



Rotational Dynamics
docsity.com

Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This course is for everyone who want to learn something about universe. This course is part of every science field curriculum. This lecture has following keywords: Rorational Dynamics, Newton's Firt Law, Angular Acceleraion, Torque, Inertia, Disks and Cylinders, Parallel Axis Theorem, Rotainal Kinetic Energy
Typology: Slides
1 / 14

This page cannot be seen from the preview
Don't miss anything!
Rotational Dynamics
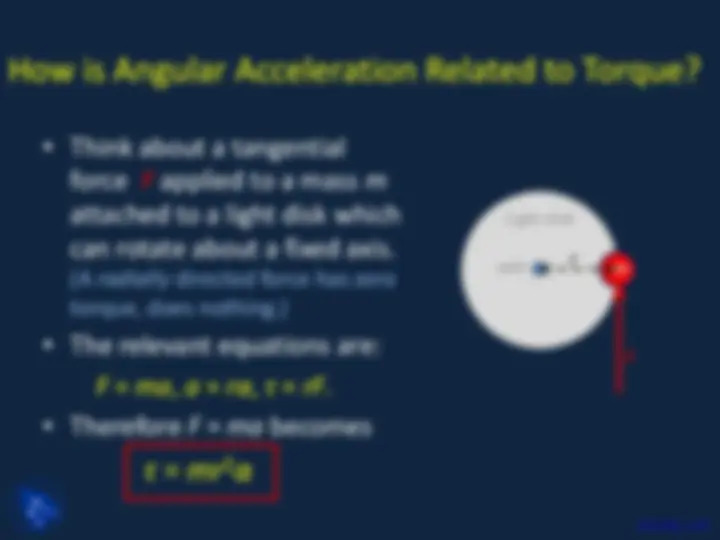
Newton’s Second Law for Rotations
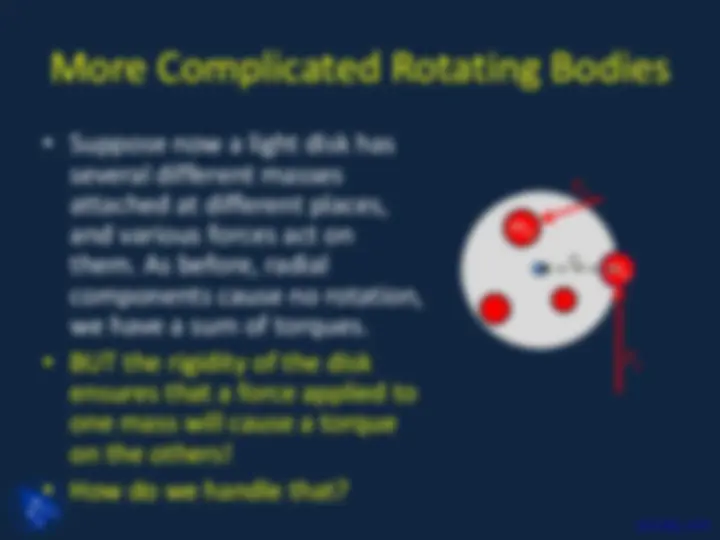
More Complicated Rotating Bodies
F 1
r (^1) m 1
m 2
F 2
ext int 2
Δ mi
ext 2 i i i i i
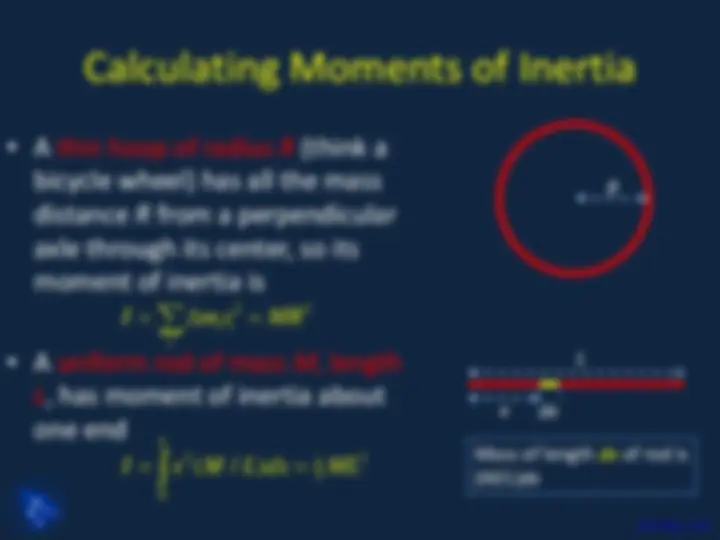
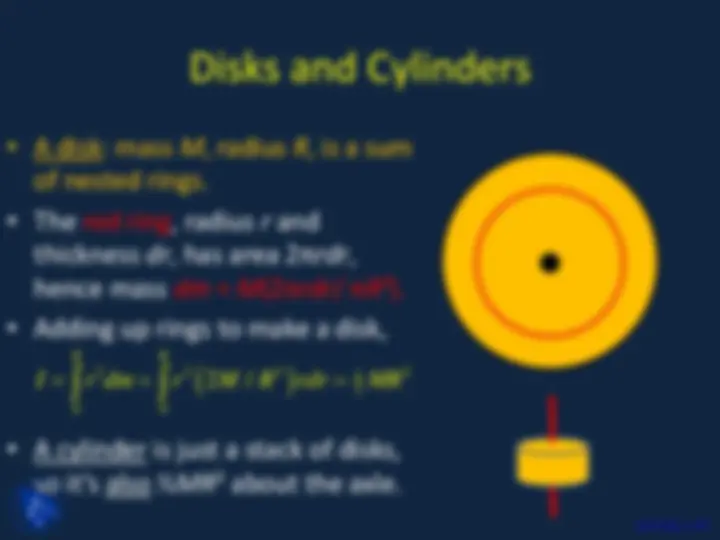
Calculating Moments of Inertia
2 2 i i i
2 1 2 3 0
( / )
L
R
x
L
Mass of length dx of rod is ( M / L ) dx
dx
CM at O
dmi
y
x
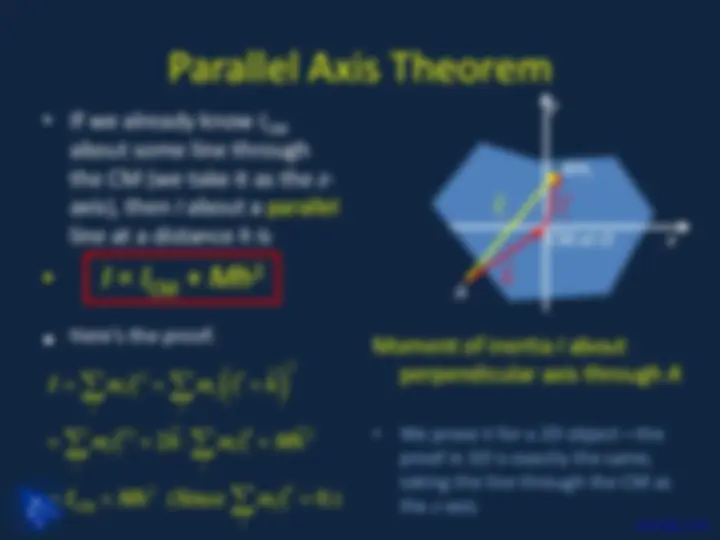
A h
r i ri ′
2 2
2 2
CM^2
2
(Since 0.)
i i^ i^ i i^ i
i i^ i^ i i^ i
i i^ i
I m r m r h
m r h m r Mh
I Mh m r
= = ′+
= ′^ + ⋅ ′+
= + ′ =
^
^
Clicker Question
We found the moment of inertia of a rod about a perpendicular line through one end was. Use the parallel axis theorem to figure out what it is about a perpendicular line through the center of the rod.
1 2 3 ML
1 2 3 ML 7 2 12 ML 1 2 2 ML 1 2 4 ML 1 2 12 ML
Clicker Question
Given that the moment of inertia of a disk about its axle is , use the perpendicular axis theorem to find the moment of inertia of a disk about a line through its center and in its plane.
1 2 2 MR
1 2 2 MR 1 2 4 MR MR^2
Rotational Kinetic Energy
( (^12) i i^2 )^2 i
K = (^) ∑ m r ω = I ω