


MAE263B: Dynamics of Robotic Systems
Discussion Section –Week5
: Jacobian (SCARA)
Seungmin Jung
02.07.2020.




















































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Lecture 2: Rigid Body Configuration and Velocity Advanced Control for Robotics Prof. Wei Zhang
Typology: Lecture notes
1 / 64

This page cannot be seen from the preview
Don't miss anything!
N
2
1
N
N
r
0
0
Tip Location in Joint Space
Tip Location in Cartesian Space
X = FK( )
=IK(X)
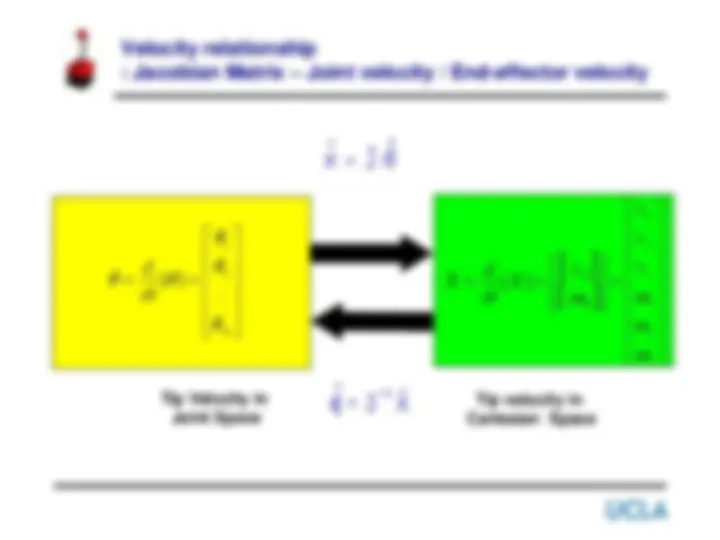
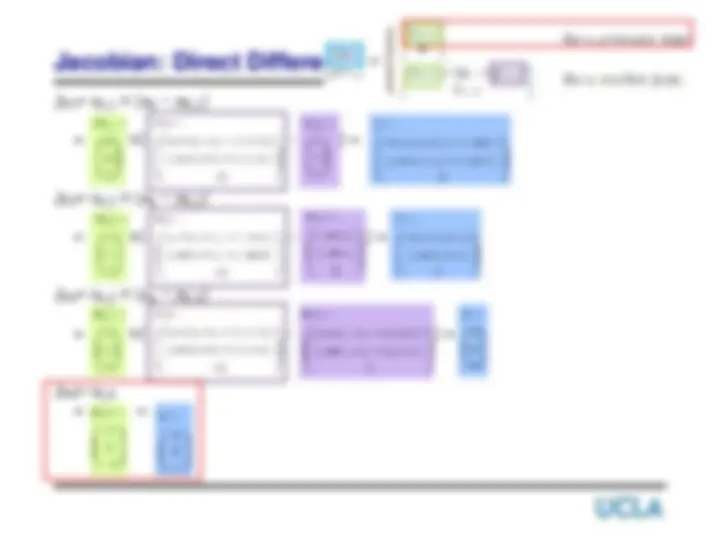
Jacobian Matrix - Introduction
: The relationship between
the joint angle rates ( )
and the translation and rotation velocities of the end
effector ( ).
the robot joint torques ( )
and the forces and moments ( )
at the robot end effector ( Static Conditions ).
x^ =J( ) ^
F
J ( ) F
T =
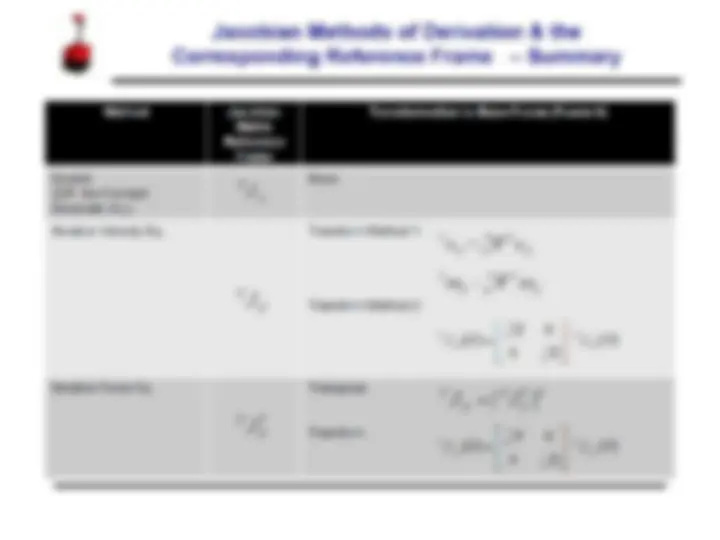
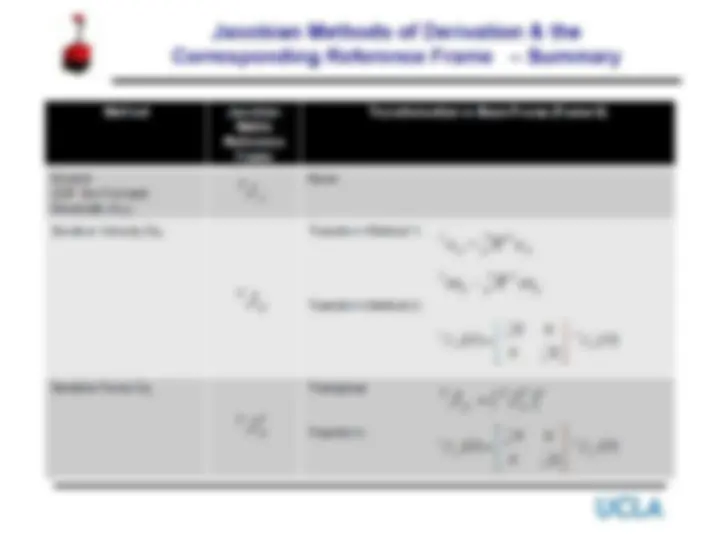
Jacobian Matrix
Differentiation the
Forward Kinematics Eqs.
Iterative Propagation (Velocities or Forces / Torques)
( )
z N
y
x
z J
y
x
2
1
N
J( )
6x1 (^) 6xN Nx
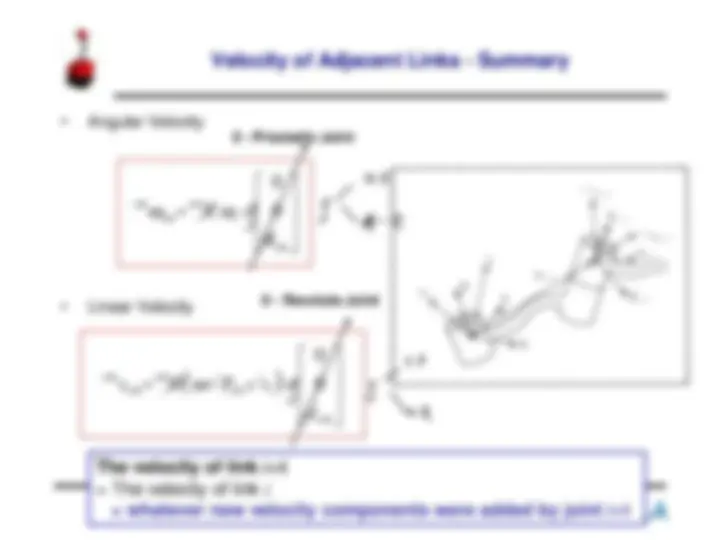
linear and angular position relationship between adjacent links.
relative to the robot base frame {0}.
T TT T
i i
o o i
1 1 1 2
− =
1 1 1 0 1
i i i (^) i i i
− − −
A
B
A (^) Q B (^) P
Q
A B B B
A Q
A B BORG B
A Q
A V = V + R V + R P
( (^) Q)
A B B
A Q B
A B BORG B
A Q
A V = V + R V + R R P
A
B
A (^) Q B (^) P
and this frame of reference is noted with a leading superscript.
written
Q
B
A
Q
A B P dt
d ( V )=
Q
Computed (Measured)
Represented (Reference Frame)
A V
A B
Q Q
B (^) P
to a rigid body whereas frame {A} is fixed. The vector is constant as view from frame {B}
vector representing the the point Q relative to frame {A}
is constant as view from frame {B} it is clear that point Q will have a velocity as seen from frame {A} due to the rotational velocity
Q
B P
Q =^0
B V
B V
Q
B P
Q
B P
B
A BORG=^0
A V
Q
A B B B
A Q
A B BORG B
A Q
A V = V + R V + R P (^ Q)
A B B
A Q B
A B BORG B
A Q
A V = V + R V + R R P