



The Simplex Method
The most popular method for solving
Linear Programming Problems
We shall present it as an
Algorithm
Docsity.com





Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
These are the important key points of lecture slides of Introduction to Operations Research are:Simplex Method, General Structure of Algorithms, Extreme Point, Missing Details, Optimality Test, Functional Equality, Standard Form, Canonical Form, Slack Variable, Feasible Extreme Point
Typology: Slides
1 / 13

This page cannot be seen from the preview
Don't miss anything!
The most popular method for solving
Linear Programming Problems
We shall present it as an
Initialise
Perform a sequence of repetitive steps
Check for desired results
Stop
No
Yes
Iterate
Missing Details
Initialisation :
Optimality Test :
Iteration :
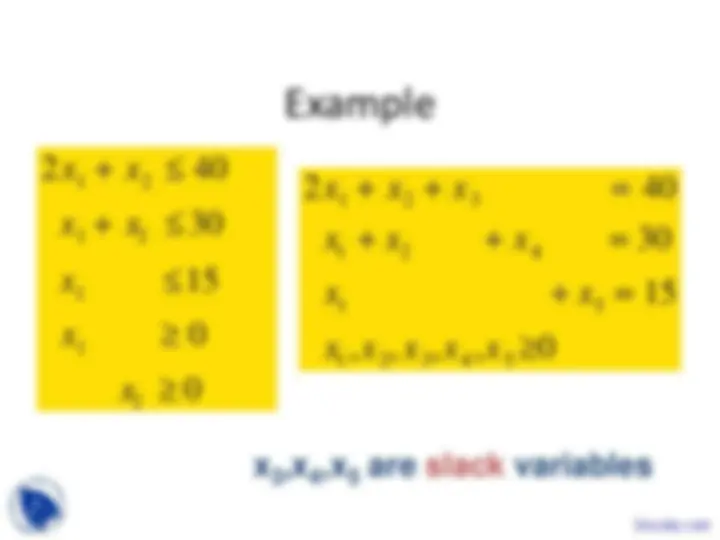
5.1 initialisation
Transform the LP problem given in a standard
form into a canonical form.
This involves the introduction of slack
variables , one for each functional constraint.
Thus if we start with n variables and m
functional constraints, we end up with n+m variables and m functional equality constraints.
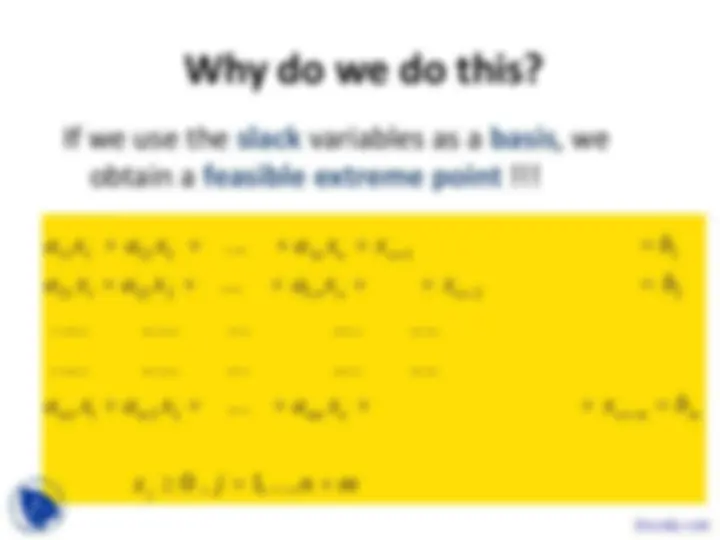
a 11 x 1 + a 12 x 2 + ... + a 1 n xn + x (^) n + 1 = b 1
a 21 x 1 + a 22 x 2 + ... + a 2 n x (^) n + + xn + 2 = b 2
..... ..... ... .... .... ..... ..... ... .... ....
a (^) m 1 x 1 + am 2 x 2 + ... + amn xn + + x (^) n + m = b (^) m
x (^) j ≥ 0 , j = 1,..., n + m
max z = c (^) j j = 1
n ∑ x^ j
Observation
The i-th slack variable measure the “distance” of the point x=(x 1 ,...,x (^) n ) from the hyperplane defining the i-th constraint (This is not a Euclidean distance).
Thus, if the i-th slack variable is equal to zero the point x= (x 1 ,...,x (^) n ) is on the i-th hyperplane. Otherwise it is not.
The original variables “measure” the distance to the hyperplanes defining the respective non-negativity constraints.
a 11 x 1 + a 12 x 2 + ... + a 1 n xn + x (^) n + 1 = b 1
a 21 x 1 + a 22 x 2 + ... + a 2 n x (^) n + + xn + 2 = b 2
..... ..... ... .... .... ..... ..... ... .... ....
a (^) m 1 x 1 + am 2 x 2 + ... + amn xn + + x (^) n + m = b (^) m
x (^) j ≥ 0 , j = 1,..., n + m