolation.
1 % Runge function f(t) evaluated at lots of points (for nice plotting) 2 t = linspace(-1,1,10ˆ3); 3 f = 1 ./ (1 + (^25) * t.ˆ2); 4
−60−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
−
−
−
−
−
0
10
Polynomial interpolation is in black; cubic spline interpolation is in red; the Runge function is in green; the interpolation points are circled.
Problem 5
Using the equations from class, our code might look like this...
1 % enter the data 2 t = .1:.1:.9; y = [1.143,1.168,1.226,1.274,1.289,1.366,1.367,1.471,1.453]; 3 4 % solve the system of equations provided in class 5 a = [length(t),sum(t);sum(t),sum(t.ˆ2)] \ [sum(y);sum(t.y)]; 6 c=[a(2),a(1)]; 7 8 % plot 9 T = linspace(t(1),t( end ),500); plot(t,y,'o',T,a(1)+a(2)T,'r');
...and produce a figure that looks like the following.
- 1.10.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.