Download Lead Compensator Design and Evaluation for 250k Ton Tanker Ship: Root Locus Example and more Assignments Electrical and Electronics Engineering in PDF only on Docsity!
Root Locus Design Example
A. Introduction
The plant model represents a linearization of the heading dynamics of a 250,000 ton tanker ship under empty load conditions. The reference input signal R(s) is the desired heading angle for the ship ψref (s), and the output signal Y (s) is the actual heading (yaw) angle ψ(s). In this example, angles will be expressed in degrees. The input to the plant, U(s), is the commanded rudder angle δr−com(s) that is used to control the heading of the ship. The transfer function for the system is
Gp(s) =
Y (s) U(s)
− 3. 2587 · 10 −^4 (s + 2. 551 · 10 −^2 ) s (s + 0.3333) (s + 5. 3288 · 10 −^2 ) (s + 6. 8624 · 10 −^3 )
ψ(s) δr−com(s)
The gain − 3. 2587 · 10 −^4 , the poles at s = − 5. 3288 · 10 −^2 and s = − 6. 8624 · 10 −^3 , and the zero at s = − 2. 551 · 10 −^2 describe the dynamics of the system between the actual rudder angle and the rate of change in heading angle. The pole at s = 0 provides the integration from the rate of change in heading angle to the heading angle itself. The pole at s = − 0. 3333 models the hydraulic actuator dynamics between the commanded rudder angle δr−com(s) and the actual rudder angle δr(s). The negative sign associated with the gain indicates that a negative rudder angle produces a positive rate of change in heading angle. This is from the usual convention of how a coordinate system is fixed to the ship, a step that is analogous to assigning directions of positive current flow within an electrical circuit. Because of this sign convention used in ship steering, the sign of the compensator gain must also be negative, meaning that a positive heading angle error produces a negative rudder angle.
The performance specifications that are imposed on the system are:
- Percent overshoot to a step input must satisfy P O ≤ 20%;
- Settling time for a step input must satisfy Ts ≤ 200 seconds;
- Steady-state error in the closed-loop ramp response must not exceed 2 degrees.
B. Evaluating Gp(s) Relative to the Specifications
The first step in determining what type of compensation is needed is to evaluate the plant model relative to the specifications. Since the specifications are given in terms of percent overshoot and settling time, root locus will be the design method. Therefore, the desired location of the dominant closed-loop pole s = s 1 must be determined. Since the plant is not second-order, it is not reasonable to assume that the second-order system equations will be valid, so a conservative approach will be used. The values used for percent overshoot and settling time will be
P Odesign =
P Ospec 5
= 4%, Ts−design = 0. 75 × Ts−spec = 150 sec (2)
Using these design values and the equations for second-order systems, the dominant closed-loop pole is calculated to be
ζ =
¯Ln
h P Odesign 100
i¯ ¯ ¯ r π^2 +
Ln
h P Odesign 100
i´ 2 = 0.^7156 (3)
s 1 =
μ 4 Ts−design
×
−1 + j tan
cos−^1 (ζ)
= − 2. 6667 · 10 −^2 + j 2. 6026 · 10 −^2 (4)
Figure 1 shows the root locus and step response plots for the uncompensated system Kc 0 Gp(s) with Kc 0 = − 1. This gain of − 1 is included with the plant at this point so that the positive root locus methods (K > 0) can be used. The actual gains of the final compensator and the plant will be negative. Kc 0 is only used in the evaluation of the uncompensated system. Unity feedback is assumed, so H(s) = 1. The upper right plot in Fig. 1 clearly shows that the root locus does not go through the point s 1 , and the step response plot clearly shows that the overshoot and settling time specifications are not satisfied. Therefore, some form of compensation is needed. The angle of the plant and compensator at s 1 must be computed.
∠Kc 0 Gp (s 1 ) = tan−^1
2. 6026 · 10 −^2 − 0
− 2. 6667 · 10 −^2 − 2. 551 · 10 −^2
− tan−^1
2. 6026 · 10 −^2 − 0
− 2. 6667 · 10 −^2 − 0
tan−^1
2. 6026 · 10 −^2 − 0
− 2. 6667 · 10 −^2 − 0. 3333
− tan−^1
2. 6026 · 10 −^2 − 0
− 2. 6667 · 10 −^2 − 5. 3288 · 10 −^2
tan−^1
2. 6026 · 10 −^2 − 0
− 2. 6667 · 10 −^2 − 6. 8624 · 10 −^3
= − 219. 62 ◦^ ⇒ 140. 38 ◦
∠Gc (s 1 ) = 180 − ∠Kc 0 Gp (s 1 ) = 39. 62 ◦^ (6)
Since the required phase shift of the compensator at s 1 is positive, the compensator will be phase lead.
C. Compensator Designs
1) Overview: The compensator design technique discussed in the text 1 which calculates both the pole and zero angles at s 1 will be used. This requires computing the phase angle of the point s 1 , which is
∠s 1 = tan−^1
2. 6026 · 10 −^2 − 0
2. 6667 · 10 −^2 − 0
= 135. 70 ◦^ (7)
The lead compensator will be designed using this method. Once that design is completed—which hopefully will result in the transient performance specifications being satisfied—the steady-state error of the plant/compensator combination will be checked. If the error is too large, then a special lag compensator will be designed to satisfy that specification. If the transient performance specifications are not satisfied by the lead compensator, several options exist to try and correct the problem. Some of these are shown below.
- Choose another value for s 1 , using either more conservative or less conservative choices for percent overshoot and settling time.
- Choose different locations for the compensator zero and pole.
- Reconfigure the original design into the Proportional+Derivative with Derivative on Output Only (PD-DOO) version.
Only the last option, the PD-DOO configuration, will be used in this example. In general, any or all of these options can be used together to try and obtain a compensator design that satisfies all specifications.
(^1) K. Ogata, Modern Control Engineering , 4th Edition, Prentice Hall, Upper Saddle River, NJ, 2002.
2) Design of the Lead Compensator: Using the method in the text, the phase angles from the com- pensator zero and pole to the point s 1 are computed first, then the distances from the projection of s 1 on the real axis to the zero and pole locations are computed. The angles are
∠ (s 1 + zcd) =
∠s 1 + ∠Gc (s 1 ) 2
= 87. 66 ◦^ (8)
∠ (s 1 + pcd) =
∠s 1 − ∠Gc (s 1 ) 2
= 48. 04 ◦^ (9)
Note that ∠ (s 1 + zcd) − ∠ (s 1 + pcd) = 39. 62 ◦^ = ∠Gc (s 1 ) as required. The distances from s 1 to the zero and pole are
dzcd =
Im [s 1 ] tan (∠ (s 1 + zcd))
2. 6026 · 10 −^2
tan (87. 66 ◦^ · π/180)
= 1. 0635 · 10 −^3 (10)
dpcd =
Im [s 1 ] tan (∠ (s 1 + pcd))
2. 6026 · 10 −^2
tan (48. 04 ◦^ · π/180)
= 2. 3405 · 10 −^2 (11)
Since both of these distances are positive, both the pole and zero of the lead compensator are to the left of s 1. The zero is located at s = − 2. 773 · 10 −^2 , and the pole is located at s = − 5. 0071 · 10 −^2. At this point in the design, the lead compensator is
Gc−Lead(s) =
Kc (s + 2. 773 · 10 −^2 ) (s + 5. 0071 · 10 −^2 )
Now that the lead compensator’s pole and zero have been placed to satisfy the root locus phase angle criterion, the gain must be computed to satisfy the magnitude criterion at s 1. The gain is
|Kc| =
|s 1 + 5. 0071 · 10 −^2 | · |s 1 | · |s 1 + 0. 3333 | · |s 1 + 5. 3288 · 10 −^2 | · |s 1 + 6. 8624 · 10 −^3 | |s 1 + 2. 773 · 10 −^2 | · |− 3. 2587 · 10 −^4 | · |s 1 + 2. 551 · 10 −^2 | |Kc| = 2. 2099 ⇒ Kc = − 2. 2099 (13)
Note that the sign on the gain is negative. The forward path transfer function is now
Gc−Lead(s)Gp(s) =
- 2015 · 10 −^4 (s + 2. 551 · 10 −^2 ) (s + 2. 773 · 10 −^2 ) s (s + 0.3333) (s + 5. 3288 · 10 −^2 ) (s + 5. 0071 · 10 −^2 ) (s + 6. 8624 · 10 −^3 )
D. Evaluation of the Design
The design will be evaluated by examining the step response of the lead-compensated system. The total forward transfer function is given in (14). The root locus and step response plots are shown in Fig. 2. The root locus plot shows that the point s 1 is on the root locus as it should be. The closed-loop poles are located at s = − 2. 6667 · 10 −^2 ± j 2. 6026 · 10 −^2 , s = − 2. 4707 · 10 −^2 ± j 2. 1592 · 10 −^2 , and s = − 0. 34077. The step response plot shows that neither of the transient performance specifications has been satisfied. The overshoot of approximately 30% is not acceptable, and the settling time of 230 seconds is too long. The various options that may be used to try and correct this problem were mentioned earlier. The only option that will be described in this example is the Proportional+Derivative (PD) form of the compensator with the Derivative on Output Only (PD-DOO) configuration. The steady-state error of this system for a ramp input is
ess =
Kv
lims→ 0 [s · Gc−Lead(s)Gp(s)]
so a special lag compensator would be needed in order to satisfy that specification. However, before that is done, the transient response specifications need to be satisfied. There is no point in designing the special lag compensator until the transient performance is satisfactory.
E. PD Compensator with Derivative on Output Only
The gains and time constant of the Proportional+Derivative (PD) controller are
τ =
pcd
, Kp = |Kc| ·
zcd pcd
, Kd = (|Kc| − Kp) τ (16)
and the values are τ = 19. 971 sec, Kp = 1. 2239 , and Kd = 19. 693 , so if the PD compensator was to be placed in series with the plant it would be
Gc−P D(s) = −
- 693 s
- 971 s + 1
where the negative sign in Gc−P D(s) is required since the controller gain is negative. The PD-DOO configuration is
GDOO(s) = Kp ·
[−Gp(s)]
1 + [−Gp(s)] ·
Kds τ s + 1
- 988 · 10 −^4 (s + 5. 007 · 10 −^2 ) (s + 2. 551 · 10 −^2 ) s (s + 3. 37 · 10 −^1 ) (s + 1. 482 · 10 −^2 ) (s + 4. 584 · 10 −^2 ± j 2. 761 · 10 −^2 )
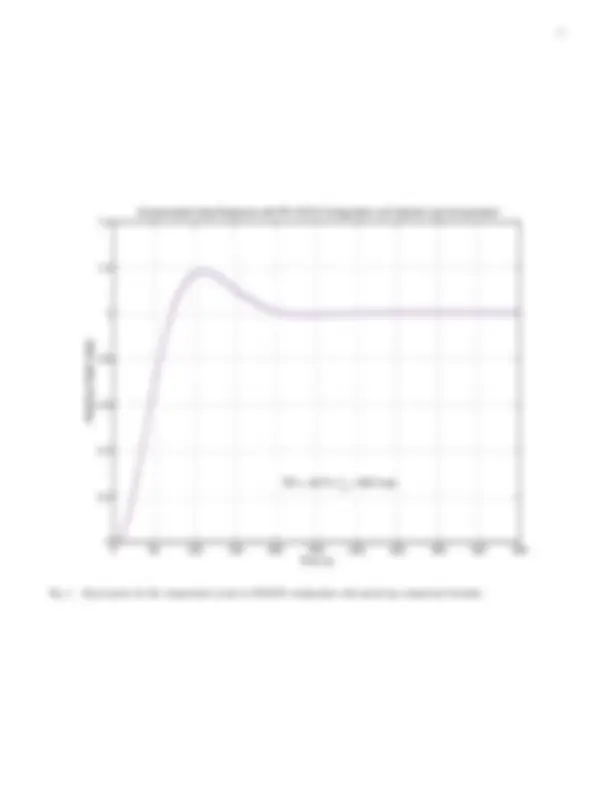
where the negative sign of the compensator is now included with the plant transfer function. The step response of the system with the PD-DOO configuration is shown in Fig. 3. Both the percent overshoot and the settling time satisfy the transient response specifications. The steady-state error specification does have to be checked to see if a special lag compensator is needed.
F. Design of the Special Lag Compensator
The steady-state error for a ramp input with the PD-DOO configuration 1 / lims→ 0 [sGDOO(s)] = 28. 07 (increased from 11. 98 by the change in configurations), and the specified value is 2. Therefore, the error must be reduced by a factor of
αg =
ess−actual ess−spec
zcg pcg
This value for αg reduces the steady-state error to the correct value by separating the special lag’s pole and zero by the same factor. Using the rule of thumb discussed in class, the compensator zero is placed to the right of s 1 by a factor of 100 , and as always pcg = zcg/αg, so the special lag compensator is
Gc−Spec−Lag(s) =
(s + 2. 6667 · 10 −^4 ) (s + 1. 9 · 10 −^5 )
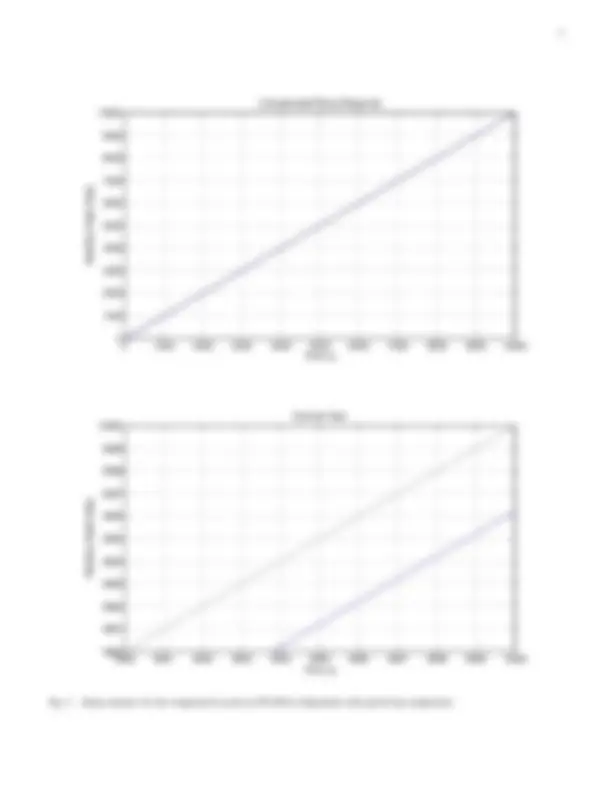
The step response is shown in Fig. 4. The overshoot and settling time are both very close to the values in Fig. 3, and they still satisfy the specifications. Therefore, the special lag compensator did not disturb the transient response very much. The ramp response of the final version of the compensated system is shown in Fig. 5. The graph illustrates the very long time that it might take for the ramp response to settle to essentially a constant slope. At t = 10000 seconds, the error is still larger than 3 ◦. Even though it taking a long time to reach steady-state with the ramp response, the steady-state error does have the correct value after the special lag compensator is included.
0 50 100 150 200 250 300 350 400 450 500
0
1
Time (s)
Heading Angle (deg)
Compensated Step Response with PD−DOO Configuration
PO = 17.6%, Ts = 186.5 sec
Fig. 3. Step response for the compensated system in the PD-DOO configuration.
0 50 100 150 200 250 300 350 400 450 500
0
1
Time (s)
Heading Angle (deg)
Compensated Step Response with PD−DOO Configuration and Special Lag Compensator
PO = 18.7%, Ts = 192.3 sec
Fig. 4. Step response for the compensated system in PD-DOO configuration with special lag compensator included.