



Slope‐Deflection Method
Theory of Structures‐II
M Shahid Mehmood
Department of Civil Engineering
Swedish College of Engineering & Technology, Wah Cantt



















































































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
When a continuous beam or a frame is subjected to external loads, internal moments generally develop at the ends of its individual members. “The slope‐ ...
Typology: Lecture notes
1 / 97

This page cannot be seen from the preview
Don't miss anything!
Theory of Structures‐II^ M Shahid Mehmood Department of Civil Engineering Swedish College^ of Engineering & Technology,
Wah Cantt
2
4
5 A^ BL
P w A L B w M AB
M^ BA
-^ Double‐subscript notation is used for member end moments, withp^
the first subscript identifying the member end at which themoment acts and the second subscript indicating the other end ofthe memberthe member. • Mdenotes the moment at end A of the member AB.AB^ AB • MBAdenotes the moment at end B of the member AB.^
7
Pw (^) M AB M^ BA L A^
B AB Un‐deformed position^
Tangent at ABA Elastic curveElastic curveB’ θA θB A’ Tangent at B
-^ θ&^ θdenote,^ respectively,A^ B^
the^ rotations^ of^ end^ A^ and^ B
with θ&^ θdenote,^ respectively,^ A^ B^
the^ rotations^ of^ end^ A^ and^ B^
with respect to the un‐deformed (horizontal) position of the member.
8
Pw (^) M AB M^ BA L A^
B AB Un‐deformed position^
Tangent at ABA Elastic curveElastic curveB’Ψ θA ΔθB^ ΨA’ Cord Tangent at B
-^ Ψ^ denotes^ the^ rotation^ of
the^ member’s chord (straight lineΨ denotes the rotation of the member s chord (straight lineconnecting the deformed positions of the member ends) due tothe relative translation Δ.
10
Pw (^) M AB M^ BA L A^
B AB Un‐deformed position^
Tangent at ABA Elastic curveElastic curveB’Ψ θA ΔθB^ ΨA’ Cord Tangent at B
-^ Since^ the^ deformations^ are
assumed^ to^ be^ small,^ the^
chord Since^ the^ deformations^ are^
assumed^ to^ be^ small,^ the^ chord rotation can be expressed as
ψ
Pw (^) M AB M^ BA L A^
B AB Un‐deformed position^
Tangent at A^ ΔBBAA Elastic curveElastic curveB’ ΨθA ΔθB ΨA’ Tangent at B Cord ΔAB • From figure we can see that
A
∆+∆∆+∆ ==θ θ
-^ By substituting^ Δ/L=Ψ^ into the preceding equation we have,
∆∆ BA θ θ
∆∆ ABBA =−=−ψθψθ BAL • Δis tangential deviation of end B from the tangent to the elasticBA (^) curve at end A and Δis the tangential deviation of end A fromAB (^) the tangent to the elastic curve at end Bthe tangent to the elastic curve at end B.A di t th d t th th^ i
-^ According to the second‐moment area theorem, the expressionsfor the tangential deviations
Δand^ Δcan be obtained byAB^ BA^ summing the moments about the ends A and B, respectively, of thearea under M/EI diagram between the two ends.
14
-^ Assuming that the member is prismatic (EI is constant along thelength of the member) we sum the moments of the area under theM/EI diagram about the ends B and A, respectively, to determineM/EI diagram about the ends B and A, respectively, to determinethe tangential deviations.
BAABB BA^
-^ In which gand gare the moments about the ends B and A,B^ A^ respectively, of the area under the simple
‐beam bending moment diagram due to external loading (M
diagram).L^ diagram due to external loading (M
diagram).L^
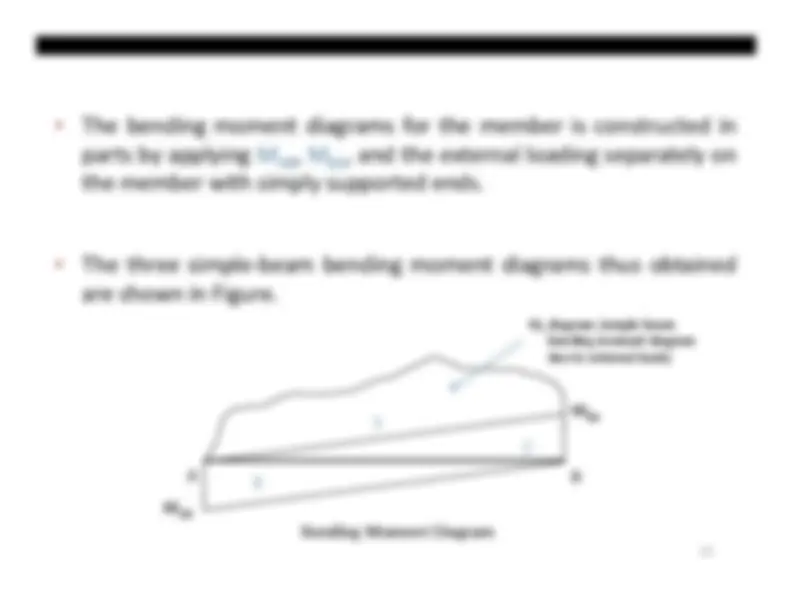
-^ The^ three^ terms^ in^ equations
(^4 a^ &^4 b)^ represent^ the^ tangentialThe three terms in equations (^4 .a & 4.b) represent the tangentialdeviations due to MAB, M , and the external loading, actingBA^ separately on the member, with a negative term indicating that thedi i l d i^ i^ i^ i^ h^ di^ i^
i corresponding tangential deviation is in the direction opposite tothat shown on the elastic curve of the member.^2 LM^ AB^ EI^6 M^ AB
(^2) LM AB EI 3 17 M^ AB A^ Tangential deviation due to M
AB
-^ By substituting the expressions for
Δand^ Δinto Eq. 3, we haveBA^ AB^ (^
) 5
gLMLM BBAAB =−ψθ A
(^ ) (5b)
ψθ AEILEIEI ABAAB^ ++−=−ψθ B • To express^ the^ member^ end^ moments^ in^ terms^ of
the^ end B^36 EILEIEI rotations, the chord rotation, and the external loading, we solveEq. 5 simultaneously for M^ and MBA. Rewriting Eq. 5a asAB^ gLMLM^^22 BABBA^ (^ )ψθ^ −−−=^2 AEILEIEI^33
19
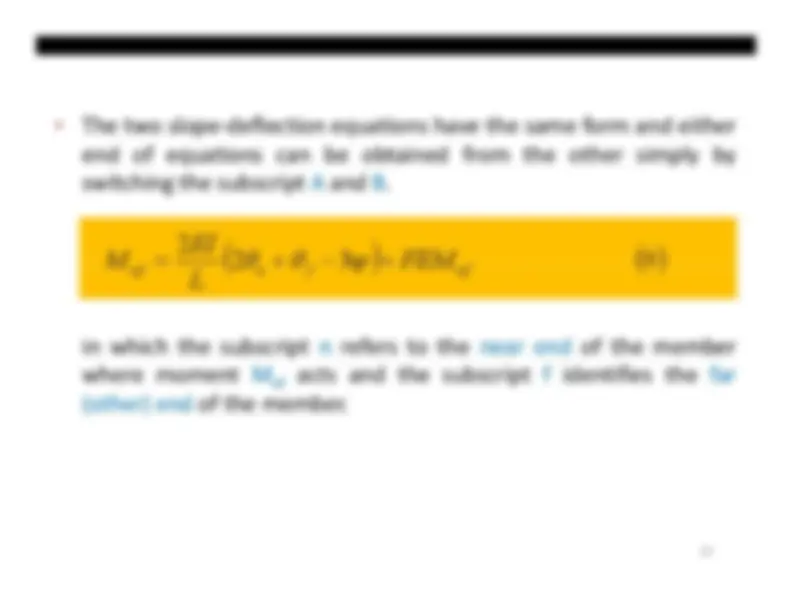
-^ By substituting this equation into Eq. 5b and solving the resultingequation for M^ , we haveAB^ EI^
(^22) ( ) (^ )^ (
) agg
ABBA AB^
22 32 −+−+=ψθθ^2
(^22) ( ) (^ )^ (
) bgg
ABBA BA^
22 32 −+−+=ψθθ^2
-^ It indicates that the moments develop at the ends of a memberdepend on the rotations and translations of member’s ends as wellas on the external loading applied between the endsas on the external loading applied between the ends.
20