
Prepare for your exams
Study with the several resources on Docsity

Earn points to download
Earn points by helping other students or get them with a premium plan

Guidelines and tips


Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Problem Solving by searching, Lecture notes of Artificial Intelligence
Solve some problems of searching algorithm
Typology: Lecture notes
2018/2019

1 / 43

This page cannot be seen from the preview
Don't miss anything!































Related documents
Partial preview of the text
Download Problem Solving by searching and more Lecture notes Artificial Intelligence in PDF only on Docsity!
SOLVING PROBLEMS
BY SEARCHING
Nguyễn Ngọc Thảo [email protected] CS420 – Artificial Intelligence
Outline
- Problem-Solving Agents
- Example Problems
- Searching for Solutions
A touring holiday in Romania
What makes a good trip at Arad?
- take in the sights, enjoy the foods, etc.
- avoid hangovers
- … However, there will be your friend’s wedding tomorrow at Bucharest!!!
Goal-based agents
- Intelligent agents are supposed to maximize their
performance measure.
- Different factors for performance measure → making decisions involves many tradeoffs
- Goals help organize behavior by limiting the objectives that
the agent is trying to achieve and the actions it considers.
Traveling from Arad to Bucharest
Goal-based agents in Romania
- The agent initially does not know which road to follow
→ unknown environment, try an action randomly
- Suppose the agent has a map of Romania.
An agent with several immediate options of unknown value
can decide what to do by first examining future actions that
eventually lead to states of known value.
- The agent discovers many hypothetical
journey and finds a journey that
eventually gets to Bucharest.
Solving problem by searching
- Search: the process of looking for a sequence of actions
that reaches the goal
- A search algorithm takes a problem as input and returns a
solution in the form of an action sequence.
- Execution phase: once a solution is found, the
recommended actions are carried out.
- While executing the solution, the agent ignores its percepts when choosing an action → open-loop system
Solving problem by searching
function SIMPLE-PROBLEM-SOLVING-AGENT( percept ) returns an action persistent : seq , an action sequence, initially empty state , some description of the current world state goal , a goal, initially null problem , a problem formulation state ← UPDATE-STATE( state, percept ) if seq is empty then goal ← FORMULATE-GOAL( state ) problem ← FORMULATE-PROBLEM( state, goal ) seq ← SEARCH( problem ) if seq = failure then return a null action action ← FIRST( seq ) seq ← REST( seq ) return action
The state space
- The set of all states reachable from the initial state by any
sequence
- Implicitly defined by the initial state, actions, and transition model
- Directed graph – nodes are states and the links between
nodes are actions.
- A path in the state space is a sequence of states connected by a sequence of actions.
Well-define problems and solutions
- Goal test: determine whether a given state is a goal state
- The goal is specified by either an explicit set of possible goal states or an abstract property.
- E.g., 𝐼𝑛(𝐵𝑢𝑐ℎ𝑎𝑟𝑒𝑠𝑡), checkmate
- Path cost: a function that assigns a numeric cost to each
path
- Nonnegative, reflecting the agent’s performance measure
- E.g., 𝑐 𝐼𝑛 𝐴𝑟𝑎𝑑 , 𝐺𝑜 𝑍𝑒𝑟𝑖𝑛𝑑 , 𝐼𝑛 𝑍𝑒𝑟𝑖𝑛𝑑 = 75
- An optimal solution has the lowest path cost.
Formulating problems by abstraction
- Abstraction is critical for automated problem solving
- Real-world is too detailed to model exactly
- Create an approximate, simplified, model of the world for the computer to deal with
- The choice of a good abstraction thus involves
- Removing as much detail as possible while
- Retaining validity and ensuring that the abstract actions are easy to carry out
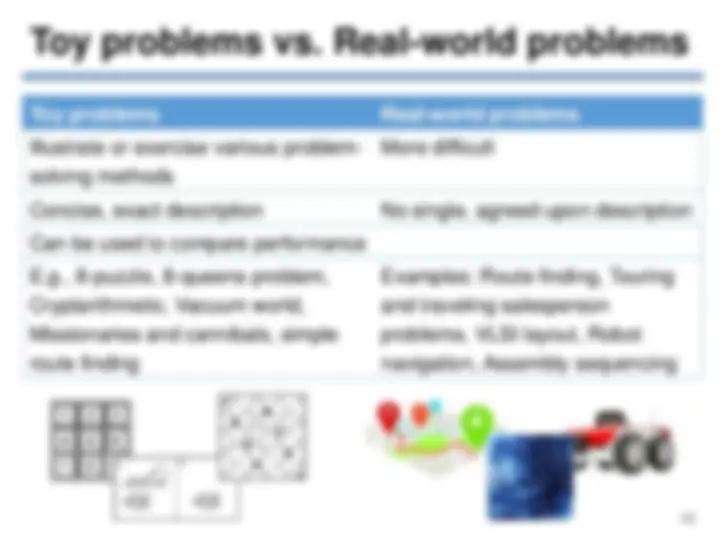
Example Problems
- Toy Problems
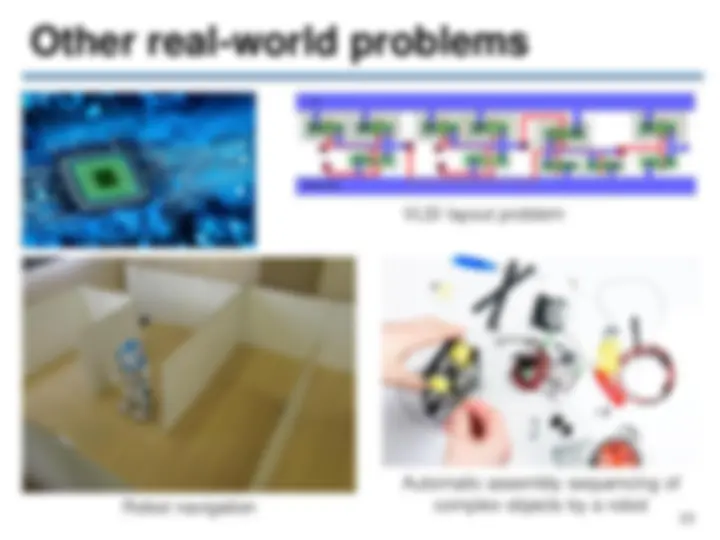
- Real-world Problems
The Vacuum-cleaner world
- States: determined by both the agent location and the dirt
locations
- 2 × 2 2 = 8 possible world states (𝑛 × 2 𝑛 in general)
- Initial state: Any state can be designated as the initial state.
- Actions: Left, Right, and Suck
- Larger model may include Up and Down, etc.
- Transition model: The actions have their expected effects.
- Except that moving Left in the leftmost square, moving Right in the rightmost square, and Sucking in a clean square have no effect.
- Goal test: whether all the squares are clean
- Path cost: each step costs 1
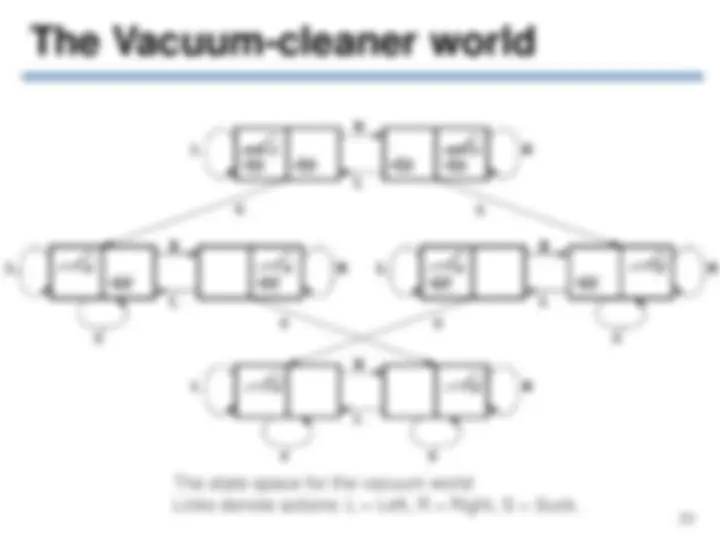
The Vacuum-cleaner world
The state space for the vacuum world Links denote actions: L = Left, R = Right, S = Suck.