


Chapter (5)
STABILITY
1



























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
A comprehensive introduction to stability in control systems, focusing on the routh-hurwitz method for determining system stability. It covers key concepts like system stability definitions, the s-plane, and the routh-hurwitz criterion. Illustrative examples and special cases to enhance understanding. It is suitable for students studying control systems or related engineering disciplines.
Typology: Cheat Sheet
1 / 40

This page cannot be seen from the preview
Don't miss anything!
1) Known the definition of stability. 2) Determine the stability conditions by evaluating poles of transfer function. 3) Make and interpret a basic Routh table to determine the stability of a system. 4) Make and interpret a basic Routh table where either the first element of a row is zero or an entire row is zero. 2
1. Introduction The stability of a cone.
1. Introduction
forced natural
1. Introduction Stability in the s-plane.
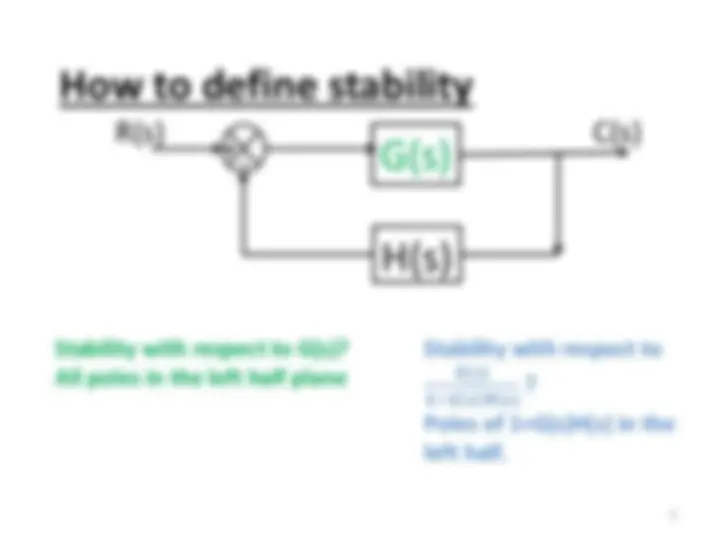
How to define stability H(s) G(s) R(s) C(s) +
- Stability with respect to G(s)? All poles in the left half plane Stability with respect to 𝑮(𝒔) 𝟏+𝑮 𝒔 𝑯(𝒔)
Poles of 1 +G(s)H(s) in the left half.
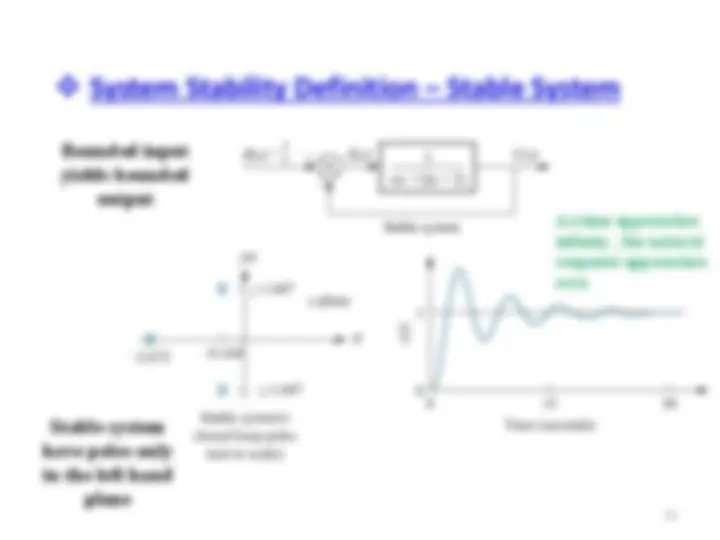
❖ System Stability Definition – Stable System As time approaches infinity , the natural response approaches zero Bounded input yields bounded output Stable system have poles only in the left hand plane
❖ System Stability Definition – Unstable System Time approaches infinity the natural response approaches infinity Bounded input yields an unbounded output Unstable system have at least one pole in the right hand plane And/or poles of multiplicity greater than one on imaginary axis
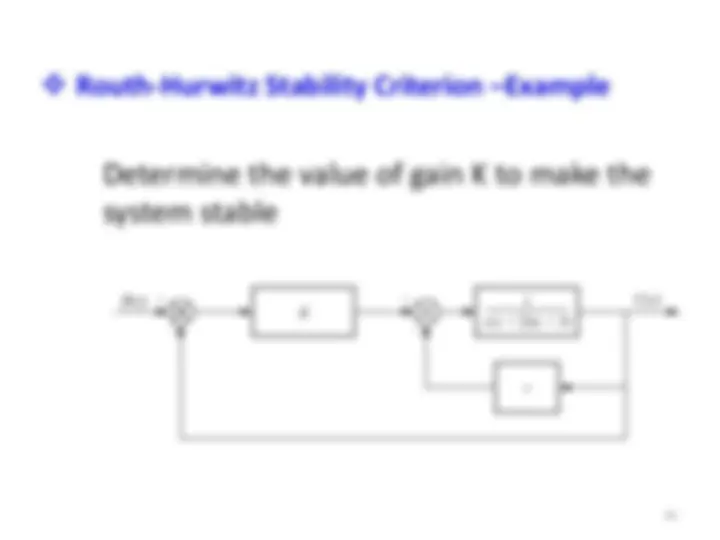
❖ How do we determine if a system is stable? It is not always a simple matter to determine if a feedback control system is stable. Consider the system below We need a method to test for stability without having to solve for the roots of the denominator!! 13
❖ Routh-Hurwitz Method ➢ A method that yields stability information without the need to solve for the closed-loop system poles. ➢ Using this method, we can tell how many closed-loop system poles are in the left half-plane, in the right half-plane, and on the jw - axis (imaginary axis). ➢ Notice that we say how many, not where. We can find the number of poles in each section of the s-plane, but we cannot find their coordinates. ➢ The method requires two steps: ( 1 ) Generate a data table called a Routh table ( 2 ) Interpret the Routh table to tell how many closed- loop system poles are in the left half-plane, the right half-plane, and on the jw - axis.
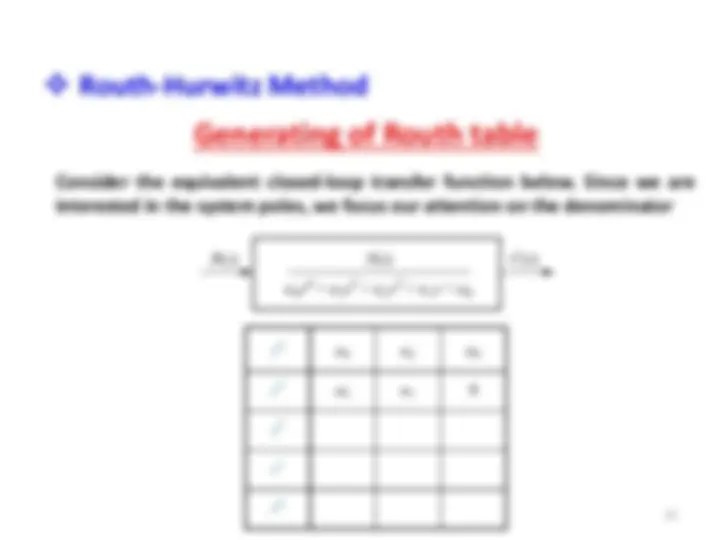
Generating of Routh table
Generating of Routh table Example:
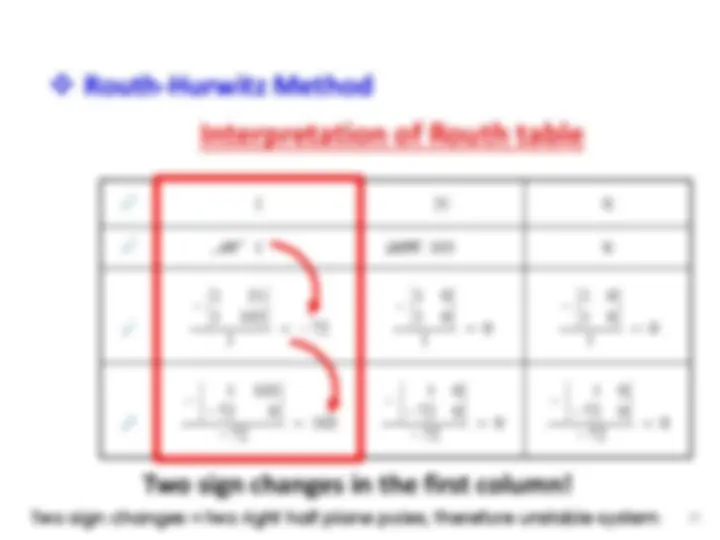
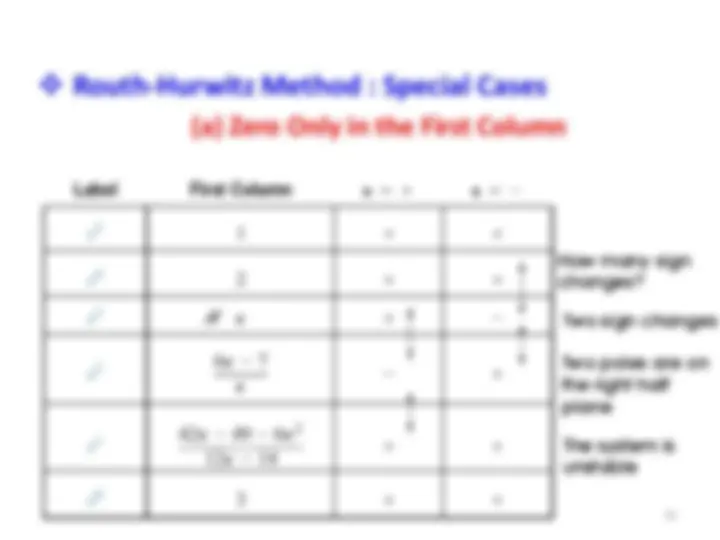
❖ Routh-Hurwitz Method Interpretation of Routh table Routh-Hurwitz criterion declares that the number of roots of the polynomial that are in the right half-plane is equal to the number of sign changes in the first column.
❖ Routh-Hurwitz Method Interpretation of Routh table Two sign changes in the first column! Two sign changes = two right half plane poles, therefore unstable system^20