Download Restoration of Noise Only Degradation-Colors Pictures And Digital Image Processing-Lecture Slides and more Slides Digital Image Processing in PDF only on Docsity!
2
Restoration of noise onlydegradation
Degraded Image
)^
In spatial domain:
)^
)^
In frequency domain:
g x y
G u v
g x y
f^
x y
x y
G u v
F u v
N u v
Considering H = 1 (a unity function)
degradation only involves
noise
3
Restoration of noise onlydegradation: Restoration filters ^
Mean filters ^
Arithmetic mean filter
^
Geometric mean filter
^
Harmonic mean filter
^
Contraharmonic mean filter
^
Order statistics filters ^
Median filter
^
Max and Min filter
^
Midpoint filter
^
Alpha-trimmed mean filter
5
Median filter ^
Output is based on ordering (ranking) the pixels in asubimage ^
Replaces the value of a pixel by the median of thegray levels in the neighborhood of that pixel ^
Excellent
for
removing
both
bipolar
and
unipolar
impulse noise
( , )
)^
xy
s t
S
f^
x y
median g s t
6
Median filter: Example
8
Max and Min filters: Example
Input imageis corruptedwith peppernoise (left)and saltnoise (right)
9
Midpoint filter ^
Filter output is the midpoint between maximum andminimum values of the gray levels in a subimage ^
Combines order statistics and averaging ^
Midpoint filter works best for randomly distributednoise (Gaussian or uniform noise)
�^
^
^
^
( , )
( , ) 1
( ,
)^
max
( , )
min
( , )
2
xy
xy^
s t
S
s t
S
f^
x y
g s t
g s t
^
^
^
12
Adaptive filters ^
The behavior of adaptive filters changes according to thestatistical
characteristics
of
the
image
in
the
filter
region
(subimage S
)xy^
^
This will enable the filters to have the desired response evenif the image has regions with totally different characteristics ^
Statistical
characteristics
considered:
Local
mean,
local
variance, local maximum, local minimum, local median, globalmean, global variance and noise variance ^
We study two adaptive filters: ^
Adaptive, local noise reduction filter ^
Adaptive median filter
14
Adaptive, local noise reductionfilter ^
The behavior of the filter ^
If^
2 = 0 (no noise)
f(x,y) = g(x,y)
, the filter should return
simply the value of
g(x,y)
^
If the local variance (
L
2 ) is high relative to noise variance
(^2)
),^
the
filter
should
return
a^
value
close
to
g(x,y)
i.e. ^
High
local
variance
S
xy^
is^
associated
with
edges,
so
preserve the edges
^
If the two variances are equal , we want the filter to returnthe arithmetic mean value of the pixels in S
.xy
^
This condition occurs when local area has same properties asoverall image, and local noise is to be reduced by simpleaveraging (in this case, edges are not blurred)
�^
)^
f^
x y
g x y
15
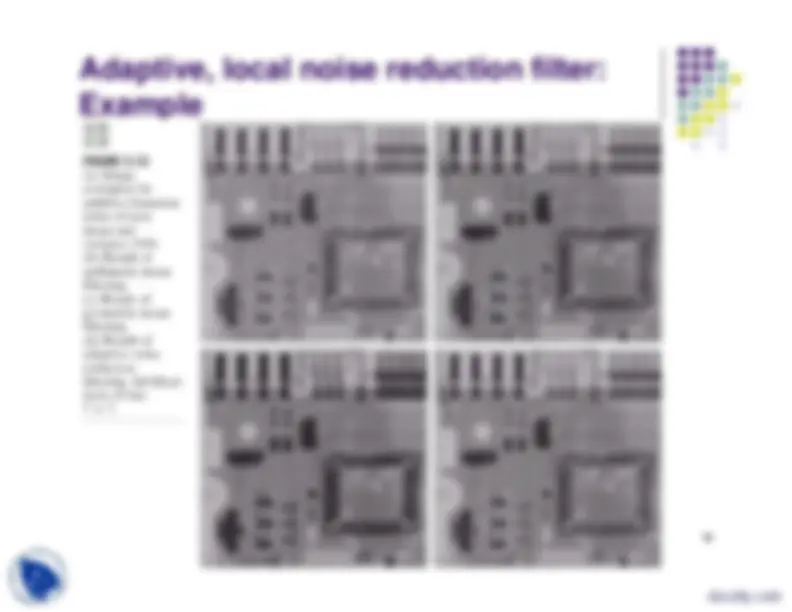
Adaptive, local noise reductionfilter
Mathematical expression of the filter
�
^
2 2
( ,
)^
( ,
)^
( ,
)^
L
L
f^
x y
g x y
g x y
m
NOTE: In real situations, the exact knowledge of noise variance(
2 ) is not known a priori. ATTENTION: Negative gray levels occur when
(^2)
(^2) L
17
Adaptive median filter ^
Suitable for higher level of salt and pepper noise(P
a^
= P
b^
0.2 as a rule of thumb)
^
AdvantagePreserve details while smoothing non-impulse noise(a traditional median filter is not capable of doing this) ^
Unlike previously discussed adaptive filter, theadaptive median filter changes (increases) the sizeof S
xy
during filter operation depending on certain
conditions
18
Adaptive median filter Suppose:
z^ min
and z
max
= minimum and maximum gray levels in S
xy
z^ med
= median of gray levels in S
xy
z^ xy
= gray level at coordiante (x,y) Smax
= maximum allowed size of S
xy
Algorithm:Level A:
A1 = z
med
min
A2 = z
med
max
if A1 > 0 AND A2 < 0, Goto Level BElse increase the window sizeif window size
≤ S
max
, repeat Level A
Else Output z
xy
Level B:
B1 = z
xy^
min
B2 = z
xy^
max
if B1 > 0 AND B2 < 0, output z
xy
Else Output z
med