



Institute of Visual Computing
Rigid Transformations
--- the geometry of SO(3) & SE(3) ---
Luca Ballan
Mathematical Foundations of
Computer Graphics and Vision






















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Rigid transformations, linear matrix groups, manifolds, and Lie groups/Lie algebras, focusing on SO(2) and SO(3). It covers the geometry of these groups, their isomorphisms, and the importance of understanding rigid transformations in computer graphics and vision.
Typology: Study Guides, Projects, Research
1 / 53

This page cannot be seen from the preview
Don't miss anything!
Institute of Visual Computing
it is very thin!!
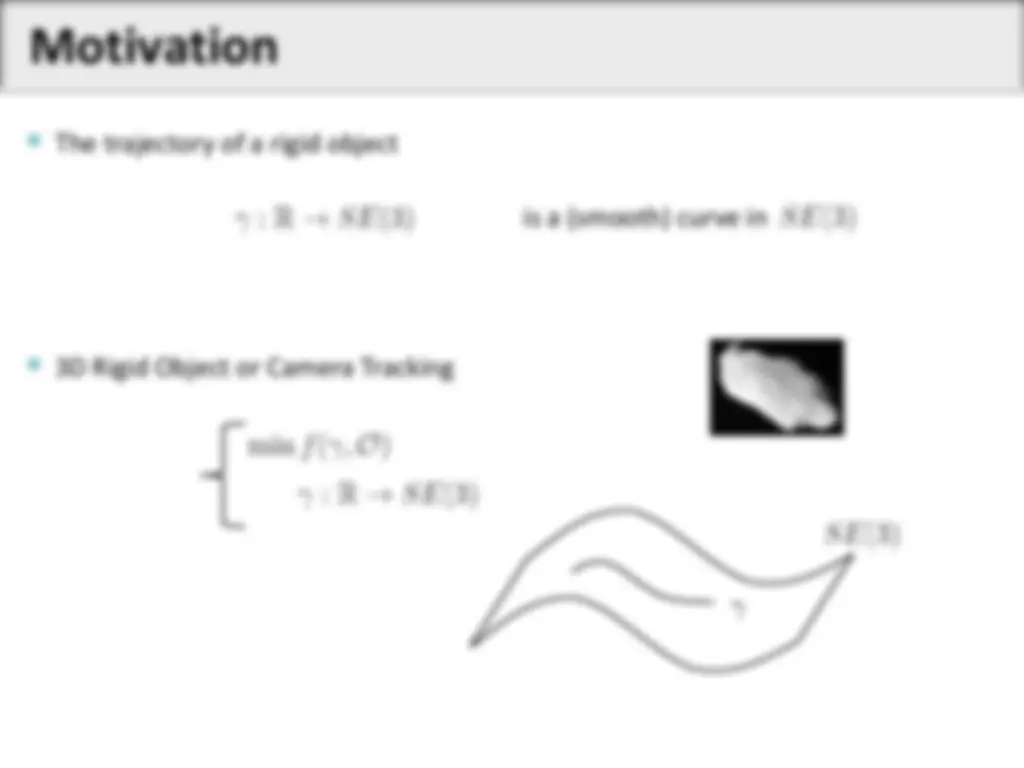
( unconstrained minimization problem )
( unconstrained minimization problem with functions as domain)
( constrained minimization problem )
Rigid Registration
Camera pose estimation
Input: two images (with known intrinsics) Compute correspondences between these images Estimate the essential matrix Factorize E in (R,t) Compute the 3D structure Bundle-Adjustment
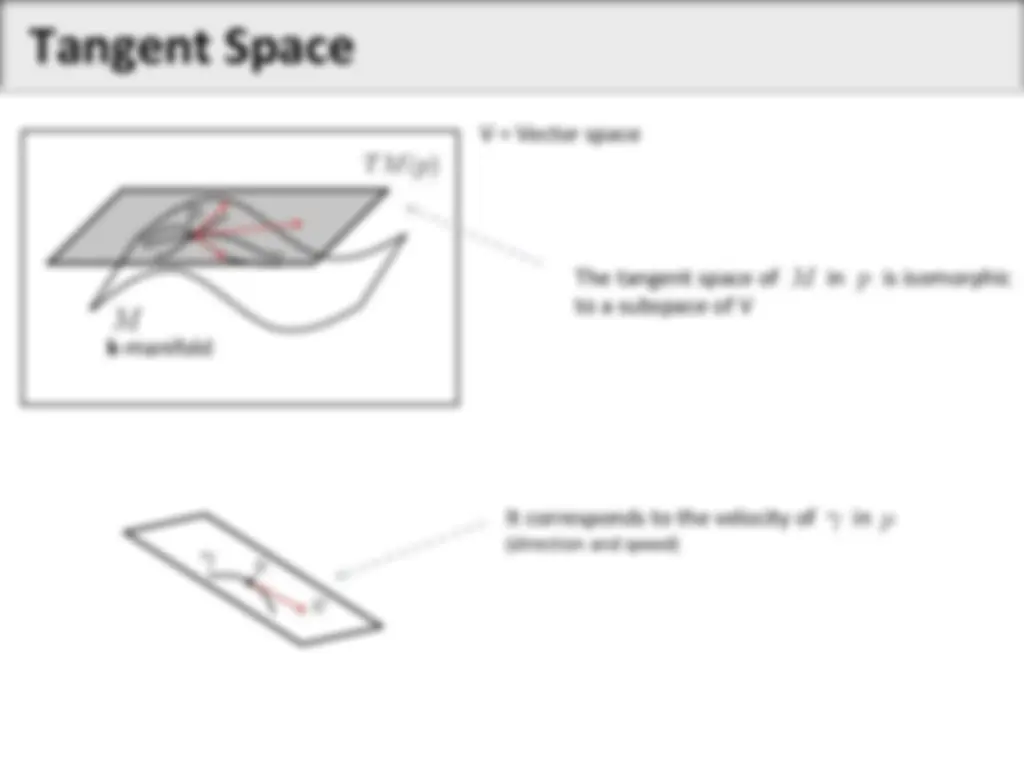
is a (smooth) curve in
Rigid transformations
Linear Matrix Groups
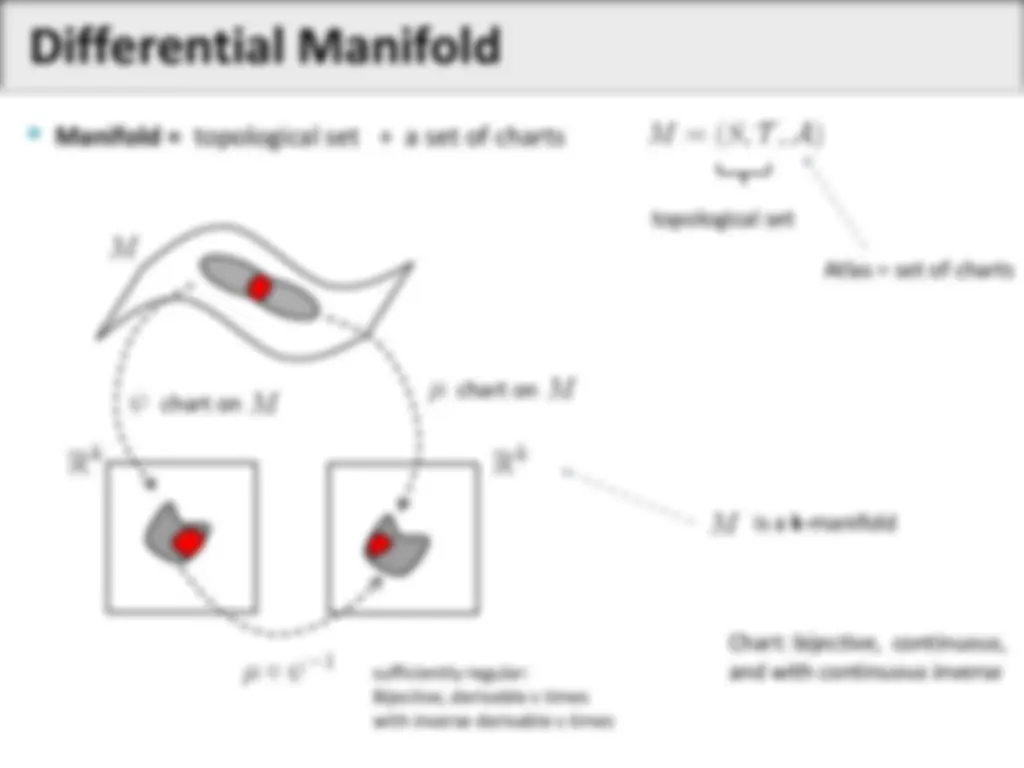
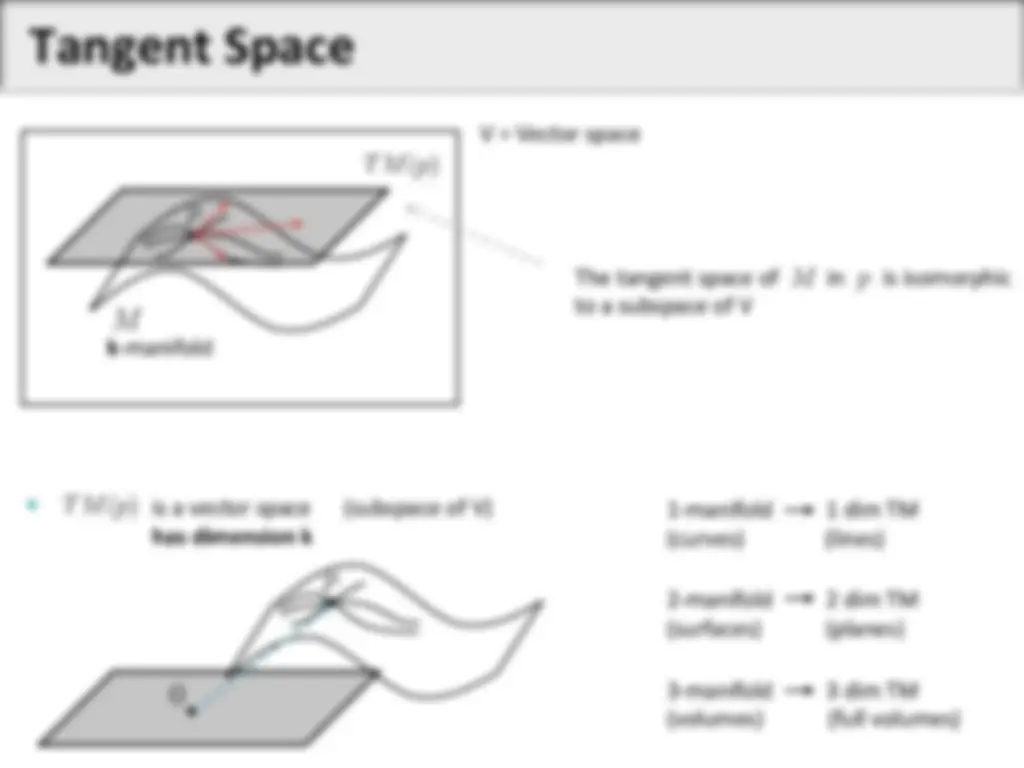
Manifolds
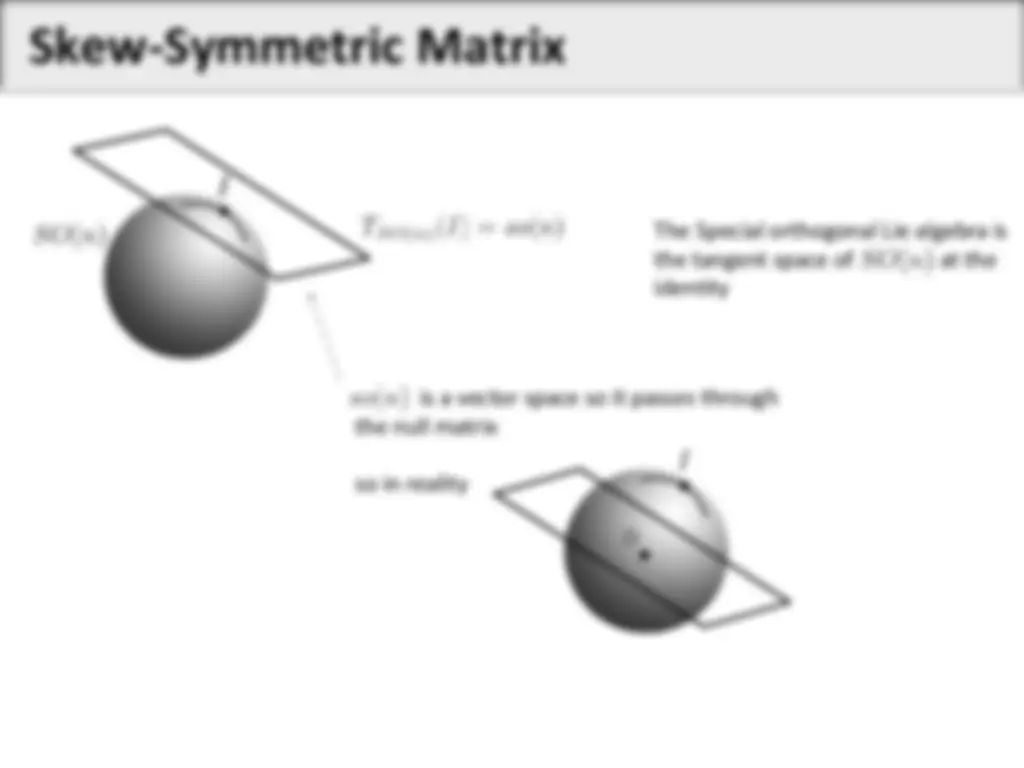
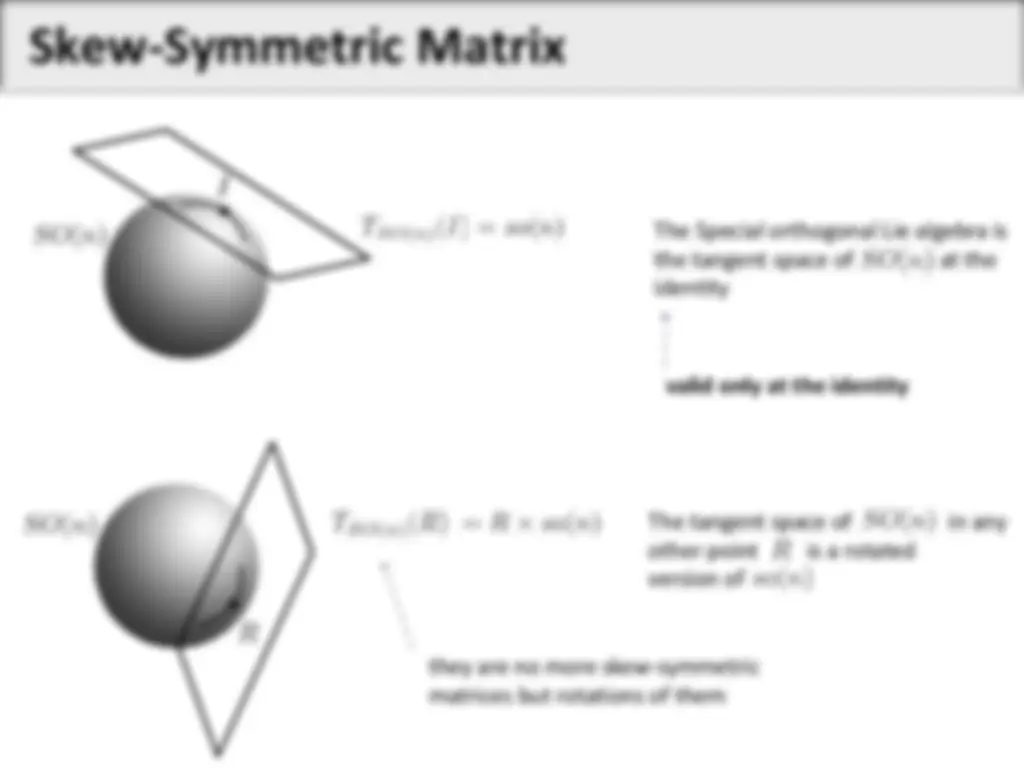
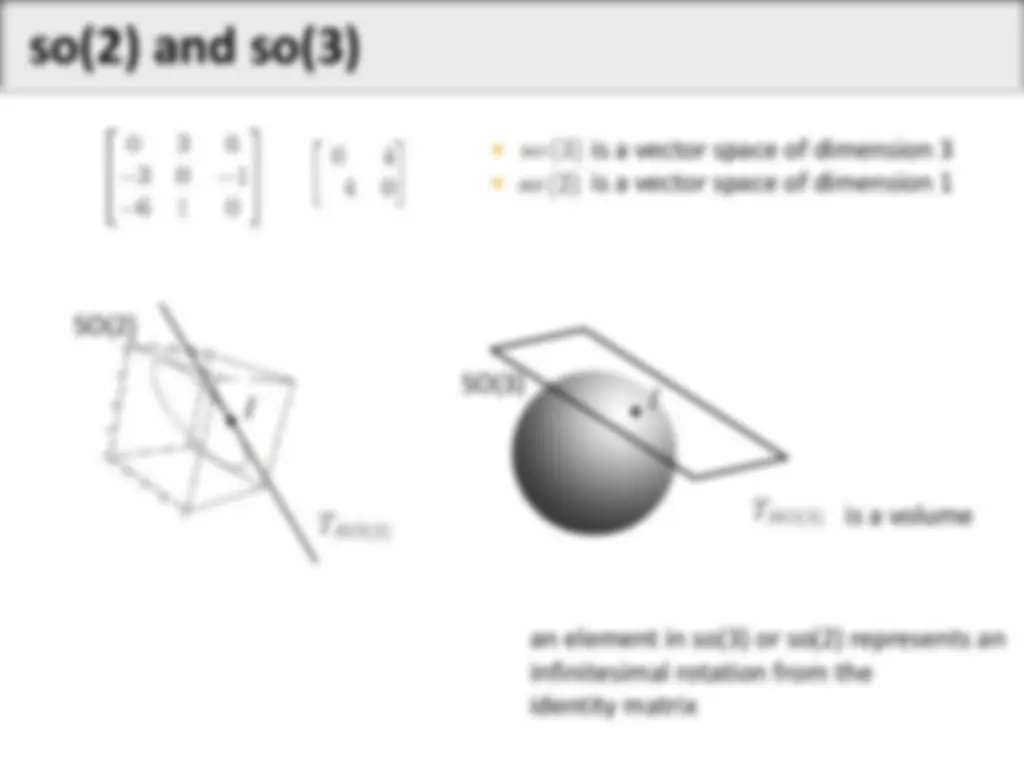
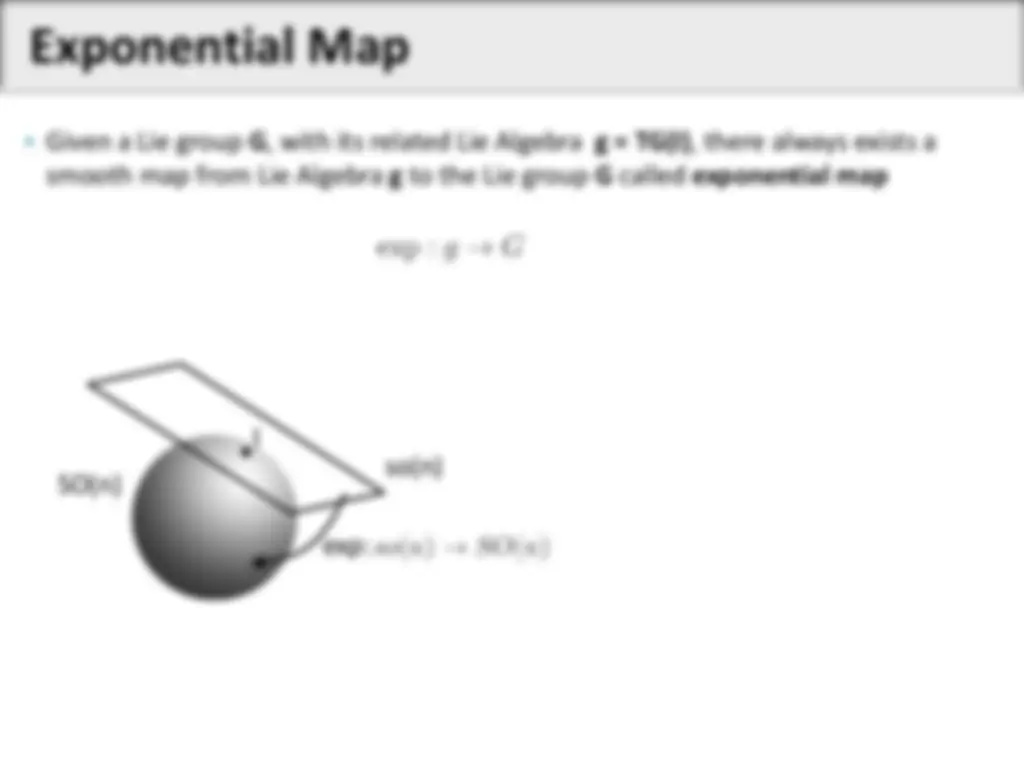
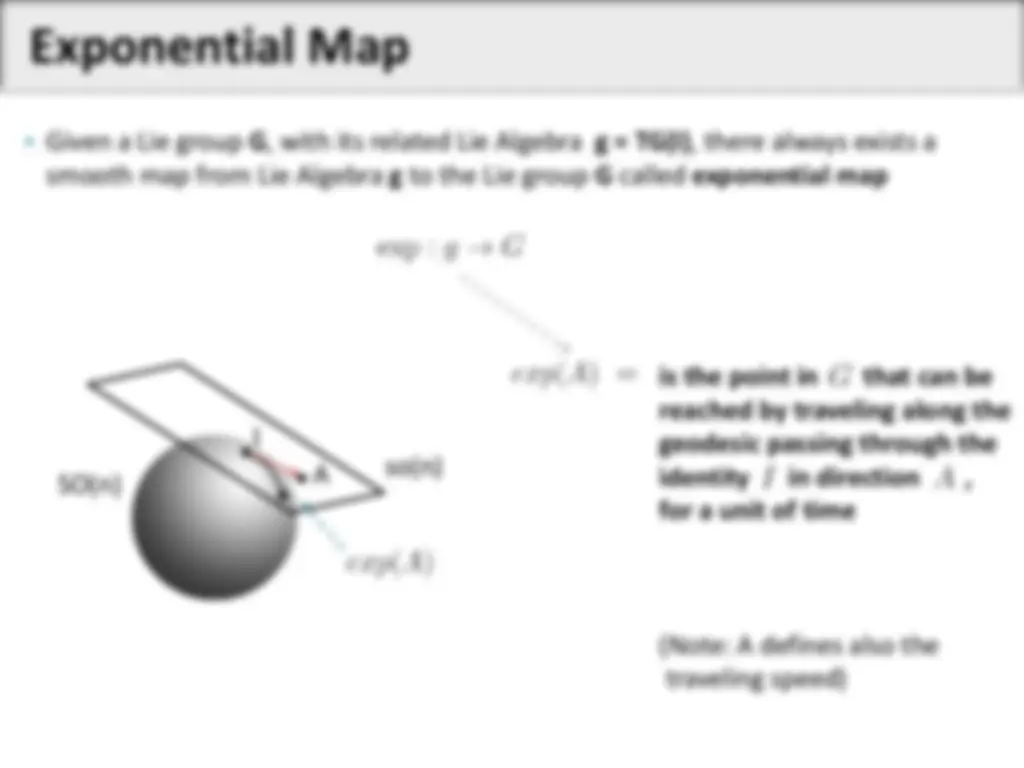
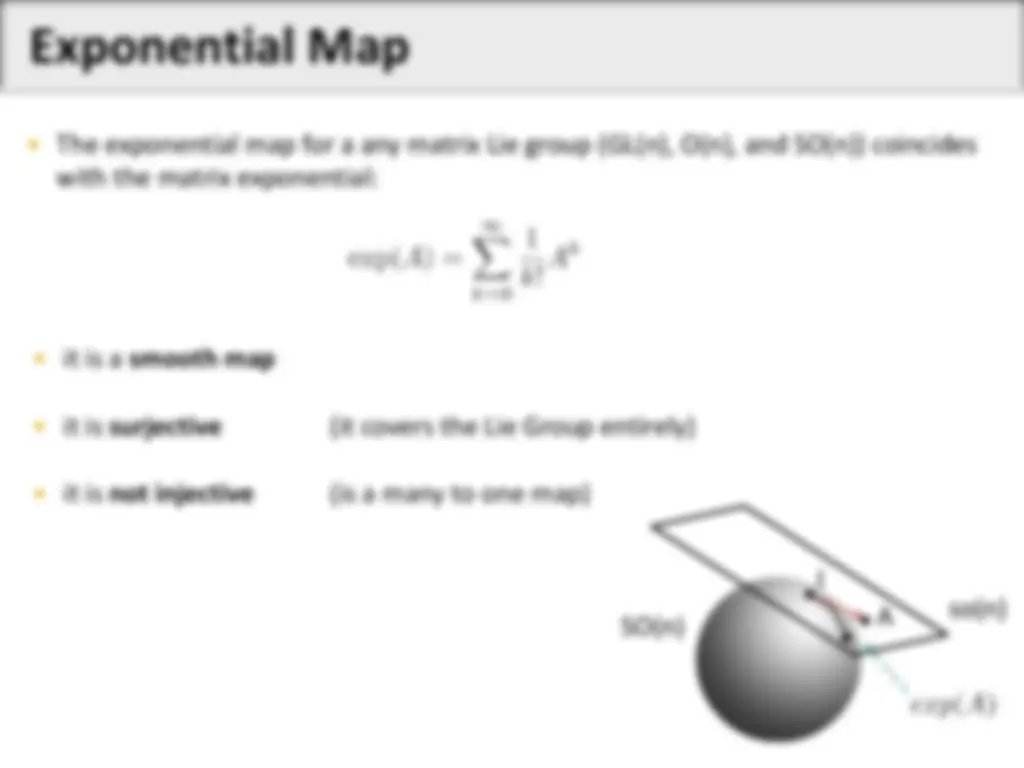
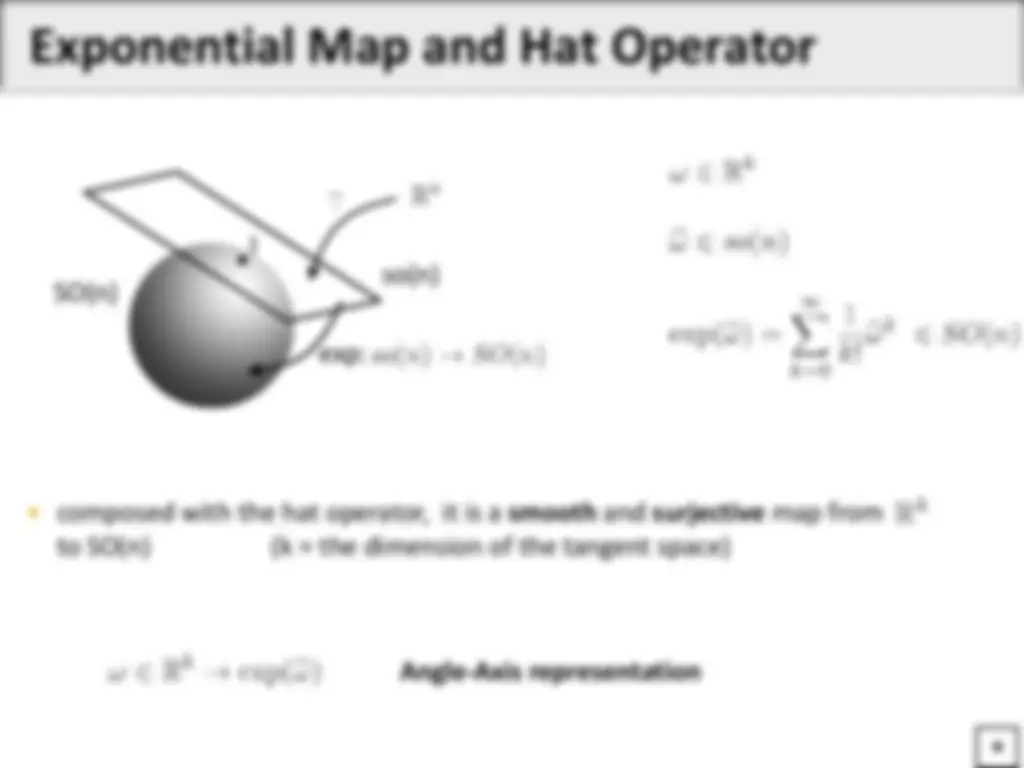
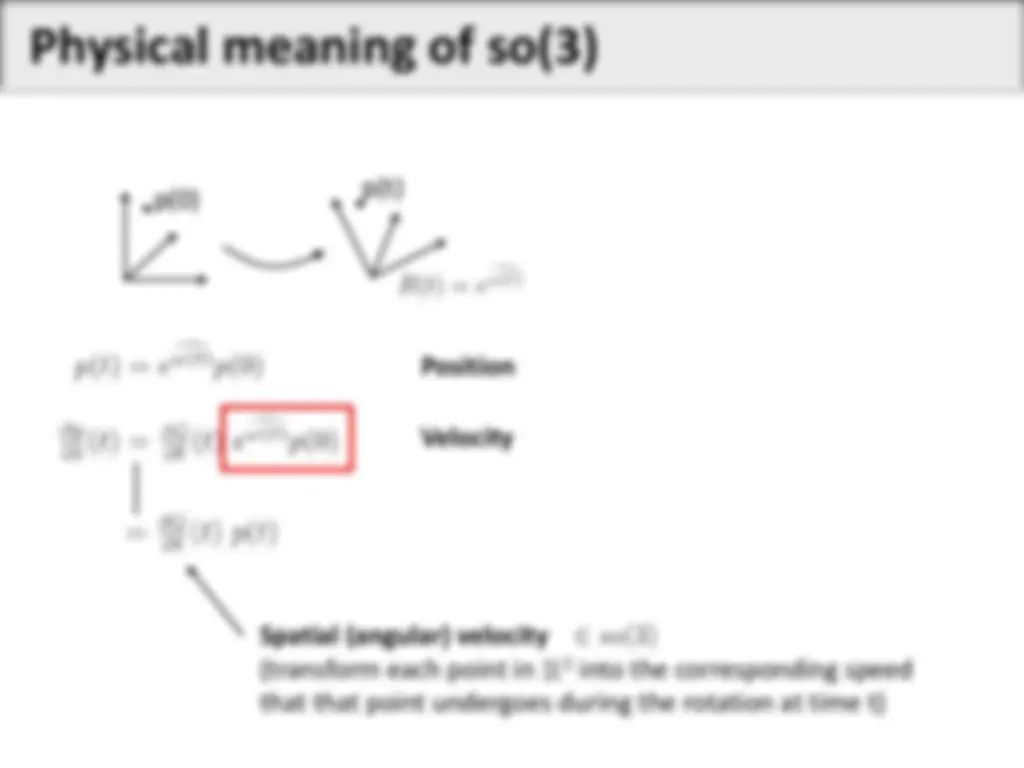
Lie Groups/Lie Algebras
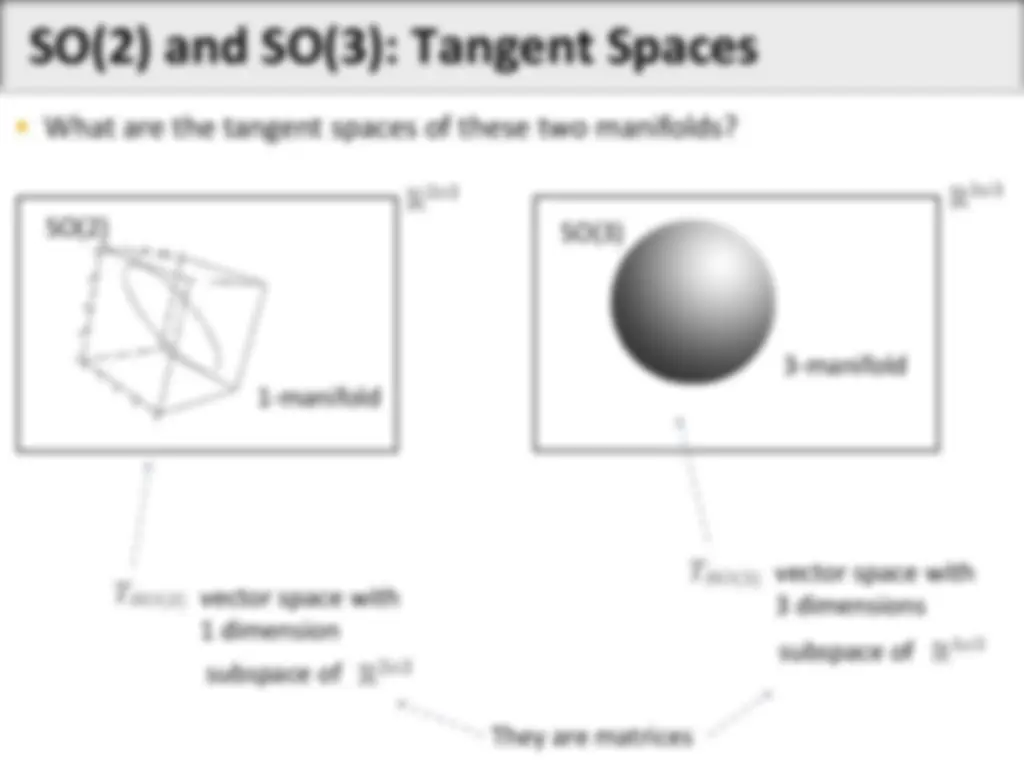
Charts on SO(2) and SO(3)
is a transformation
Affine maps (^) Conformal maps
Isometry
Rigid
Affine + Conformal
Linear
Isometries which does not preserve the orientation
if A is a finite dimensional space (e.g. )
a rigid transformation
can be written as
R orthogonal (isometry) (preserve orientation)
Projective space
Note: in this space, F is also linear
Rotation matrix
Rigid transformations
Matrix Groups
Manifolds
Lie Groups/Lie Algebras
Charts on SO(2) and SO(3)
The set of all the nxn invertible matrices is a group w.r.t. the matrix multiplication
GL(n) is isomorphic to the group of linear and invertible transformations in with the composition as operation
General linear group
It exists an isomorphism , such that
The set of all the nxn orthogonal matrices with determinant equal to 1 is a group w.r.t. the matrix multiplication
SO(n) is isomorphic to the group of linear rigid transformations in with the composition as operation
Special orthogonal group
It exists an isomorphism , such that
Affine maps (^) Conformal maps
Isometry Rigid
Affine + Conformal
Linear
General linear group of order n
GL(n) O(n)
SO(n)
O(n)/SO(n)
= vector space of all the nxn matrices
Orthogonal group of order n
Special orthogonal group of order n Set of orthogonal matrices which do not preserve orientation (not a group)
The Cartesian product is a group w.r.t. a “weird” operation
The “weird” operation is define in such a way that the group SE(n) is isomorphic to the group of rigid transformations in with the composition as operation
It exists an isomorphism , such that
Special Euclidean group
Commutative??
GL(n), O(n), SO(n) and SE(n) are all subset of a vector space
GL(n), O(n), SO(n) and SE(n) are all smooth manifolds (surfaces, curves, solids, etc... immerse in some big vector space)
GL(n) O(n) SO(n) O(n)/SO(n)
SE(n)