Download Simple Pendulum-Stochastic Process-Lecture Slides and more Slides Stochastic Processes in PDF only on Docsity!
A simple Pendulum A a mass
m
is attached to a rigid rod and the mass is at distance
L
from the
frictionless pivot. The system moves in a plane. The motion of is governed bythe equation for torque:
a(t)
I
d^ dt
mL
sin
mgL
2 2
2
θ
θ =
where,
(t),
is the torque around the pivot point;
I
is the moment of inertia about the pivot point, and
a(t)
is the angular acceleration.
We use
as a angular displacement;
v(t)
as its time rate of
change, and
a(t)
as the second derivative of
(t).
Then torque is
mgLsin
with
I
= mL
2
The model equation is then
docsity.com
Physical Pendulum
L
g
s
m
g
g L
dt d
/
/
8 .
9
sin
=
Ω
=
−
=
θ
θ
This equation can be simplified by dividing by
mL
Also, choose
L = 9.8 m
θ
θ
sin
2 2
−
=
d^ dt
docsity.com
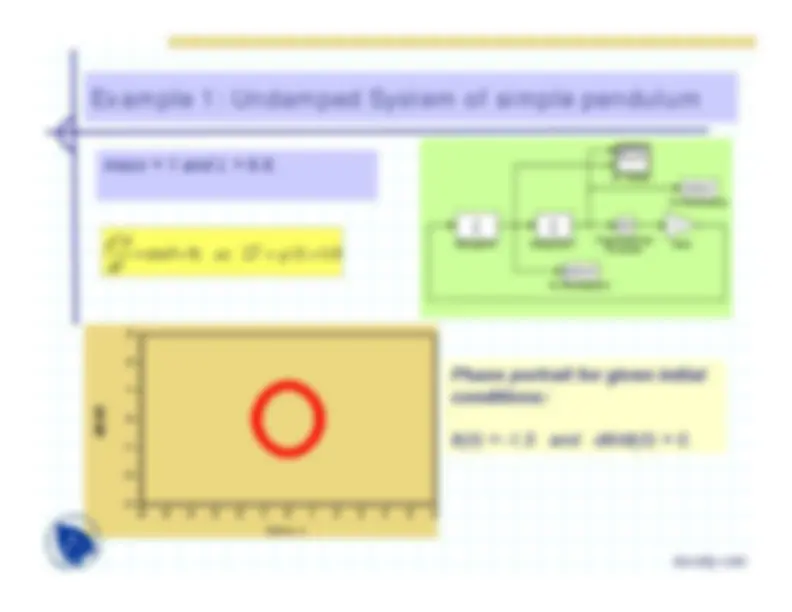
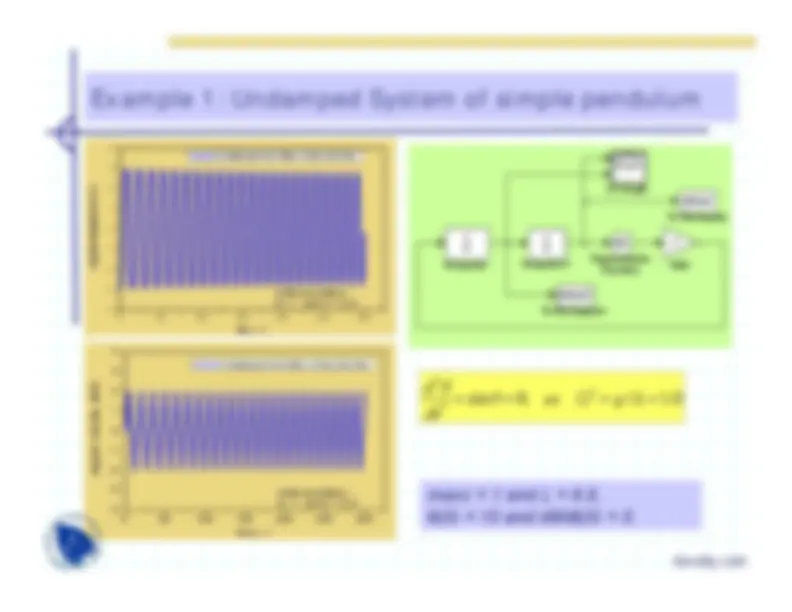
mass = 1 and L = 9.8, θ
(0) = 10 and d
θ
/dt(0) = 0.
Example 1: Undamped System of simple pendulum
0
5 0
1 0 0
1 5 0
2 0 0
2 5 0
3 0 0
(^43210) - 1 - 2 - 3 - 4
θ angular displacement,
tim e , t
u n d a m p e d m o tio n o f p e n d u lu m
in itia l c o n d itio n s : θ = − 3.
a n d
θ ' = 0.
XY Graph
sin
Trigonometric
Function
simout
To Workspace
simout
To Workspace
1 s
Integrator
1 s
Integrator
-1 Gain
0
5 0
1 0 0
1 5 0
2 0 0
2 5 0
3 0 0
-1 -2 -3 - 4 3 2 1 0
dtθ/ angular velocity, d
tim e , t
u n d a m p e d m o tio n o f p e n d u lu m
in itia l c o n d itio n s : θ = − 3.
a n d
θ ' = 0.
sin
2
2 2
L
g
as
d dt
θ
θ
docsity.com
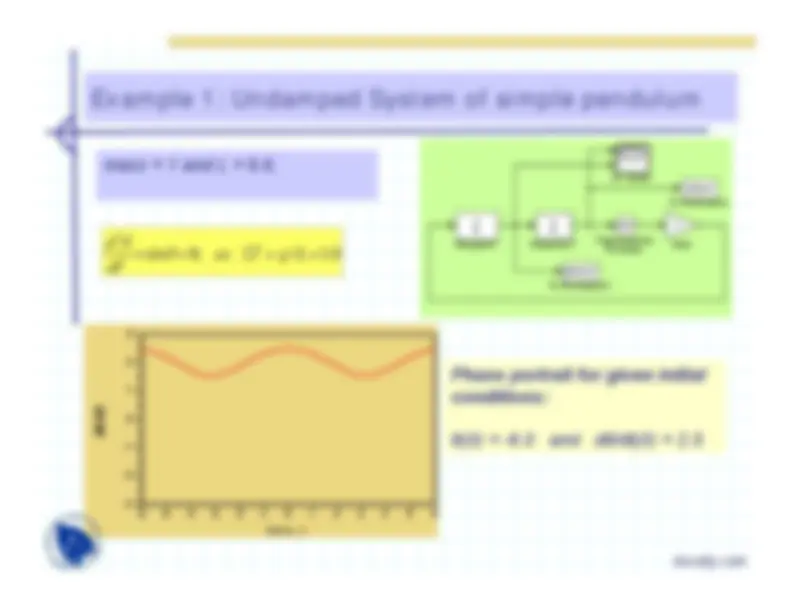
mass = 1 and L = 9.8,
Example 1: Undamped System of simple pendulum
0 . 1
/
; 0
sin
2
2 2
=
=
Ω
=
L
g
as
d dt
θ
θ
XY Graph
sin
Trigonome tric
Function
simout
To Workspace 1
simout
To Workspace
1 s
Integrator
1 s
Inte grator
-1 Gain
0
1
2
3
4
5
6
3 2 1 0
/dtθd
t im e , t
Phase portrait for given initialconditions: θ
and
d
θ
/dt(0) = 0.
docsity.com
mass = 1 and L = 9.8,
Example 1: Undamped System of simple pendulum
0 . 1
/
; 0
sin
2
2 2
=
=
Ω
=
L
g
as
d dt
θ
θ
XY Graph
sin
Trigonome tric
Function
simout
To Workspace 1
simout
To Workspace
1 s
Integrator
1 s
Inte grator
-1 Gain
0
1
2
3
4
5
6
2 1 0
/dtθd
t im e , t
Phase portrait for given initialconditions: θ
and
d
θ
/dt(0) = 0.
docsity.com
mass = 1 and L = 9.8,
Example 1: Undamped System of simple pendulum
0 . 1
/
; 0
sin
2
2 2
=
=
Ω
=
L
g
as
d dt
θ
θ
XY Graph
sin
Trigonome tric
Function
simout
To Workspace 1
simout
To Workspace
1 s
Integrator
1 s
Inte grator
-1 Gain
0
1
2
3
4
5
6
3 2 1 0
/dtθd
t im e , t
Phase portrait for given initialconditions: θ
and
d
θ
/dt(0) = 2.
docsity.com
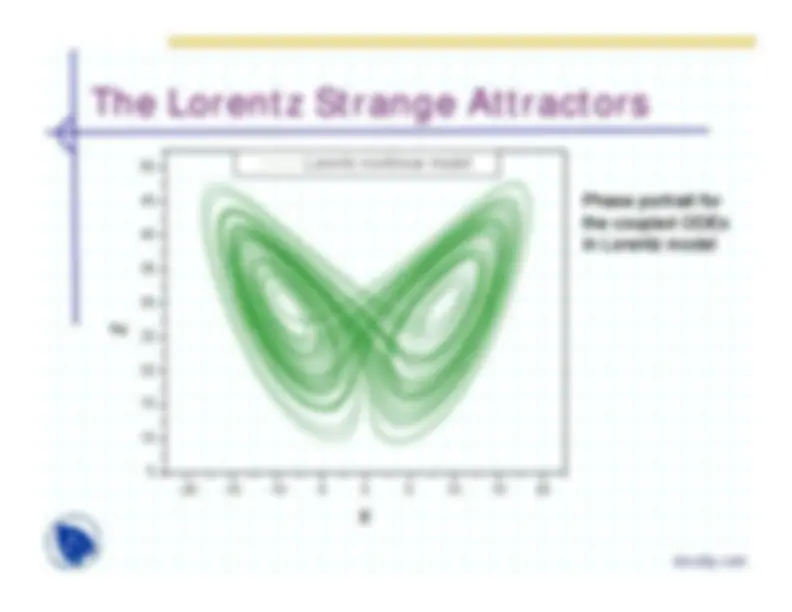
The Lorentz Strange Attractors
Phase space can have
fixed points
(x, v)
such that they satisfy the
model (as
f(x, v) = 0
and
g(x, v) = 0).
This corresponds to steady state.
The set of points in the phase space are identified as
orbit or trajectory
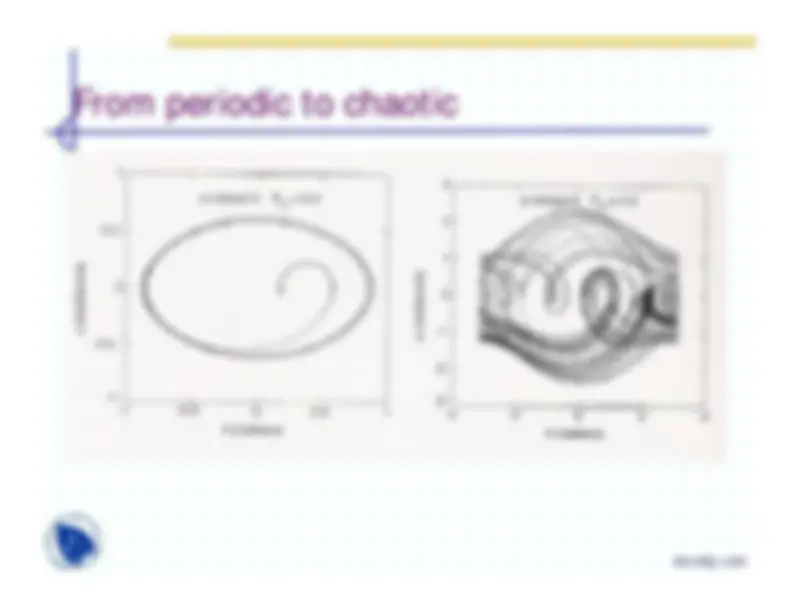
If the set of points in the simulation repeat itself after some time
(T),
then the orbit is said to be
periodic
that is
x(t + T) = x(t)
. The orbit of
mass-spring system in a friction free environment is an ellipse in phasespace. A closed curve is called a
limit cycle
in phase space towards which an
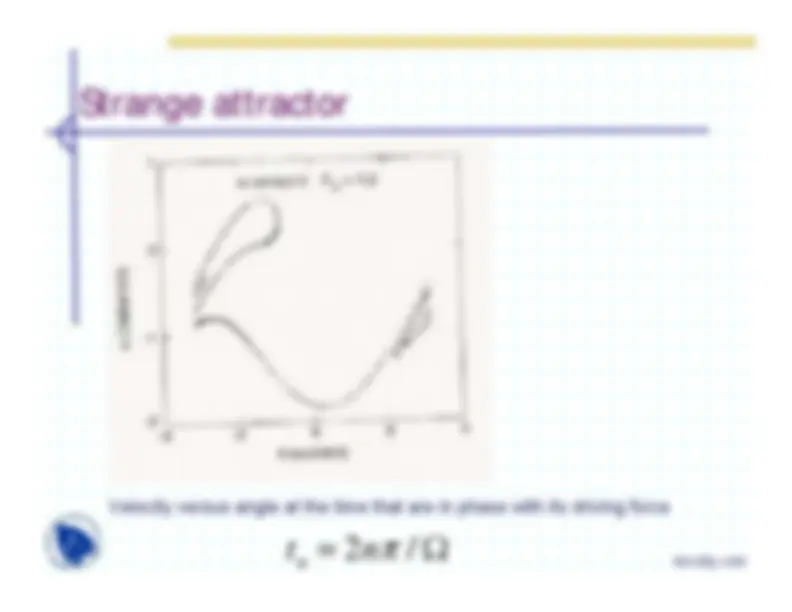
orbit evolves as time goes to large values. It has property that all othercurves move towards it or away from it. When all the neighboring trajectories are going towards the limit cycle it iscalled a stable or
attracting cycle
, otherwise it is an unstable or repelling
one.
Then orbit is called attractor.
docsity.com
The Lorentz Strange Attractors
Phase space can have
fixed points
(x, v)
such that they satisfy the
model (as
f(x, v) = 0
and
g(x, v) = 0).
This corresponds to steady state.
The set of points in the phase space are identified as
orbit or trajectory
If the set of points in the simulation repeat itself after some time
(T),
then the orbit is said to be
periodic
that is
x(t + T) = x(t)
. The orbit of
mass-spring system in a friction free environment is an ellipse in phasespace. A closed curve is called a
limit cycle
in phase space towards which an
orbit evolves as time goes to large values. It has property that all othercurves move towards it or away from it. When all the neighboring trajectories are going towards the limit cycle it iscalled a stable or
attracting cycle
, otherwise it is an unstable or repelling
one.
Then orbit is called attractor.
docsity.com
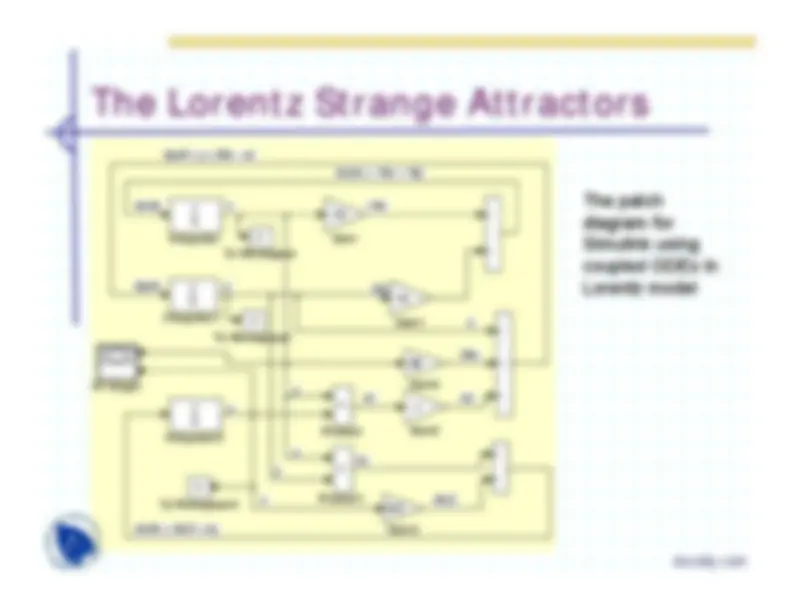
The Lorentz Strange Attractors The model equations are
t
y
t
x
dx dt
σ
t ( y ) t ( x r ) t ( z ) t ( x
dy dt
) ( ) ( ) ( t z b t y t x
dz dt
−
=
Let us use Simulink
for coupled ODEs
and trace the projection on xz-plane
with parameter values,
b
= 10, and
r
= 28. The initial values are
x(0)
y(0)
= 5., and
z(0)
= 25. The resulting solutions are illustrated as
Figures.
docsity.com
The Lorentz Strange Attractors
x
dx/dt
-10x
10y
y
dx/dt = -10x + 10y
z
x
xz
28x -xz
y
dy/dt
dy/dt = y + 28x - xz
x
y
xy
z
-8z/
dz/dt = -8z/3 + xy
XY Graph
z
To Workspace
y
To Workspace
x
To Workspace
Product Product
1 s
Integrator
1 s
Integrator
1 s
Integrator
-8/3Gain
28 Gain3-1 Gain
10 Gain
-10 Gain
The patchdiagram forSimulink
using
coupled ODEs
in
Lorentz
model
docsity.com
Pendulum with damping
dt d
C
dt d
θ
θ
θ
−
−
=
sin
2
2
The
damped
pendulum
is
an
example
of
a
dissipative
system
because energy is being lost to the surroundings. A term
Cv(t)
is
used on the right-hand side of the equation of motion to take intoaccount the air resistance. The equation for the angular accelerationbecomes Where,
mass is unity
and
g/L = 1.
Let us make a patch diagram for MATLAB/Simulink.
The results
of simulation in terms of phase diagram are shown in Figure. At time t = zero, the pendulum is given a clockwise swing from aninitial angle of 3
and various initial velocities.
docsity.com
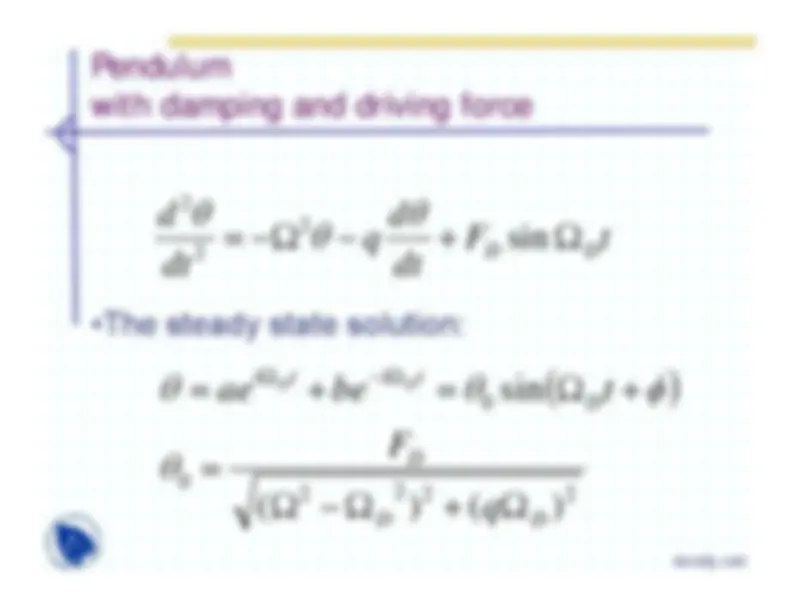
Pendulum with damping
dt d
q
dt d
θ
θ
θ
−
Ω
−
=
2
2
2
The underdamped
case:
The overdamped
case
The critical case:
4 /
4 /
4 /
2
2
2
2
2
2
q q q
=
Ω
<
Ω
Ω
s
l
s
m
g
/
13 .
3
1 ; / 8. 9
2
=
Ω
=
=
docsity.com
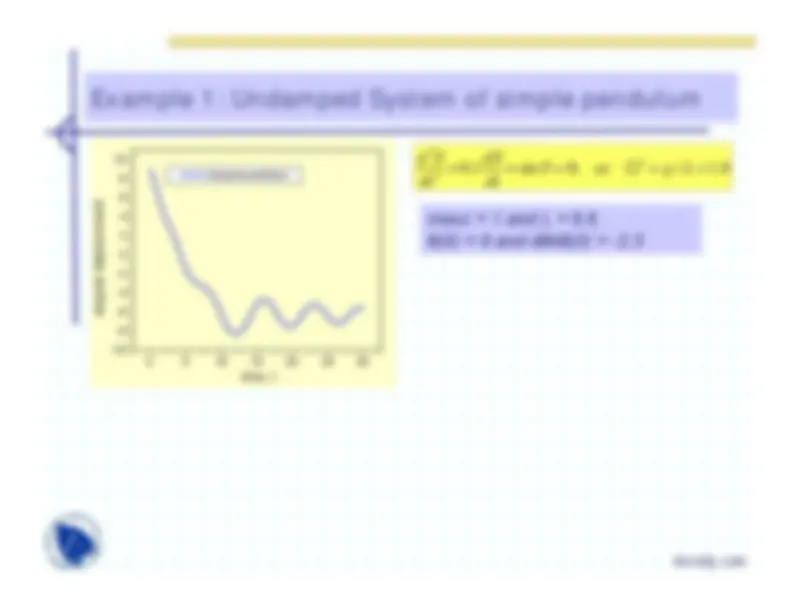
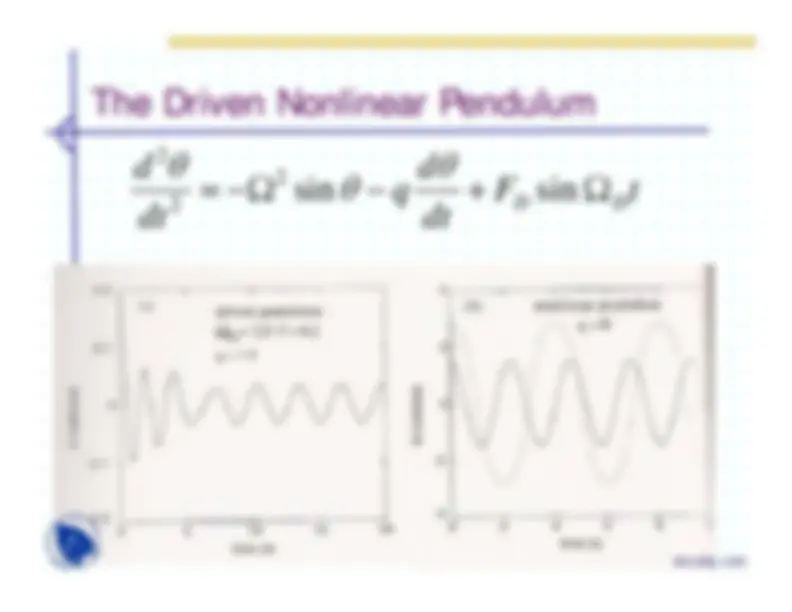
mass = 1 and L = 9.8, θ
(0) = 9 and d
θ
/dt(0) = -2.
Example 1: Undamped System of simple pendulum
0 . 1
/
; 0
sin
1 . 0
2
2 2
= = Ω = + +
L
g
as
d dt
d dt
θ
θ
θ
0
5
10
15
20
25
30
10 8 6 4 2 0 -2 -4 -6 - angular displacement
time, t
damped pendulum
docsity.com
Solution of Damped Pendulum
t
i
e
Trial Solution:
q
iq
q
q
iq iq
Special case: critical point
docsity.com