



Stability
Docsity.com



Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Stability analysis in physics through various concepts such as lagrangian equilibria, matrix stability, orbital potentials, and lyapunov stability. It covers topics like expanding lagrangians near equilibrium, second derivative tests, normal modes, and effective potentials. Useful for students in physics and related fields.
Typology: Slides
1 / 9

This page cannot be seen from the preview
Don't miss anything!
‐dimensional
Lagrangian
can
be
expanded
near
equilibrium.
Expand
to
second
order
2 , 2 2 , 2 2 , 2 2 , , , 0 0 0 0 0 0 0 0 0 0 0 0
q
L q
q q
q q
L
q
L q
q
L q
q
L q
L
L
q q q q q q q q q q q
q^
^
^
2
2
Docsity.com
general
set
of
coordinates
gives
rise
to
a
matrix
form
of
the
Lagrangian.
Normal
modes
for
normal
coordinates.
The
eigenfrequencies
2
determine
stability.
If
stable,
all
positive
Diagonalization
of
V
j i ij
j i ij^
q q V q q G L
1 2
1 2
2
2
2
1 2
j
j
j
i^
x
q
c
2
j
Kepler
orbits
involve
a
moving
system.
Effective
potential
reduces
to
a
single
variable
Second
variable
is
cyclic
2 2 2
r J
k r
eff
dr dV
r
eff
r
r
V
eff
r^0
r^
r^0
Docsity.com
Kepler
orbits
can
have
a
perturbed
potential.
Not
small
at
small
r
Two
equilibrium
points
Test
with
second
derivative
Test
with
r
2 2
3
r J
b r
k r
eff
b k
k J
k J
r^
2 (^42)
2
0
r
V
eff
r^0
r A
2 3
4
2
J r
r b
k r
dr dV
eff
2
2
b k
r k J
r
b k
k J
k J
rA
2 (^42)
2
stable unstable
Lyapunov
function
is
defined
on
some
region
of
a
space
including
Continuous,
real
function
The
derivative
with
respect
to
a
map
f
is
defined
as
a
dot
product.
If
exists
such
that
then
the
point
is
stable.
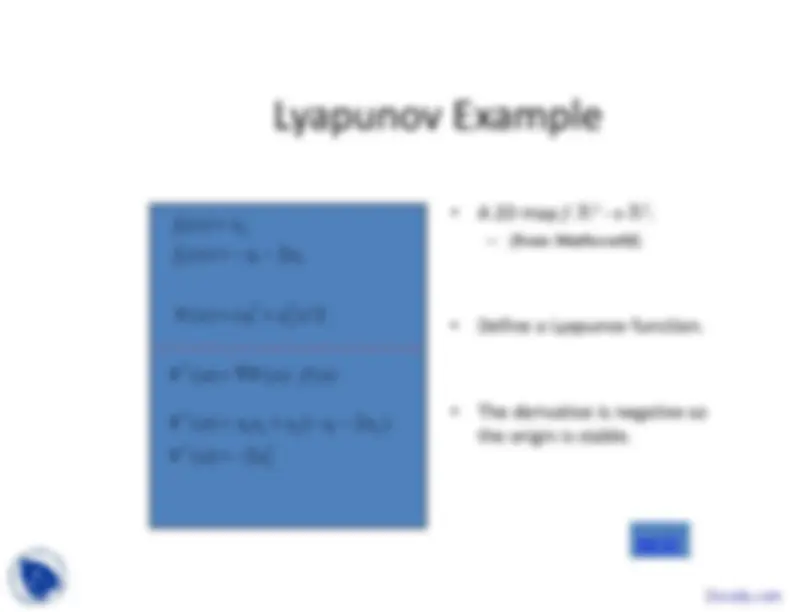
x
x V
*^
x f x V x V