


Robot control
Devika Subramanian
Fall 2008
Comp 140
1












Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This document, authored by devika subramanian in fall 2008 for comp 140, covers various aspects of robot control, including sensors (contact, internal, proximity, sonar, visual, and satellite-based), actuators (turn motors and forward/reverse motors), and the sense-decide-act cycle. The document also discusses the operation of sonars and their characteristics, as well as building sensor models and robot actuators.
Typology: Study notes
1 / 24

This page cannot be seen from the preview
Don't miss anything!
(^) Contact sensors (^) bumpers (^) Internal sensors
(^) Proximity sensors
(^) Visual sensors: cameras (^) Satellite-based sensors: GPS
Ultrasonic SRF http://www.robot-electronics.co.uk/htm/srf02tech.htm has the tech specs http://www.robot-electronics.co.uk/htm/sonar_faq.htm has a cool FAQ on sonars
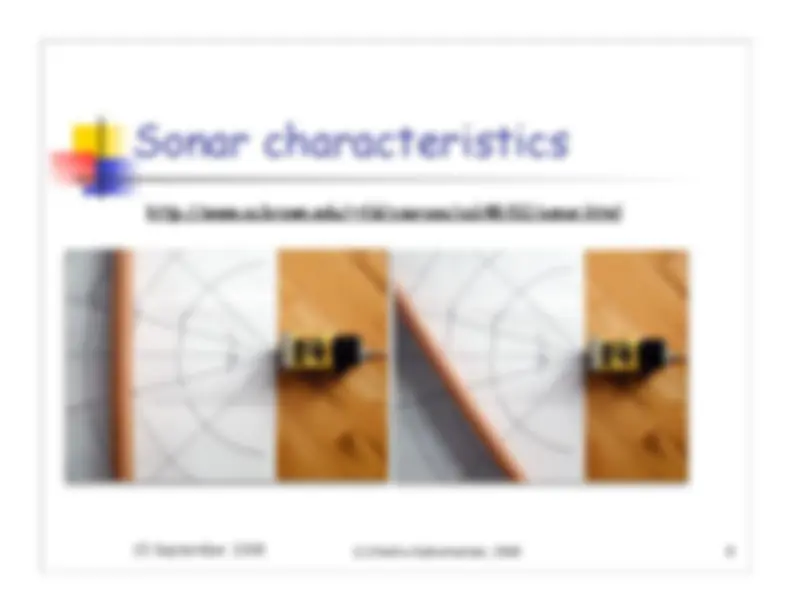
http://www.cs.brown.edu/~tld/courses/cs148/02/sonar.html
http://www.cs.brown.edu/~tld/courses/cs148/02/sonar.html
degree of inclination
0/ 90 180 270 South East West North http://www.robot-electronics.co.uk/htm/cmps3doc.shtml http://www.robot-electronics.co.uk/htm/cmpsqa.shtml
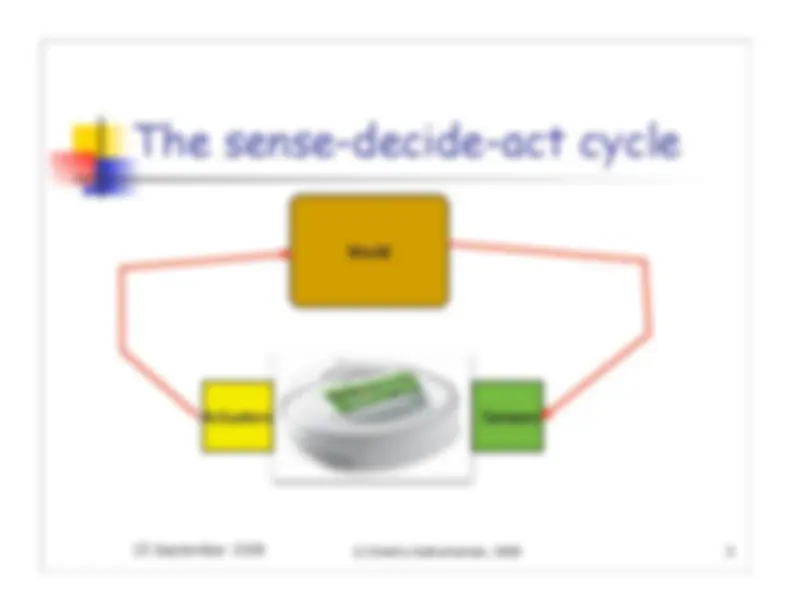
Programming embedded systems Embedded systems interact with the external world, sense it, and take actions to change their world. As the system computes, the world underneath it is changing. Embedded systems work in a sense- decide-act loop.
The inadequacy of fixed plans (^) In the maze world shown in the Markov decision processes example (^) move north by 2 (^) move east by 3 (^) .. is not a robust plan! (^) world responds in a stochastic way to robot’s actions (^) Yet, it is possible for the robot to succeed in the maze world with a policy that gets it to the goal state while avoiding the trap state.
Get robot to within 50 cm of wall (^) Perfect actuation/sensing Let d = current distance to wall (in cm) move(d-50) open loop control
Get robot to within 50 cm of wall Imperfect actuation/perfect sensing Let d = current distance to wall (in cm) while d > 50: move(1) closed loop control sense act Is this program guaranteed to succeed?
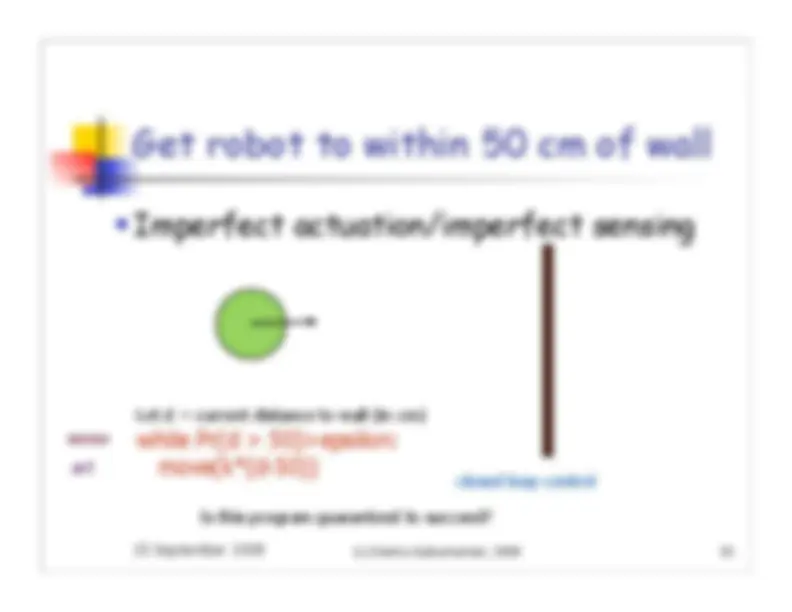
Let d = current distance to wall (in cm)
Get robot to within 50 cm of wall Imperfect actuation/imperfect sensing Let d = current distance to wall (in cm) while Pr(d > 50)>epsilon: move(k*(d-50)) closed loop control sense act Is this program guaranteed to succeed?