









































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Slide that présent the bivingin of subdivision
Typology: Slides
1 / 68

This page cannot be seen from the preview
Don't miss anything!
(^1) Idée de Subdivision(diviser pour contrôler)
(^2) La convergence et la régularité de subdivision
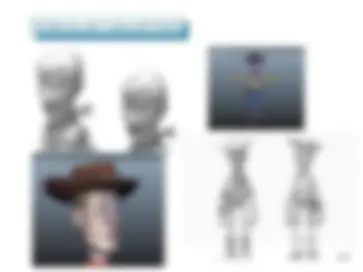
(^3) Subdivision Surfaces
(^4) Expériences Numériques
(^5) Conclusion
(^1) Idée de Subdivision(diviser pour contrôler)
(^2) La convergence et la régularité de subdivision
(^3) Subdivision Surfaces
(^4) Expériences Numériques
(^5) Conclusion
(^1) Idée de Subdivision(diviser pour contrôler)
(^2) La convergence et la régularité de subdivision
(^3) Subdivision Surfaces
(^4) Expériences Numériques
(^5) Conclusion
(^1) Idée de Subdivision(diviser pour contrôler)
(^2) La convergence et la régularité de subdivision
(^3) Subdivision Surfaces
(^4) Expériences Numériques
(^5) Conclusion
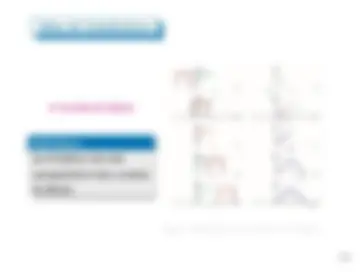
- Courbes de Bézier:
Les courbes de Bézier sont défini par :
p ( t ) =
Bi ( t ) pi Figure: Courbe élémentaire de Bézier et son polygone de contrôle.
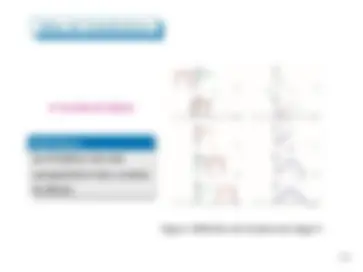
- Courbes B-Spline:
Les B-Spline sont des juxtapositions des courbes de Bézier.
Figure: Définition de B-spline de degré 1
- Courbes B-Spline:
Les B-Spline sont des juxtapositions des courbes de Bézier.
Figure: Définition de B-spline de degré 1
Une courbe B-spline a la forme :
C ( t ) =
i
PiBm ( t − i ) (1)
avec Pi les points de cotrôl ,et Bm une B-spline de degré m. C ( t ) dans ( 1 ) est la représentation paramétrique:
C ( t ) =
i
P^0 i Bm ( t − i ) =
(^) i P^1 i Bm ( 2 t − i ) = · · · = ∑︀ i Pki Bm ( 2 kt − i ) = · · · , (2)
où Pl i +^1 =
j
ai − 2 jPlj (3)
Une courbe B-spline a la forme :
C ( t ) =
i
PiBm ( t − i ) (1)
avec Pi les points de cotrôl ,et Bm une B-spline de degré m. C ( t ) dans ( 1 ) est la représentation paramétrique:
C ( t ) =
i
P^0 i Bm ( t − i ) =
(^) i P^1 i Bm ( 2 t − i ) = · · · = ∑︀ i Pki Bm ( 2 kt − i ) = · · · , (2)
où Pl i +^1 =
j
ai − 2 jPlj (3)
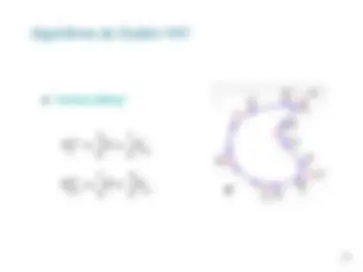
"corner cutting "
Pk 2 + i^1 =
Pki +
Pki + 1
Pk 2 + i +^11 =
Pki +
Pki + 1
"corner cutting "
Pk 2 + i^1 =
Pki +
Pki + 1
Pk 2 + i +^11 =
Pki +
Pki + 1