


The Hough Transform
Frank Dellaert
Slides adapted from Jay Summet












Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The hough transform is a powerful technique used in computer vision to identify lines and other parametrized objects in images. The concept of the hough transform, its mechanics, and its optimizations. It also provides real-world examples of using the hough transform for finding circles and coins.
Typology: Study notes
1 / 23

This page cannot be seen from the preview
Don't miss anything!
Camera Projector Screen Computer Camera(s) used to orient one or more projectors in relation to each other and to elements in the world such as projection surfaces.
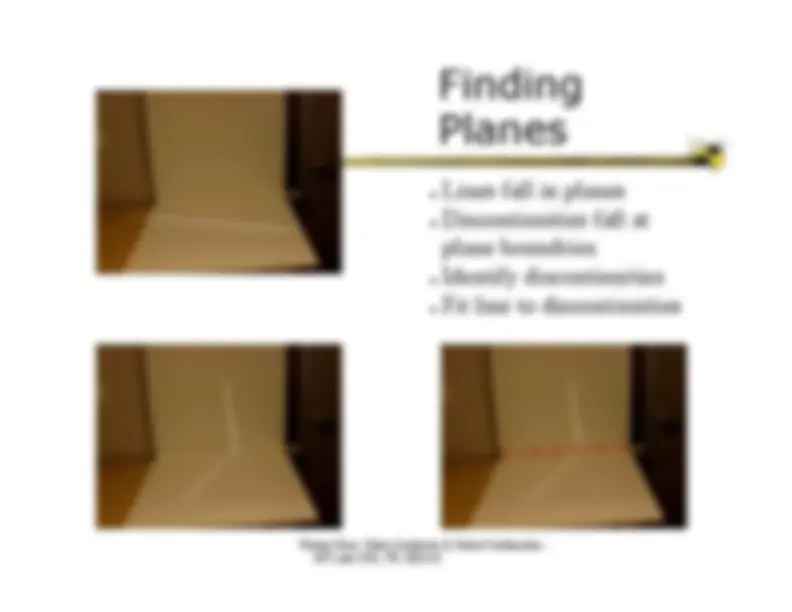
Photos from: Mark Ashdown & Rahul Sukthankar - HP Labs CRL TR 2003- ● Lines fall in planes ● Discontinuities fall at plane boundries. ● Identify discontinuities ● Fit line to discontinuities
Line Fitting To Find Calibration Points
Purports to answer all three questions We explain for lines One representation: a line is the set of points (x, y) such that: (cos θ) X + (sin θ) Y+ r = 0 Different choices of θ, r> give different lines For any token (x, y) there is a one parameter family of lines through this point, given by (cos θ) X + (sin θ) Y + r = 0 Each point gets to vote for each line in the family; if there is a line that has lots of votes, that should be the line passing through the points
Construct an array representing θ, r For each point, render the curve (θ, r) into this array, adding one at each cell Difficulties how big should the cells be? (too big, and we cannot distinguish between quite different lines; too small, and noise causes lines to be missed) How many lines? count the peaks in the Hough array Who belongs to which line? tag the votes Hardly ever satisfactory in practice, because problems with noise and cell size defeat it
Tokens Votes Brightest point = 6 votes
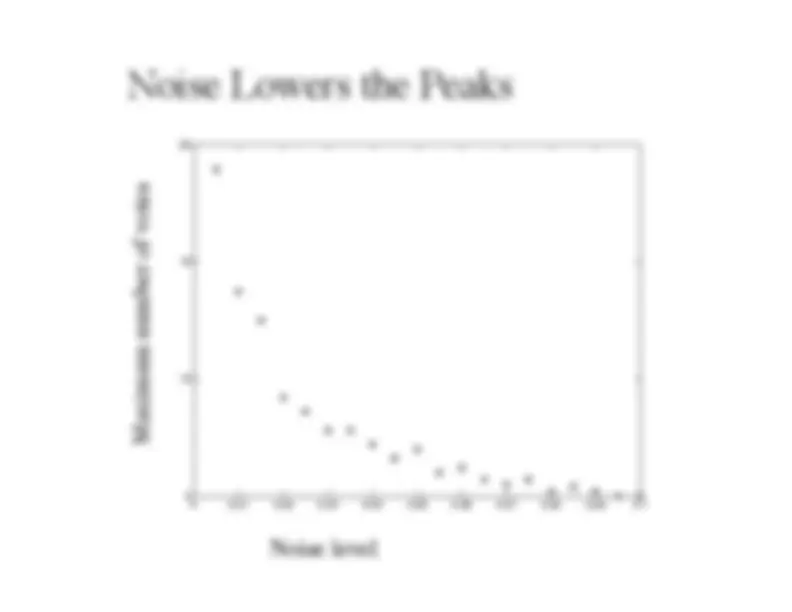
Noise Increases the Votes in Spurious Accumulator Elements
Real World Example Original (^) Edge Detection Found Lines Parameter Space
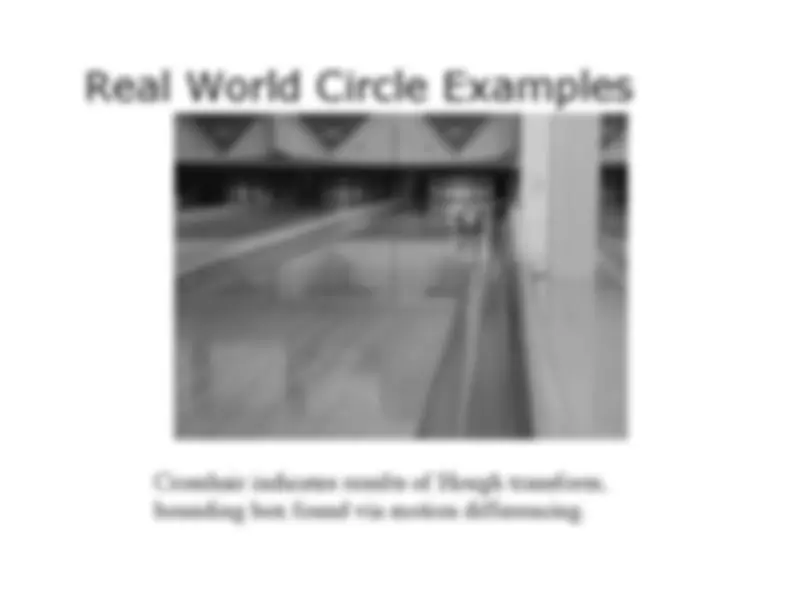
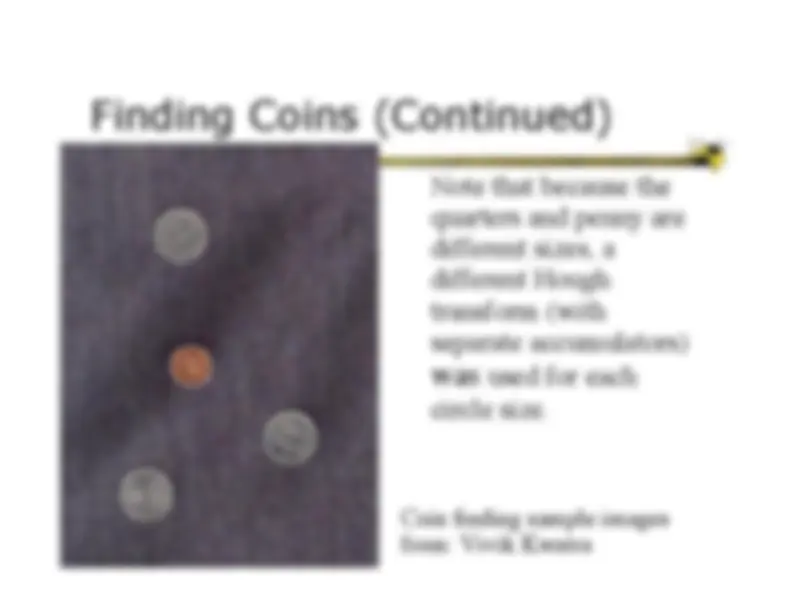
The Hough transform can be used to fit points to any object that can be paramatized. (e.g. Circle, elipse) Objects of arbitrary shape can be parameterized by building an R-Table. (Assumes orientation information for each token is available.) R and beta value(s) are obtained from the R-Table, based upon omega (orientation)
Crosshair indicates results of Hough transform, bounding box found via motion differencing.
Original (^) Edges (note noise)